泵用直线电机控制策略及试验研究
2016-09-18聂松林黄叶青
聂松林,刘 帆,黄叶青,马 凯,李 雷
(北京工业大学机械工程与应用电子技术学院,北京 100124)
泵用直线电机控制策略及试验研究
聂松林,刘 帆,黄叶青,马 凯,李 雷
(北京工业大学机械工程与应用电子技术学院,北京 100124)
针对传统水液压柱塞泵输出流量脉动大、振动噪声高的问题,研制出一种以直线电机作为动力端的直驱水压柱塞泵.为减小直线电机换向对泵体产生的振动冲击,消除多个电机运行时的相位误差,实现柱塞泵低振动、流量稳定输出,对直线电机单直线电机控制模式、多电机协同控制策略以及电机运动顺序进行研究试验.试验结果表明:4台直线电机在SPLINE运动模式下以三角波曲线在插补点同步,按照优选出的启动顺序运动是实现柱塞泵低振动,输出流量稳定的最佳控制方式.
直线电机;控制模式;协同控制;启动顺序;低振动
常用水压柱塞泵主要是曲柄连杆柱塞泵和轴向柱塞泵,由于其中间连接机构如旋转电机、主轴等都存在偏载力和不平衡力矩,易引起较大的机械振动和流量脉动[1].直线电机可以使电能直接转化为直线运动机械能并且不需要任何的中间传递装置,通过将直线电机、流体传动和控制技术相结合,本课题组研制出了一种新型的直驱水压柱塞泵[2],利用直线电机作为其动力端,简化装置,有效地提高了柱塞泵的可靠性和传递效率[3].由于直驱水压柱塞泵各柱塞缸之间无机械耦合,只依靠直线电机带动柱塞按照规划的运动速度和相位差运动.因此要实现柱塞泵低振动,低流量脉动输出,需要充分发挥直线电机良好的伺服控制特性,对其采取有效控制方法.目前,董武涛等[4]提出一种实现柱塞泵恒流量输出的运动规划.黄叶青等[5]在直驱泵样机上对三角波速度曲线和S波速度曲线进行振动试验研究,试验得出当直驱泵采用三角波曲线运行时,系统的振动比采用S波曲线运行时要低.本文在以上研究基础上,分析直驱泵运动速度曲线,依次对单直线电机的运动控制策略,多直线电机的协同控制策略,以及多电机启动顺序3方面进行试验研究,找出最佳运动控制方式.
1 直线电机伺服控制系统研究
直驱水液压柱塞泵由4组双作用双边平板式永磁同步直线电机,与高度集成化的阀配流式水压柱塞泵组合而成[6-7].直线电机与柱塞泵柱塞杆直接连接,中间没有任何转换装置.系统原理如图1所示,左侧缸套内液体被活塞加压,从排出阀排出到总排出管线,而右侧液体被吸入缸套中.当电机反向运行时,左侧液体被吸入缸套,右液体被排出缸套.控制器利用光栅传感器采集每个电机的位移信号,使直线电机按给定的运动规律运动,保证电机的相位差,从而驱动柱塞泵正常工作.
如图2所示,在本系统中,以PMAC多轴运动控制器为系统核心,通过LabVIEW软件设计,实现对系统初始参数的设定、运动轨迹的规划以及系统状态的监控.PMAC控制器调节输出PWM信号,经过PWM放大器,驱动永磁同步直线电机,带动柱塞往复运动.电机的速度和位置信息通过安装在电机上的海德汉LIDA 477光栅传感器(光栅分辨率为0.5 μm)采集获得.
2 单直线电机运动控制
2.1直线电机运动速度曲线规划
直线电机动子直接带动柱塞杆实现柱塞在缸体内往复运动,因此柱塞的速度曲线和电机动子的运动曲线一致.目前,工业机床中常用的加减速控制曲线为三角波和S波和指数波[8].针对直线电机的特性和需求,对这3种速度曲线进行分析.
