级联谐振微环慢光效应光学陀螺仪灵敏度分析*
2016-09-16李冬强李齐良朱梦云杭州电子科技大学通信工程学院杭州310018
李冬强,李齐良,朱梦云,张 真(杭州电子科技大学通信工程学院,杭州310018)
级联谐振微环慢光效应光学陀螺仪灵敏度分析*
李冬强,李齐良*,朱梦云,张真
(杭州电子科技大学通信工程学院,杭州310018)
针对光学陀螺仪灵敏度的问题,设计并研究了一个基于慢光效应的光学陀螺仪。采用微环谐振器级联的结构,根据微环谐振腔工作在谐振波长点时,产生慢光效应,使其可以积累较大的相移,能够探测较低的旋转速度,从而提高陀螺仪灵敏度。实验表明光学陀螺仪灵敏度可以通过改变谐振器耦合系数和微环半径而改变,微环半径从0~90μm增加时,灵敏度随之增加。同样的,灵敏度也随着耦合系数的增加而增加,从而优化光学陀螺仪的灵敏度。
光学陀螺仪;慢光效应;级联微环;灵敏度
20世纪70年代以来,随着低损耗光纤技术的出现,光学陀螺仪作为光传感技术最重要的成就之一也随之产生,并且在光通信领域中的应用也越来越受到人们的关注[1-2]。近年来光学陀螺仪不断发展,被应用于诸多领域,例如惯性导航、以及飞行器的姿态航向基准定位系等[3-6]。随着光学陀螺仪的广泛应用,普通的光学陀螺仪的灵敏度已经不能满足人们的需要。光学陀螺仪根据工作原理分为两类:干涉式光学陀螺仪和谐振式光学陀螺仪。然而干涉式光学陀螺仪的技术已经发展成熟,所以越来越多的人们把注意力集中在提高谐振式光学陀螺仪的灵敏度的研究上。由于微环中的慢光效应可以提高了光学陀螺仪的灵敏度。所以基于微环谐振器的光学陀螺仪引起了学者们极大的兴趣。2000年Leonhardt[7]U和Piwnitski P提出了一种高灵敏度的光学陀螺仪,其利用电磁感应透明产生的慢光介质中的萨格纳克效应。2004年Matsko A B[8]利用慢光在闭环侧耦合集成间隔序列的谐振器结构传播的色散特性实现一种高灵敏度微型光纤陀螺仪。2006年Scheuer J[9]和Yariv A研究了另一种耦合谐振波导结构的高灵敏度的光学陀螺仪,利用谐振器构成一种高度紧凑型结构,除了满足灵敏度需求,还达到了集成微型的效果。实验表明耦合谐振光波导用来制作导航级微光学陀螺仪有很大潜力[10-13]。近些年来,人们也对其做出了很多研究,2013年LeiMing[14]等人提出了一种利用外部激光二极管来构造微环谐振光陀螺仪,并且通过电流调制来提高陀螺仪的灵敏度。2013年Wang Kunbo[15]等又提出来一种在优化基础上最大化微环谐振腔输出的方法,来提高陀螺仪灵敏度。2015年Guo Lijun[16]等人利用激光频率调制光谱技术构造了一种开环微环谐振光陀螺仪。本文提出了一种基于级联耦合器的慢光效应的光学陀螺仪,通过选择不同的耦合谐振系数改变其灵敏度。
1 工作原理
光陀螺仪是一种敏感角速率的光纤传感器,它的产生源于1913年法国科学家萨格纳克提出的萨格纳克效应,其主要思想是任意几何形状的闭合光学环路相对于惯性系转动时,在光学环任一点的两束传播方向相反的光波在回到该点时相位会发生变化,产生相差[17]。所以光纤陀螺是实际上是一个基于萨格纳克效应的环形干涉仪。
本文根据基本原理的基础上,设计了一种基于级联微环谐振腔慢光效应的光学陀螺仪,其结构模型如图1所示。
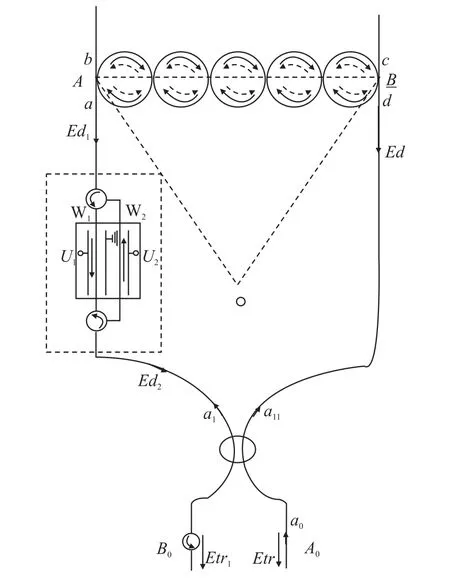
图1 基于级联微环谐振腔慢光效应的光学陀螺仪
初始信号a0由端口A0输入到3 dB耦合器里,并且分成两路相等的信号a1和a11,两路信号分别作为顺时针信号和逆时针信号。其中信号a1在环形器的作用下,输入电光调制器的W2端,在电光调制器里面进行相应的相位调制,然后经端口a进入级联谐振腔,并作为顺时针信号延级联微环谐振腔传播,并由d端口输出,经一系列处理后的信号为Ed;而信号a11由级联微环谐振腔的d端口进入谐振腔,并作为逆时针信号传播,在a端口输出信号Ed1,并经过电光调制器的W1端,进行相应的相位调制,输出信号Ed。可以证明,当谐振器工作在谐振波长时,信号在级联微环中产生了慢光效应,在微环中萨格纳克效应与慢光效应相结合。两路输出信号Ed和Ed2在经由耦合器的到最终的输出信号,并且在B0端口利用光探测器对输出信号进行探测。
下面我们将以单个微环为例,来研究光信号在微环中传播时,信号所积累的相位。其原理如图2所示。在传播中的相位积累有两部分构成:其中一部分就是传播引起的线性相位,另一部分就是旋转引起的旋转相位。

