基于SVM的上肢康复机械臂轨迹跟踪预测控制*
2016-09-16李世扬储泽楠张天鹏安阳工学院电子信息与电气工程学院河南安阳455000安阳工学院计算机科学与信息工程学院河南安阳455000
王 頔,李世扬,储泽楠*,石 峰,张天鹏(.安阳工学院电子信息与电气工程学院,河南安阳455000;.安阳工学院计算机科学与信息工程学院,河南安阳455000)
基于SVM的上肢康复机械臂轨迹跟踪预测控制*
王頔1,李世扬2,储泽楠2*,石峰1,张天鹏1
(1.安阳工学院电子信息与电气工程学院,河南安阳455000;2.安阳工学院计算机科学与信息工程学院,河南安阳455000)
针对上肢康复训练机械臂具有强耦合、非线性和时变的特点,设计了基于SVM(支持向量机)的轨迹跟踪预测控制器。采集机械臂系统的输入和输出数据,通过SVM辨识得到广义逆系统,与原系统串联实现解耦。对解耦后的系统,采用SVM辨识预测模型和PSO优化滚动控制序列的预测函数控制方法,并从其内模结构分析了系统的稳定性和鲁棒性。实验结果表明,该方法能够平稳高精度地实现轨迹跟踪。
上肢康复机械臂;轨迹跟踪;预测控制;支持向量机
上肢康复训练机械臂具有自由度多、运动范围大、强耦合、非线性等特点,用于辅助治疗或替代医师实现患者的康复治疗。由于使用对象的特殊性,康复机械臂必须快速、平稳、准确调整位姿以适应不同体态患者的训练要求。
预测函数控制采用预测模型、滚动优化和反馈校正的控制策略[1-2],降低了对控制系统模型精度的依赖[3-4]。预测函数控制最大的特点是强调控制量的结构形式[5-6]。通过历史信息和设定的预测时域内未来输入对控制过程输出进行预测[7]。针对模型失配、时变特性以及不可避免的扰动带来的不确定性,预测控制采用有限时域内滚动优化的方法处理,通过反复在线优化得到控制序列,优化控制效果[8]。广义逆系统方法可以很好的解决复杂的非线性系统的多变量解耦和反馈线性化问题[9-10]。支持向量机(SVM)具有良好的非线性逼近能力和泛化能力,采用SVM辨识广义逆解耦的子系统可以提高模型精度[11-12]。为了提高动态控制性能,采用PSO对控制序列系数进行优化。粒子群算法具有鲁棒性强、优良的分布式计算等优点,适用于预测控制的滚动优化求解[13-15]。结合上述特点,本文采用SVM辨识广义逆解耦系统和预测模型,PSO优化预测控制参数的预测函数控制结构,实现对上肢康复训练机械臂的平稳快速跟踪控制。
1 动力学模型

式中:τi为作用于第i个关节上的惯性主动力,i=1,2,…,6。等式右边第1部分表示角加速度惯量项,第2部分表示驱动力惯量项,第3部分表示科里奥利力和向心力,第4部分表示重力项。q、q˙、q¨分别表示对应各关节的位置、速度及加速度。由于机械臂的质量分布三维,各驱动力惯量Ii(act)难以
建立坐标系采用D-H方法,各个关节相对固定坐标系的空间关系用齐次变换表示,相邻两关节的空间关系用齐次变换矩阵表示,从而推导出末端执行器坐标系相对基座标系的齐次变换矩阵,建立末端执行器的空间坐标系。建立上肢康复训练机械臂末端执行器坐标系和基坐标系之间的变换关系,并基于研究上肢康复训练机械臂位置和姿态关系即运动学基础上,根据拉格朗日建模原理得到其动力学模型为:确定,关节摩擦会产生力矩以及外界扰动和参数精度等问题,精确的动力学模型很难确定,将产生轨迹跟踪误差。因此,采用不依赖模型精度的预测控制算法,将提高控制和跟踪精度。
2 预测函数控制
预测函数控制具有预测控制的3个基本特征:预测模型、滚动优化和反馈校正。预测函数控制的特点在于强调控制量的结构形式。预测函数控制算法的控制量设定为一组与跟踪设定值和被控对象性质有关的基函数的线性叠加,基函数一般选取为阶跃信号、斜披信号等。当跟踪设定值为c()k时,对应PFC控制量表达式为:

