温跃层剖面观测水下滑翔器控制系统设计
2016-09-14王艳召孙秀军
王艳召,邓 云,孙秀军,姜 飞
(国家海洋技术中心 天津 300112)
温跃层剖面观测水下滑翔器控制系统设计
王艳召,邓 云,孙秀军,姜 飞
(国家海洋技术中心 天津 300112)
根据温跃层剖面观测水下滑翔器多任务并行处理的特性,采用意法半导体公司的高性能、低功耗的ARM Cotex-M4内核的STM32F429为主控芯片,移植嵌入式实时操作系统μC/OS-II,设计实现了温跃层剖面观测水下滑翔器的软硬件综合控制系统。实现了水下滑翔器自主运行过程中的下潜、水下悬停、上升以及海洋水文信息的采集与存储,并通过铱星通信实现温跃层剖面观测水下滑翔器的关键数据与控制命令的远程传输。同时,引入拟阶梯函数分析海洋温跃层参数特征,设计开发了温跃层剖面观测水下滑翔器综合控制算法,实现温跃层剖面观测水下滑翔器的自主滑翔运动控制、测量路径规划等功能。
水下滑翔器;实时操作系统;控制系统;拟阶梯函数;温跃层特征
水下滑翔器是一种带有固定翼的由浮力引擎驱动的水下机器人。它通过浮力调节系统来调整系统的排水量,使水下滑翔器交替出现正浮力与负浮力状态;依靠其内部的俯仰执行机构改变机身的质量分布,以改变滑翔器的运动姿态。由于其利用净浮力和俯仰角的调整来获得推进力,能源消耗极小,因此具有高机动性、高效率、续航力大等特点[1]。自1989年美国科学家Henry Stommel提出水下滑翔器的概念至今,国外已经将水下滑翔器技术应用与海洋观测、科学考察以及军事海洋任务。2006年,Washington大学研发的水下滑翔机Deepglider样机,采用碳纤维耐压壳体,潜深可达6 000 m[2]。我国对于水下滑翔器的研究开始较晚,与国外相比还有一定的差距,因此开展自主研发水下滑翔器项目对于海洋维权、科学考察、气象监测等具有重要的意义。
文中所研究的温跃层剖面测量水下滑翔器是对海洋温跃层进行有针对性测量的海洋观测平台。海洋温跃层对水下通信和声波探测有着重要的影响,将水下滑翔器应用于海洋温跃层观测,有助于提高海洋环境观测的空间和时间观测密度,对于海洋科考、环境保护以及军事海洋环境保障具有重要的意义[3]。文章以温跃层剖面测量水下滑翔器为研究对象,具体介绍了水下滑翔器的嵌入式软硬件综合控制系统与温跃层控制算法的实现方法。
1 控制系统功能组成
温跃层剖面观测水下滑翔器在执行海洋观测任务过程中,为了保证其运动姿态的精确控制,通常是由一系列的组合动作并发执行,完成运行状态的转换与姿态调整。系统采用嵌入式实时操作系统控制方案,充分发挥实时操作系统的确定性响应特性,以满足温跃层剖面观测水下滑翔器精确控制的要求。图1所示为水下滑翔器控制系统结构框图。
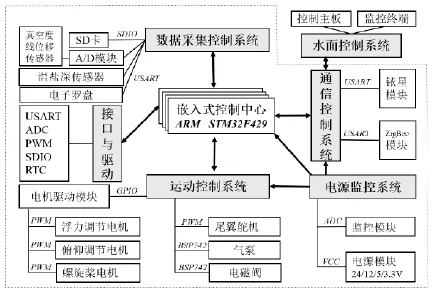
图1 水下滑翔器控制系统结构框图Fig.1 Structure diagram of underwater glider control system