图2 在微环中的相位分析图
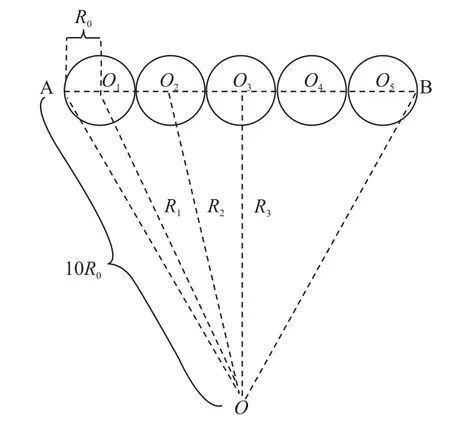
图3 级联微环几何结构图
我们假设光信号相对于环传播||d r距离,而用Δs来表示,在这段时间内,环所移动的距离。对于绕环中心转动的系统,相移只与光信号传播的长度有关,则有dφp=nω||d r/c。而对于旋转相位而言,就相对复杂的多,根据图2我们可以知道,移动Δs距离所经历的时间为:

其中c代表光在真空中的速度,n为光在微环中的折射率,υ=c/n代表光在微环中传播的速度。而V′代表光信号的相对速度,并且有V′=(1-αF)V,V是位移单元d r的速度,并且V=Ω×(R0+R0′),R0是微环谐振器的半径,R′代表环的中心到旋转点的距离。并且αF是斐索牵引系数,αF=1-n-2[18]。经过化简式(1)得到:

我们将V=Ω×(R0+R0′)代入到式(2)中,可以得到:

则旋转相位dφr有:

所以从θ1到θ2所累积的旋转相移为:

基于以上的研究,得到微环谐振腔的耦合矩阵方程M: M=C) M5M4M3M2M1,其中 M1、M2、M3、M4、 M5、分别是微环1、微环2、微环3、微环4、微环5的耦合矩阵方程。