式 中 ,k=1,2,…,N,kc(k)=[μ11(k),…,μN1(k)],km(k)=[μ12(k),…,μN 2(k)]。
对于上肢康复训练机械臂而言,选取阶跃函数和斜坡函数两个基函数可以满足系统控制精度的要求。针对SVM辨识得到的广义逆系统与上肢康复训练机械臂模型串联得到的伪线性系统,按图1设计预测函数控制系统。其中,c(k)为跟踪设定值即上肢康复训练机械臂给定位置,u(k)为控制量输出,yg(k)为被控对象输出值,ym(k)为预测模型输出值,y(k)为实际对象即上肢康复训练机械臂位置输出,为系统实际输出和预测模型输出的误差。
预测函数控制的校正一般可以通过系统实际输出与预测模型输出的误差即e()k+i实现对系统输出进行补偿,因此预测函数控制的效果一定程度上依赖于预测模型的精度。上肢康复训练机械臂的动态特征由运动学和动力学方程表述的数学模型体现,该数学模型是非线性的且可逆,可以采用广义逆实现对非线性系统的控制。精确的数学模型不易得到,且求逆过程复杂,实际运动过程难以求解精确的逆过程,故采用SVM辨识广义逆系统的方法。为了简化算法,解耦后的6个控制器的预测模型通过SVM辨识得到。将PSO离线寻优得到的结果代入滚动优化控制序列,设计预测函数闭环控制器,对上肢康复训练机械臂进行轨迹跟踪和实时控制。
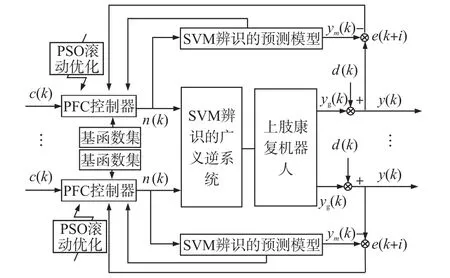
图1 总控制框图
2.1SVM辨识的广义逆系统
在非线性反馈线性化方法中,逆系统方法较直观、容易理解。逆系统线性化和解耦后得到的伪线性系统为纯积分系统,不易得到稳定的闭环系统。广义逆解耦可以实现解耦后的伪线性系统极点的任意配置,进一步提高系统的动态性能。为了提高上肢康复训练机械臂系统模型的精确性及简化求逆过程,采用SVM辨识其逆模型。上肢康复训练机械臂动力学模型表达式如式(1)所示。原系统中,τ1,τ2,…,τ6为系统输入,q1,q2,…,q6为系统输出,在辨识逆系统时,将原系统输出作为辨识系统的输入,原系统输入作为辨识系统的输出,采用6个SVM进行辨识。首先,采用方波信号作为激励信号,取原机械臂系统100组数据作为辨识数据,其中,每组数据包含6个关节的τ和q。由于系统是二阶系统,需要对采集的数据进行处理。对采集到的q分别求一阶导q˙和二阶导q¨,得到关节速度和加速度,得到辨识数据其中,i=1,2,…,6,j=1,2,…,100。取前80组数据为训练集,后20组数据为测试集,SVM核函数选用径向基核函数,SVM参数惩罚参数c、RBF核参数g 和p优化选用PSO寻优方法确定。通过辨识,得到广义逆系统。最后,将得到的广义逆系统与实际的机械臂系统串联,得到伪线性系统,实现动态解耦。可知,对于上肢康复训练机械臂动力学系统,解耦后的伪线性系统传递函数为


图2 基于SVM辨识的广义逆系统
2.2基于PSO的预测函数滚动优化
为了保障良好的跟踪性能,预测函数控制的优化目标通常选为系统预测输出与参考轨迹误差的平方和,即:

其中,ns为预测时域内拟合点的个数,hi为第i个拟合点上的数值。优化的目标是求取一组控制系数,满足整个优化时域内系统预测输出尽可能与参考轨迹接近,使得式(4)最小。传统的预测函数是通过对目标函数的数值求解得到控制序列,如梯度下降法等,这些方法不能保证求解得到是全局最优解,且计算量大,计算复杂。对于解耦后的6个伪线性控制系统寻优目标是得到6组最优控制参数kc、km。以关节1控制系数求解为例,已知跟踪信号设定为阶跃信号时,则式(3)中kc(k+i)=kc(k),km(k+i)=km(k),即对于关节1控制而言,需求控制系数 μ1和 μ2。将 μ1和 μ2设定为全局最优解的x,y轴坐标,不断更新粒子的位置以实现式(4)值最小。用PSO求解预测函数控制序列的步骤如下:
(1)确定适应度函数,选用如式(4)所示的预测函数控制的优化目标函数,并采集输入信号和输入与输出信号的差值。
(2)初始化粒子群种群和速度,通过增大种群规模可以在一定意义上克服随机初始化造成的局部极小问题,经多次试验可知,设置粒子种群数为50时可取得最优值;
(3)代入采集输入信号和输入与输出信号的差值,计算适应度函数,更新速度和个体,多次优化得到最优解,预测函数的控制系数μ1,μ2;
(4)将全局最优粒子位置输出,并赋值给μ1,μ2,代入预测函数控制器中验证控制效果。
仿真和试验结果均表明,PSO离线寻优可以得到满足要求的控制系数,实现良好的控制效果。
2.3SVM辨识预测模型
对于上肢康复训练机械臂系统而言,精确的动力学模型不易得到,为了避免复杂的数学计算和推导,采用SVM辨识预测函数控制中的预测模型。此外,在难以准确描述实际操控系统的内部结构和控制机理的情况下,采取SVM辨识预测模型,也可以简化控制算法。针对解耦后的单输入单输出系统,可得:

其中,i=1,2,…,6。对上式引入一个回归矢量

则


图3 基于SVM辨识的预测模型
3 实验与分析
对于上述系统,代入PSO寻优得到的滚动优化控制参数,设计预测函数闭环控制器对上肢康复训练机械臂本体进行轨迹跟踪。其中,设定值c=1,采样周期Ts=1 s,参考轨迹时间常数为Tr=30 s,预测步长H1=10,H2=20。图4中,link1,link2,…,link6分别为第i个关节的位置输出,i=1,2,…,6,standard为标准的1/(s+1)2系统响应。6个关节的给定信号为相同的阶跃信号,跟踪效果如图4所示。从图4可以看出,各关节响应与设定的标准系统一致,达到了预设解耦效果,且输出静差为0,可以实现无静差轨迹跟踪。

图4 无扰动时系统响应
为了验证预测函数控制的鲁棒性和稳定性,观察加入扰动时系统响应的情况,并与传统PID控制效果比较。在上述控制系统中,对解耦后的单输入单输出系统分别进行PFC和PID控制,t=12 s时,加入d=0.1的扰动,PFC和PID控制效果如图5所示,图中所示为关节1在两种控制策略下的位置响应,关节2~关节6的位置响应曲线与关节1相同。
分析图5可知,相较于PID控制,预测函数控制输出平滑,无超调,但调节时间较长。对于上肢康复训练机械臂系统而言,采用预测函数控制能够更好的实现平滑控制,提高控制精度。