三角波速度曲线规划函数速度表达式为
式中A为直线电机速度幅值.
由式(1)绘出行程205 mm,往复频率1 Hz下三角波速度、位移和加速度曲线,如图3所示.三角波的实质在于限制了加速度的大小,这样也就限制了电机的启动电流和启动转矩.三角波在加减速切换瞬间存在加速度的急速转换,这种转换会对机械部件造成冲击,易造成流量脉动.
S波速度曲线规划函数速度表达式为
本文选择的S波曲线采用7段加减速模式[9],如图4所示,该模式下S波曲线在任意位置的加速度变化连续,可避免柔性冲击.考虑到多台电机速度曲线叠加需为恒值,S曲线匀速段时间设为零.
指数波速度曲线规划函数速度表达式为
式中A为直线电机速度幅值.
由式(3)绘制出指数波曲线,如图5所示.从图3~5不难看出,加速度指数波曲线在加减速起点和电机换向处的加速度幅值最大.柱塞泵配流阀在不断的开启关闭过程中,加速度过大,会对配流阀零部件造成严重的冲击,减小阀芯寿命.因此不考虑指数波作为运动曲线.
加速度越大,电机的惯性力就越大.S波曲线的加速度在1个周期内存在5次阶跃,电机惯性力也存在5次阶跃,力的反复变化易对流量造成影响.而三角波的加速度大小平稳,在1个周期内只存在2次阶跃,电机惯性力也随之比较平稳,并且三角波曲线算法简单.因此,本文规划三角波曲线作为直驱泵的速度曲线.柱塞泵的瞬时流量和柱塞的瞬时有效速度成正比,在直线电机运动规划中,期望通过多个电机速率叠加实现流量恒定.如图6所示,只要控制每2台直线电机间的相位差保持在T/4,理论上就能实现柱塞泵出口流量叠加恒定.
2.2直线电机运动模式
减少柱塞实际运动与理论运动误差的关键在于提高直线电机往复运动的精度.本文主要对PMAC控制器直线(LINEAR)模式、样条曲线(SPLINE)模式、位移速度时间(PVT)模式研究.
在PMAC中LINEAR模式是最通用的方式,LINEAR模式是以离散点为基础产生的二次B样条运动轨迹.SPLINE1模式是一个均匀的非有理三次B样条.在SPLINE1模式下,长移动被分成时间相等的段,优势为工作量减少,便于计算,使用时仅定义位置的坐标点即可.
PVT模式对轨迹轮廓能进行更加直接的控制,PVT模式的插补指令路径通过编程点,创建了Hermite样条曲线的路径[10].PVT模式需要对每一步的移动,指出移动结束的位置(距离)、速度和时间.
2.3单直线电机控制方式试验测试
在Pewin32pro2软件中编写运动控制程序,利用LabVIEW软件构建与PMAC通信的上位机控制界面,如图7所示.对LINEAR、SPLINE、PVT三种运动模式展开试验,采集各模式下的速度、跟随误差及加速度参数.
为防止电机误差过大,PMAC内设有最大跟随误差报警值,达到此值,电机会停止运动.因此,本文对各运动模式下的最大跟随误差进行对比分析.试验结果如图8所示,LINEAR模式电机最大跟随误差为98.2 μm;SPLINE模式下电机最大跟随误差为100 μm;PVT插补算法电机最大跟随误差为100 μm.从曲线图不难看出,3种模式的跟随误差数值大小相近,电机速度跟随性良好.但无论选择哪种运动模式,由于电机的伺服特性,电机速度的跟随误差都不可消除.