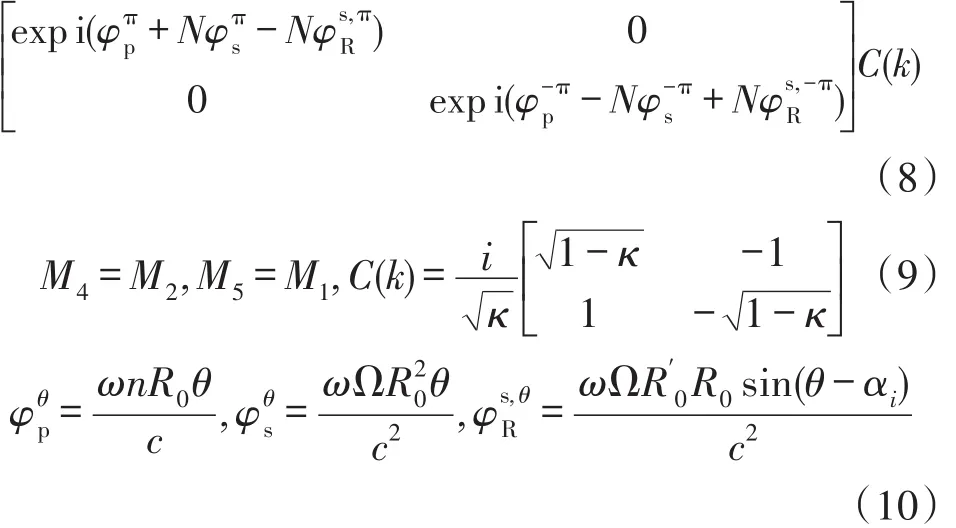
k是微环谐振器的耦合系数,w是光信号的频率,αι指第i个环中的角度,N=1代表与陀螺仪旋转方向相同的传播信号的耦合矩阵方程,而N=-1则代表与陀螺仪旋转方向相反的传播信号的耦合矩阵方程。
另外,本文中的系统不是绕中间微环的圆心旋转的,而是绕图中O点进行旋转,如图3所示,其中O点的位置是等边三角OAB的顶点,AB为5个级联微环直经的和,R0为微环的半经。所以根据三角形的勾股定理,我们可以算得式(10)中的R0′对于各个微环分别得到:R1=9.539R0,R2=8.888R0,R3= 8.660R0,R4=R2,R5=R1。
为了在B0端所检测的信号功率与旋转速度成比例,即系统工作在线性段,让逆时针信号和顺时针信号之间有π/2的相差,它通过利用铌酸锂(LiNbO3)材料制成波导,并在两端加入电压形成光电调制器来实现。根据Pockels效应有[19],加电压后相位差为:

这里n0是铌酸锂波导的折射率,γ是电光调制系数,L0是波导的长度,E0是电场强度,我们知道E0=U/d0,其中U是加在两端的电压。λ0是信号的波长。对于W2有Δφ2=0,对于WI有Δφ1=-π/2。并且根据级联谐振微环的耦合方程可得到输出与输入的关系方程:


2 慢光效应产生的相移和时间延迟
下面我们将分析在耦合微环谐振中由慢光效应引起的相移和时间延迟。我们选择输入功率I0= 10 mW,微环谐振腔耦合系数k=0.949,微环半经1.365×10-4m,旋转速度Ω=2 000π,在这种情况下来研究级联微环谐振腔的特性。基于透射率的定义,我们可以得到级联微环谐振腔的透射率其中t是时间,而Ea和Ed分别为图1中a点和d点的信号强度。
下面我们仿真其幅度(Amplitude)和相位(Phase)随波长(Wavelength)的变化,从图4可以看出光信号在谐振点时,幅度发生震荡变化,并且由于产生了慢光效应,从而导致相位发生了跳变。其中谐振点包括波长为1.55μm时,所以在下面陀螺仪性能的研究中,我们选择波长1.55μm作为光陀螺仪的谐振波长。

图4 透射率相位、幅度与波长的关系
为了进一步证明在谐振点发生了慢光效应,且产生了大的相位跳变,我们还研究了时间延迟,我们定义时间延迟τ=∂ϕ/∂ω,下面我们通过MATLAB仿真时延(Time Delay)与波长之间的关系。从图5我们可以看出在每个谐振点处都发生了较大的时间延迟,并且由于慢光效应在谐振点处产生较大的相移,相移的累积为这种谐振腔用作陀螺仪提供了可能。
下面在第3部分我们将具体分析在慢光效应的作用影响下,光陀螺仪的灵敏度,以及其他条件变化对灵敏度的影响。
3 陀螺仪灵敏度特性及分析
仿真中所用的数据取值为信号波长λ= 1.55×10-6m,折射率n=3,输入功率I0=10mW,光在真空中速度c=3×108m/s,微环谐振腔耦合系数k= 0.947。铌酸锂波导折射率n0=2.31,电光调制系数γ=32.2×10-12m/V,铌酸锂波导长度L0=200mm,像前面描述的那样,电光调制器在顺时针和逆时针信号之间引入一个非互易π/2的偏置相位,使得系统工作在线性区。这里我们令旋转速度Ω从0到4 000πrad/s,I=|Etr1|2,并定义d I/dΩ为其灵敏度。对输出信号进行仿真,可得到陀螺仪的灵敏度特性如图5所示。