图5 两种控制策略控制效果比较
图6中,u分别为PFC和PID控制关节1的控制力矩输出,比较两种控制策略的控制力矩可知,PID控制初始控制力矩较大,但是短时间内可以平稳输出,外界扰动时,输出控制力矩变化较小,控制迅速。PFC控制力矩变化范围较小,输出力矩较小,变化较平稳。结合上肢康复训练机械臂的控制要求可知,安全性、舒适性、平稳性必须满足要求,基于SVM的预测控制算法能够保证更好的康复训练效果。
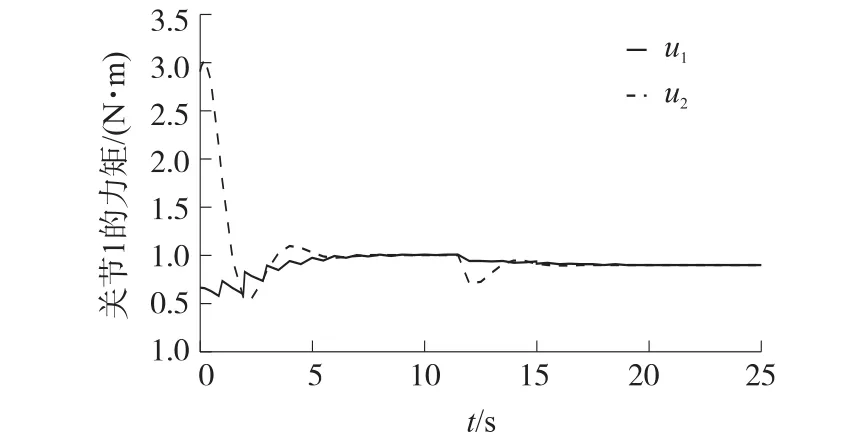
图6 两种控制策略控制力矩比较
4 结论
本文针对具有姿态调节功能的上肢康复训练机械臂采用了基于SVM辨识广义逆解耦系统和预测模型、PSO寻优控制序列的预测函数方法,实现运动轨迹的高精度跟踪。将广义逆系统方法用于上肢康复训练机械臂的解耦可以简化控制器,避免复杂的解析过程。设计基于SVM辨识预测模型和PSO优化控制序列的预测函数闭环控制器进一步保证了系统的鲁棒性。实验结果表明,该控制策略结构简单,无需在线调节参数,易于康复训练实现。
[1] 张日东,王树青.一类非线性系统的自适应预测函数控制[J].控制与决策,2007,22(6):711-715.
[2] 杨启志,曹电锋,赵金海.上肢康复机器人研究现状的分析[J].机器人,2013,35(5):630-640.
[3] 洪洲.最小二乘支持向量机在线建模在预测控制中的应用[J].电子器件,2014,37(1):154-156.
[4] 王頔,胡立坤.六轴机械臂广义逆系统SVM辨识与控制[J].广西大学学报(自然科学版),2013,38(5):1202-1207.
[5] Khaled Belarbi,Fayçal Megri.A Stable Model-Based Fuzzy Predictive Control Based on Fuzzy Dynamic Programming[J].IEEE Transactionson Fuzzy Systems,2007,15(4):746-754.
[6] 潘礼正,宋爱国,徐国政,等.上肢康复机器人实时安全控制[J].机器人,2012,34(2):197-203,210.
[7] 朱锐,吴旻骏,金弘晟,等.基于红外和彩色图像传感器的机械手臂控制系统[J].电子器件,2015,38(4):805-811.
[8] 马妍,宋爱国.基于STM32的力反馈型康复机器人控制系统设计[J].测控技术,2014,33(1):74-78.
[9] 刘志远.基于改进的支持向量机的开关磁阻电机的模型建立[J].电子器件,2014,37(1):146-149.
[10]唐耀华,郭为民,高静怀.基于核相似性差异最大化的支持向量机参数选择算法[J].模式识别与人工智能,2010,23(2):210-215.
[11]刘国海,张锦,赵文祥,等.两电机变频系统的支持向量机广义逆内模解耦控制[J].中国电机工程学报,2011,31(6):85-91.
[12]赛吉尔呼,戴盛芳,董爱华,等.基于SVM和RBFN的汽车主动降噪系统传感器故障诊断[J].传感技术学报,2014,27(4):512-517.
[13]曲健,陈红岩,刘文贞,等.基于自适应变异粒子群优化的SVM在混合气体分析中的应用[J].传感技术学报,2015,8:1262-1268.
[14]胡立坤,王頔,黄文琴.基于GA-SVM逆系统的机械臂内模控制[J].控制工程,2014,38(5):415-418.
[15]付华,王馨蕊,杨本臣,等.基于MPSO-CWLS-SVM的瓦斯涌出量预测[J].传感技术学报,2014,27(11):1568-1572.

王頔(1988-),女,汉族,河南省安阳市人,助教,安阳工学院电子信息与电气工程学院,硕士研究生,主要从事机器人技术与智能控制研究,yidi11@163.com;

储泽楠(1982-),男,汉族,河南范县人,副教授,安阳工学院计算机科学与信息工程学院,硕士研究生,主要从事机器人技术与智能控制研究,chuzenan@ 163.com。
Trajectory Tracking Predictive Controlof Upper Limb Rehabilitation Training Manipulator Based on SVM*
WANG Di1,LI Shiyang2,CHU Zenan2*,SHI Feng1,ZHANG Tianpeng1
(1.College of Electronic Information and Electrical Engineering,Anyang Institute of Technology,Anyang He'nan 455000,China;2.College of Computer Scienceand Information Engineering,Anyang Institute of Technology,Anyang He'nan 455000,China)
Due to the strong coupling,nonlinearity and time variance ofupper limb rehabilitation training robotarm,the predictive controller is designed with the core of SVM.And by collecting inputand outputdata of themanipulator,the generalized inverse system is identified with the help of SVM,which decouples with the original system. The decoupled systems adopt PFC control based on SVM identification of predictionmodel and predictive functional control sequence of PSO rolling optimization.Stability and robustness is analysed in term of internalmodel structure,experiment results show that the controlmethod can achieve stable and higher precision trajectory tracking.
upper limb rehabilitation training robotarm;trajectory tracking;predictive control;SVM
TP241.2
A
1005-9490(2016)04-0829-05
项目来源:河南省科技计划重点攻关项目(142102310188);河南省高等学校重点科研项目计划项目(15B535001);国家自然科学基金河南省联合基金项目(U1204613)
2015-09-17修改日期:2015-10-25
EEACC:721010.3969/j.issn.1005-9490.2016.04.016