系统由水面控制系统和水下控制系统两部分组成。水下控制系统由嵌入式控制中心、数据采集控制系统、通信控制系统、运动控制系统、电源监控系统以及接口与驱动构成。其中嵌入式控制中心采用ST推出的ARM Cotex-M4内核的32位微控制器STM32F429,该处理器低功耗与节能机制符合滑翔器控制系统长续航能力的需求;片上集成FPU和DSP运算指令集提高了滑翔器控制系统运算处理能力;其对嵌入式实时操作系统的支持满足了滑翔器控制系统多任务实时处理的需求。因此,选择ARM Cotex-M4内核微控制器作为水下滑翔器控制系统的嵌入式控制中心处理器,对增强水下滑翔器信息处理性能具有重要的实用意义。
2 控制系统硬件设计
2.1通信控制系统
通信控制系统包括铱星通信模块和ZigBee无线传输模块。铱星通信模块采用Iridium短报文透明传输模块,该模块具有较低的功耗,通过RS232接口与控制中心连接,通过发送相应的控制指令,实现水下滑翔器在海洋观测任务过程中的数据传输、远程控制与海洋定位。ZigBee模块采用低电压型无线传输模块,通过TTL电平的串口与控制中心连接。模块支持大数据量发送,且不限数据包长度,最高数据传输速率可达38400Bit/s。同时支持长周期和短周期的无线唤醒,可以最大限度地节约电池电量,延长使用寿命,非常适用于水下滑翔器在水面上的状态测控。在执行海洋观测任务过程中,两种通信方式优势互补,灵活使用。
2.2水面控制系统
水面控制系统主要由控制主板和监控终端组成。水上控制系统通过铱星监控终端接收铱星传回的数据以及定位信息,利用Google Earth软件模拟水下滑翔器运行轨迹,并通过命令发送终端实时发送水下滑翔器控制命令,实现对滑翔器的姿态调整与航迹修正。水面控制主板由开关模块、状态指示模块以及ZigBee无线通信模块构成,用以实现水下滑翔器的调试、布放、回收以及状态监测控制等功能。
2.3数据采集控制系统
水下滑翔器作为水下运动观测平台,根据观测任务的不同可以搭载温盐深(CTD)、溶解氧、PH值、叶绿素、放射性检测等不同类型的海洋传感器,以实现滑翔器对特定海域的环境数据的测量。本项目中温跃层剖面观测水下滑翔器搭载了温盐深(CTD)传感器,在水下滑翔器锯齿状运动过程中,可以对温跃层信息敏感区进行加密观测[4],以获得高分辨率的海洋温跃层数据,并将数据存储在大容量SD卡中。系统采用STM32微控制器的SDIO总线扩展大容量SD卡。为增强数据可读性,便于后期进行数据处理,移植了FATFS文件系统。
数据采集控制系统还包括电子罗盘传感器和A/D采集模块。其中电子罗盘传感器用来获得水下滑翔机的姿态角,A/D采集模块用以采集水下滑翔器舱内真空度、俯仰电池和油泵活塞的线位移。A/D模块采用ADI的8通道16位精度的同步采样芯片AD7606,其片上集成模拟输入箝位保护、二阶抗混叠滤波器、跟踪保持放大器、16位电荷在分配逐次逼近型ADC内核、数字滤波器、2.5 V基准电压源及缓冲、高速串行和并行接口。另外,该芯片采用5 V单电源供电,不需要正负电源,并支持正负10V的双极性信号输入,其每个通道的采样速率最高可达200ksps。高精度与高集成度的AD芯片对于实现水下滑翔器的运动姿态的精确控制尾翼气囊的充放气程度以及检验水下滑翔器的密封性具有重要的保障作用。
2.4运动控制系统
水下滑翔器的驱动力来源于自身的静浮力,系统通过控制浮力调节机构、俯仰调节机构以及辅助调节机构来周期性调整水下滑翔器的运动姿态,完成如图2示的基本动作。