加速度变化会引起电机力的变化,对系统的振动特性造成影响.因此,本文对3种模式下的速度及加速度进行采集和分析,如图9所示.可以看出,加速度曲线皆是不平滑曲线,带有大量毛刺.在LINEAR模式下,电机在速度峰值和电机换向2处出现加速度突变,最大值为6.5 g;在SPLINE模式下,电机只在速度峰值处出现加速度突变,最大值为4.7 g;而在PVT模式下,电机在速度峰值和电机换向2处出现加速度突变值,幅值较大达到8 g.对比3种模式的加速度曲线,在SPLINE模式下电机的加速度波动较为稳定,引起的振动较小.
3 多电机协同控制策略
要使多台电机协调运动,规划电机启动顺序,保持一定的相位差,可以将电机分配给不同坐标系的轴,利用每个坐标系时基开启顺序,保证电机启动时的相位差,本文称为时基控制.还可以将它们分配在同一坐标系中的不同轴上,依靠控制器的插补与位置控制功能[11],依照运动程序指令和规划的相位差,多个轴协调运动,本文称为插补点控制.
理论上,选取合适的协同控制算法,电机能够精确定位,电机的速率叠加为恒值.受电机伺服特性的影响,跟随误差无法消除,因此不论选择哪种协同方式,4台电机的速率叠加值不可能完全为恒值,如图10、11所示.
计算2种控制方式下的电机速率波动率,时基控制只在电机启动时利用时基的开启顺序来保证电机的相位差,在之后的电机运行过程中没有对电机相位差进行修正,这种方式导致电机运行相位误差慢慢积累,速率叠加波动到达1.5%.插补点控制方式在每一次运行周期内,都对电机的速度、位置插补点进行一次计算,能更精确地保证电机的相位差,速率叠加波动率为0.4%,比较稳定.
4 电机启动顺序测试试验
电机空间结构及电机协同运动产生力矩间的作用力,都会影响系统的振动.因此,合理规划电机启动顺序,通过振动试验寻找多组电机的最优运动顺序是实现系统低振动的关键.电机空间结构如图12所示.
由于加速度传感器灵敏度高、频率范围宽、线性动态范围大,在振动频率大于1 Hz时,被测信号较强等优点,将系统加速度作为测量对象,在直线电机与泵体上和机座上安装Coinv Dasp振动测试传感器.电机的振动点安装位置如图13所示,每个测量点采集3个方向的振动加速度.其中1#测量点(1、2、3通道)测试直线电机与机座之间加装JSD-850橡胶隔振器后的效果.
由于2台电机完全反向运动时的作用力可以充分抵消,因此1#电机作为起点时,将2#、3#、4#电机分别与1#电机完全反向运行展开实验,并对2组电机同时反向运动这一规划进行实验.
随机振动不可以用时间确定函数来描述,但可以通过统计特性来表征,因此功率谱密度是研究随机振动的好方法.功率谱密度实际是将对时域的振动转化为频域的振动.对于平稳随机的振动信号,功率谱密度是系统在随机动态载荷激励下响应的统计结果,是一条功率谱密度与频率的关系曲线.因此,功率谱密度曲线与横坐标轴围成的面积就是均方值g2,表达式为
式中PSD(f)为随机信号的加速度功率谱密度.
在实际的振动试验中,总的加速度均方值表示输给试验件的总能量,因此通过计算总的加速度均方值大小的方法来判断振动级别的高低,振动能量的大小[12].在整个频率段范围内,总的加速度均方值等于各频率段内加速度均方值的和,即
图14~17为通过对加速度信号的自相关进行傅里叶变换得到的各个启动顺序的加速度功率谱密度曲线.通过功率谱密度图可以读出具有不同固有频率的振动激扰所含振动能量的平均密度,从而避免或改进振动激扰以减小振动的破坏,同时也指出了其中哪些频率的功率是最主要的[13],为后期机械故障估测和小波分析提供理论依据.
由各功率谱密度曲线计算出各测量点均方值,如表1所示.由于橡胶隔振器对电机起到减振作用,无论何种启动顺序下,1#测量点(1、2、3通道)的振动加速度均方值明显低于2#测量点(4、5、6通道)均方值.