图5 时间延迟与波长的关系
图6为输出信号(Output power)与旋转速度(Frequency of Rotation)的曲线关系,由图6可知,输出信号与旋转速度成比例关系,且在陀螺仪旋转速度较低时,输出信号与旋转速度也能保持较好的线性关系。一般的陀螺仪的输出功率表达式为 ID=I0(1+cos fs)[13],其中 I0为输入功率,φs是萨格纳克相移,输出信号与旋转速度呈现余弦函数,不但在测量上容易产生误差,而且萨格纳克相移很小时,旋转速度的灵敏度 d ID/I0=-I0sin fs)接近为零。而本文所设计的陀螺仪,由于电光调制器使得逆时针和顺时针信号产生π/2相位差,输出信号功率与旋转速度呈线性关系更利于我们测量较低旋转速度。

图6 陀螺仪的灵敏度特性
为了更好的研究陀螺仪的特性,我们还研究了其他条件对于陀螺仪的影响。
对图7(a),我们研究了陀螺仪灵敏度随微环半经(Ring Radius)之间的关系。我们选取输入功率 I0=10 mW,折射率 n=3,光在真空中速度c=3×108m/s,微环谐振腔耦合系数k=0.1,同样的为了让逆时针和顺时针信号之间引入一个非互易π/2的偏置相位,对于铌酸锂电光调制器,其相应的系数为铌酸锂波导折射率n0=2.31,电光调制系数γ=32.2×10-12m/V,铌酸锂波导长度L0=200mm,我们改变其微环半经,对陀螺仪灵敏度进行仿真,仿真结果如图7(a)所示,从图中可以看出陀螺仪灵敏度与微环半经成线性比例关系,并且随着微环半经的增加而增加。
对图7(b),我们研究了微环谐振腔耦合系数k对陀螺仪灵敏度的影响。在输入功率不变,仍为I0=10mW,折射率n=3,光在真空中速度c=3×108m/s,铌酸锂的相应各系数也不变,信号波长γ=1.55×10-6m,微环半经R0=1.365×104m的条件下,选择κ=0.742、0.8、0.837、0.877、0.894等几个值,对输出功率进行仿真,仿真结果如图7(b)所示。根据图7(b)可知,随着耦合系数κ的增加,陀螺仪的输出曲线的陡峭度上升,陡峭度则代表陀螺仪的灵敏度d I/dΩ,即陀螺仪的灵敏度随着耦合系数的增加而增加。

图7 参数改变对陀螺仪灵敏度的影响
4 结束语
本文提出了一种新的基于级联微环谐振腔慢光效应的光学陀螺仪,并对其特性进行了研究。根据萨格纳克效应和耦合矩阵方程,得到了级联微环的耦合方程,并且分析了级联微环在谐振波长处所产生的慢光效应,在慢光效应的作用下,对输出信号与旋转速度进行仿真,得到陀螺仪灵敏度特性曲线。并研究了微环半径和微环耦合系数的改变对陀螺仪灵敏度的影响,仿真结果表示,陀螺仪的灵敏度分别随着微环半径的增加和耦合系数的增加而增加。
[1] 张桂才.光纤陀螺原理与技术[M].北京:国防工业出版社,2008:1-25.
[2] 李齐良,华晓峰,张爱辛,等.二芯非线性光栅耦合器的开关特性研究[J].电子器件,2011,34(4):428-431.
[3] John R E Toland,Christopher PSearch.Sagnac Groscope Using a Two-Dimensional Array of Coupled Optical Microresonators[J]. Applied Physics B(0946-2171),2013,4(3):333-339.
[4] Tebo A.高性能的光纤陀螺仪已成为现实[J].惯导与仪表,1999(2):1-7.
[5] Lamprecht H A.Base Motion Compensation for a Fiber-Optic North-Seeking Gyroscope[J].Symposium Gyro Technology(Stuttgart),1996,2(10):0-8.
[6] 叶炜,杨国光.闭环光纤陀螺铌酸锂调制信号分析[J].传感技术学报,1998(3):7-11.
[7]LeonhardtU,PiwnitskiP.Ultrahigh SensitivityofSlow-LightGyroscope[J].PhysRev A(1050-2947),2000,62(5):055801.
[8] Matsko A B,Savchenkov A A,Ilchenko V S,et al.Optical GyroscopewithWhisperingGalleryModeOpticalCavities[J].OptCommun(0030-4018),2004,233(1):107-112.
[9] Scheuer J,Yariv A.Sagnac Effect in Coupled-Resonator Slow-LightWaveguidestructures[J].Phys Rev Lett(0031-9007).2006,96(5):053901
[10]Sorrentino C,Toland J,Search C P.Ultra-Sensitive Chip Scale Sagnac Gyroscope Based on Periodically Modulated Coupling of a Coupled Resonator Optical Waveguide[J].Opt Express(1094-4087),2012,20(1):354-363.
[11]Toland JR E,Kaston Z A,Sorrentino C,etal.Chirped Area Coupled Resonator OpticalWaveguide Gyroscope[J].Opt Lett(0146-9592),2011,36(7):1221-1223.
[12]NovitskiR,Steinberg B Z,Scheuer J.Losses in Rotating Degenerate Cavities and a Coupled-Resonator Optical-Waveguide Rotation Sensor[J].PhysRev A(1050-2947),2012,85(2):023813.
[13]Morichetti F,Ferrari C,Canciamilla A,et al.The First Decade of Coupled ResonatorOpticalWaveguides:Bringing Slow Light to Applications[J].LaserPhoton Rev(1863-8880),2012,6(1):74-96.
[14]Lei Ming,Feng LiShuang,Zhi Yinzhou,et al.Current Modulation TechniqueUsed in Resonatormicro-Optic Gyro[J].Applied Optics (1559-128x),2013,52(2):307-313.
[15]WangKunbo,Feng Lishuang,Wang Junjieet,etal.AlternativeMethod for Design and Optimization of Theringresonator Used in Micro-OpticGyro[J].Applied Optics(1559-128x),2013,52(7):1481-1486.
[16]Li Junguo,Lin Qi,Bin Xing,et al.Open-Loop Experiments in a Resonator Micro Optic Gyro Using Laserfrequency Modulation[J]. Optik(0030-4026),2015,126(6):663-665.
[17]AgrawalGP.非线性光纤光学原理及应用[M].2版.贾东方,余震虹,王肇颖,等译.北京:电子工业出版社,2010:456-465.
[18]Herve C L.光纤陀螺仪[M].张桂才,王巍,译.北京:国防工业出版社,2002:9-11,15-20.
[19]李淳飞.全光开关原理[M].北京:科学出版社,2010:17-19.

李冬强(1992-),女,汉族,黑龙江省哈尔滨人,在读研究生,杭州电子科技大学,主要研究方向为光陀螺仪方面的研究,li525365463@163.com;

李齐良(1965-),男,湖南衡阳人,教授,博士后,研究生导师,杭州电子科技大学通信工程学院,主要研究方向为非线性光学,光通信技术以及激光技术与器件方面的研究,liqiliang@sina.com。
Analysis of Sensitivity of Micro-Optic Gyroscope for Cascade Coup led-Resonator Slow-Light Effect Structures*
LIDongqiang,LI Qiliang*,ZHU Mengyun,ZHANG Zhen
(School of Communication Engineering,Hangzhou DianziUniυersity,Hangzhou 310018,China)
For the sensitivity of optical gyroscope,The operation of amicro-optic gyroscope(MOG)based on slowlightwaveguide is proposed.We use the structure that consists of coupled microring resonators,according to the slow-lighteffect thatoccurs in cascaded resonator on the resonantwavelength,a larger phase difference is accumulated on the resonancewavelength,thusMOG can detecta slow angular ratewith respect to an inertial frame athigh sensitivity.And experiments show that the sensitivity ofMOG can be changed by changing themicro-resonator coupling and the radius of the ring,when themicroring radius increases from 0 to 90μm,the sensitivity increaseswith it.Similarly,the sensitivity also increaseswith an increase of the coupling coefficient,in order to optimize the sensitivity of theMOG.
micro-optic gyroscope;the slow-lighteffect;cascadedmicroring;sensitivity
V241.558
A
1005-9490(2016)04-0780-05
项目来源:浙江省自然科学基金项目(Y1110078)
2015-08-12修改日期:2015-09-18
EEACC:2630;412510.3969/j.issn.1005-9490.2016.04.006