以振动效果明显的2#测量点作为分析对象,电机按照1234顺序运动时,2#点的加速度均方值总和为0.76,振动能量最低.比1243启动顺序减小55%,比1324启动顺序下减小48%,比13~24启动顺序下减小53%.
通过对比功率谱密度计算的均方值,得出电机以1234顺序启动时,电机在运动过程中的振动能量级别最低.并且加速度功率谱密度可以得到振动信号的特征频率,主要集中在50、600、900、1 300 Hz附近.引起系统振动的原因比较复杂,主要是由流体脉动及电机往复运动的惯性力产生的.可以通过仿真计算系统固有频率,结合电机特征频率,根据实际情况找到引发振动的主要原因,继而有助于针对性地消除机组振动缺陷.
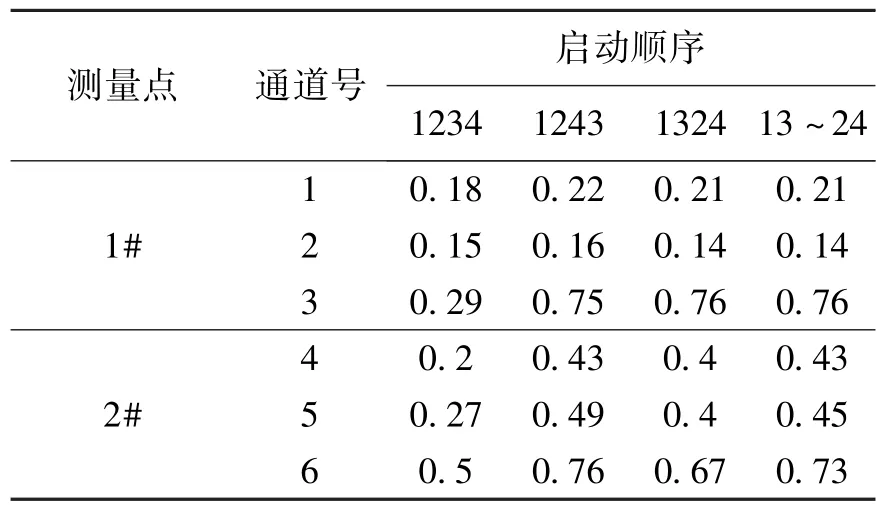
表1 各启动顺序下的加速度均方值Table 1 Acceleration of root mean square values under all starting-up orders
5 结论
1)以PMAC为核心的控制系统中,单直线电机以三角波曲线在SPLINE运动模式下运行,电机速度跟随性良好,加减速切换的瞬间加速度峰值小,对柱塞泵配流阀冲击较小.
2)多电机同步控制方式中,插补点同步方式能够在每一周期内对插补点速度和位置进行一次修正,电机相位差更精确,电机速率叠加波动小,便于更好地实现柱塞泵低流量脉动输出.
3)考虑电机空间结构,对选择出的4种电机启动顺序方案进行振动试验.电机按照顺序1234启动,振动能量最小,电机特征频率分布在50、600、900、1 300 Hz附近.
[1]朱磊磊.海水液压泵组结构振动特性的研究[D].武汉:华中科技大学,2007. ZHU L L.Research on vibration characteristics of water hydraulic pump group structures[D].Wuhan:Huazhong University of Science and Technology,2007.(in Chinese)
[2]贺小峰,朱磊磊.海水液压泵组振动特性的理论分析[J].机床与液压,2008,10(8):100-103. HE X F,ZHU L L.Theoretical analysis of vibration characteristics of seawater hydraulic pump[J].Machine Tool&Hydraulics,2008,10(8):100-103.(in Chinese)
[3]DONG W T,NIE S L.Application and prospect of the linear motor technology in the fluid power transmission and control[J].Hydromechtronics Engineering,2012,40 (19):83-87.
[4]董武涛,聂松林.直线电机驱动柱塞泵的运动规划研究[J].中国机械工程,2014,25(8):1080-1084. DONG W T,NIE S L.Research on motion planning of linear motor driven piston pump[J].China Mechanical Engineering,2014,25(8):1080-1084.(in Chinese)
[5]黄叶青,聂松林.面向舰船应用的直线电机泵控制策略及振动试验研究[J].北京工业大学学报,2015,41 (11):1727-1733. HUANG Y Q,NIE S L.Research on motion planning of linear motor driven piston pump[J].Journal of Beijing University of Technology,2015,41(11):1727-1733.(in Chinese)
[6]聂松林,董武涛.直线电机驱动柱塞泵: CN102305203A[P].2012-01-04.
[7]聂松林,董武涛.双边平板式直线电机: CN103236774A[P].2013-08-07.
[8]许良元.数控加工中加减速控制曲线的研究[J].机械工程师,2006(9):65-67. XU L Y.Research on acceleration and deceleration controlling curve in NC machining[J].Mechanical Engineer,2006(9):65-67.(in Chinese)
[9]李晓辉,邬义杰,冷洪宾,等.S曲线加减速控制新方法的研究[J].组合机床与自动化加工技术,2007 (10):50-53. LI X H,WU Y J,LENG H B,et al.Study on the new method of S-curve acceleration and deceleration control [J].Modular Machine Tool&Automatic Manufacturing Technique,2007(10):50-53.(in Chinese)
[10]王慧,黄帅.PVT在同步运动控制中的应用[J].电子工业专用设备,2013,220(6):42-44,53. WANG H,HUANG S.PVT in the application of the synchronous motion control[J].Equipment for Electronic Products Manufacturing,2013,220(6):42-44,53.(in Chinese)
[11]杨铁宁.直线电机往复泵的性能研究[D].东营:中国石油大学,2009. YANGTN.Performancestudyonlinearmotor reciprocating pump[D].Dongying:China University of Petroleum,2009.(in Chinese)
[12]郑志国,王宇峰.随机振动中的参数介绍及计算方法[J].电子产品可靠性与环境试验,2009,27(6):45-48. ZHENG Z G,WANG Y F.Parameters of random vibration and its calculation method[J].Electronic Product Reliability and Environmental Testing,2009,27 (6):45-48.(in Chinese)
[13]姜威威.现代信号处理方法在电机振动分析中的应用[D].大连:大连交通大学,2012. JIANG W W.Modern applications of signal processing methods for motor vibration analysis[D].Dalian:Dalian Jiaotong University,2012.(in Chinese)
(责任编辑 杨开英)
Control Strategy and Experiment of a Linear Motor for Pumps
NIE Songlin,LIU Fan,HUANG Yeqing,MA Kai,LI Lei
(College of Mechanical Engineering and Applied Electronics Technology Beijing University of Technology,Beijing 100124,China)
Owing to the big output pulsation and high vibration noise in traditional water hydraulic piston pumps,a water hydraulic pump driven by the linear motor was developed.To reduce the impact of vibration on the pump body when the motor reverses,to eliminate the phase error of multiple motor at runtime,and to realize the low vibration and constant flow output of piston pump,the single linear motor control mode,motor coordination control strategy and motor moving sequence were studied.Result shows that the optimal control method for reducing the vibration of the piston pump and keeping the stability of flow is that the four linear motors should start in optimized boot sequence,with running in triangular wave curve and interpolation synchronous control method under the SPLINE movement mode.
linear motor;control mode;coordinated control;boot sequence;low vibration
TH 322;TH 137.51
A
0254-0037(2016)09-1286-08
10.11936/bjutxb2015090047
2015-09-17
国家“863”计划资助项目(2012AA091103);国家自然科学基金资助项目(11572012、51375018);北京市人才强教计划资助项目(CIT&TCD20130316)
聂松林(1967—),男,教授,博士生导师,主要从事流体传动与控制方面的研究,E-mail:niesonglin@bjut.edu.cn.