系统通过电机驱动器来控制浮力调节电机、俯仰调节电机和螺旋桨电机的启动、停止和正反转,并用PWM控制电机的转速。浮力调节机构通过控制电机的转动改变柱塞的位置,来改变水下滑翔器的排水量,进而获得上升及下潜的动力。系统采用高精度拉线式位移传感器来测量柱塞移动的位移(d),通过标定有效的量程来控制滑翔器的整体浮力的变化。
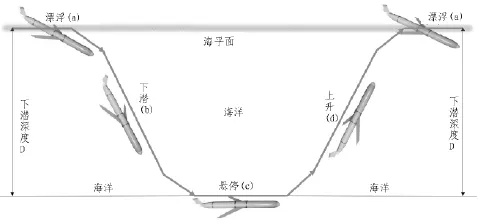
图2 水下滑翔器动作执行示意图Fig.2 Diagram of underwater glider's behavior
俯仰调节机构是通过电机带动配重块(滑动电池组)移动[5],通过改变配重的位置来改变水下滑翔器的重心位置,从而控制水下滑翔器的俯仰姿态。系统采用高精度直线位移传感器来测量配重块的移动位移(1),并采用精密电子罗盘传感器来测量水下滑翔器的俯仰角(α)。俯仰角的大小决定了水下滑翔机单周期滑翔距离的长短,俯仰角越大,其单循环滑翔距离越短。对于温跃层剖面观测水下滑翔机而言,单周期滑翔距离越短,所采集的跃层剖面信息越接近实际值。因此在温跃层分布区域,较大的俯仰角有利于温跃层数据采集的有效性。
2.5电源监控系统
由于水下滑翔器系统各模块的电压不同,为了保证电源模块与各个模块及控制系统的安全性,避免某一电源模块故障对控制系统造成不可恢复性损害,采用电源板与系统板分立式设计方案,如图3为电源监控系统设计方案框图。
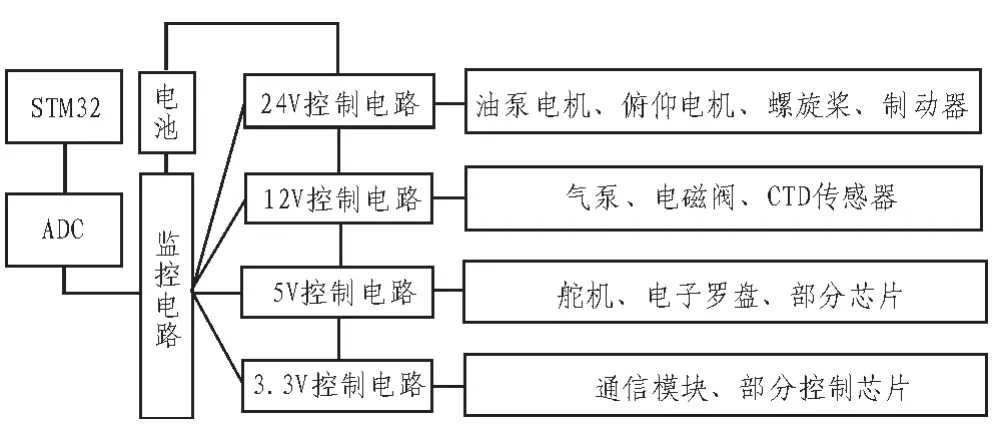
图3 电源监控系统设计方案框图Fig.3 Structure diagram of power monitoring system
安全稳定的电源模块是水下滑翔器控制系统正常工作的前提,系统采用片上集成的12位精度的ADC,通过分压电路来实时监测水下滑翔器电池组及各模块的电压值。当电量不足或者电压电路故障时,提供电量报警和故障定位服务,并实时启动应急保护措施。
3 控制系统软件设计
3.1系统算法
水下滑翔器在执行温跃层检测过程中,温跃层参数计算是实时处理的,水下滑翔器根据温跃层的参数特性,调整运行航迹和数据采样速率。在分析温跃层特征时,通常采用跃层深度、跃层强度、跃层厚度等参数来描述跃层现象[6]。根据温跃层的定义和温度垂直分布特性,将海水理想划分为上均匀层、跃层和下均匀层垂直分布结构[7],如图4所示。
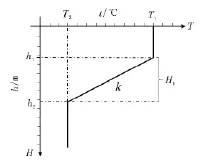
图4 温跃层垂直分布示意图Fig.4 Diagram of thermocline profile
葛人峰等[8]提出了一种用3条线段构成的拟阶梯函数拟合温跃层垂直剖面,求解温跃层特征参数的计算方法。根据图4中标示的参数得到如下计算公式。
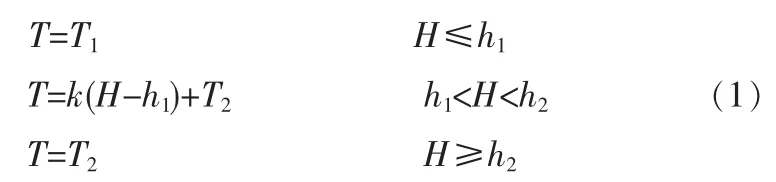
式中T为拟合温度值;H为下潜深度;h1为温跃层上界深度;h2为温跃层下界深度;T1为上均匀层平均温度;T2为下均匀层平均温度;k为跃层强度,易知温跃层厚度H0=h2-h1。然后用最小二乘法确定(1)式中的跃层上下界参数h1和h2以及跃层强度k,即使其均方差达到最小,计算如下式所示。

式中T为实际测得的温度,T′为由式 (1)计算得到的温度,n为层数。在上述理论的基础上,可以得出水下滑翔器的下潜深度D、俯仰角α及其所搭载的海洋探测传感器的采样频率fsensor与温跃层参数之间的函数关系,如下式所示,
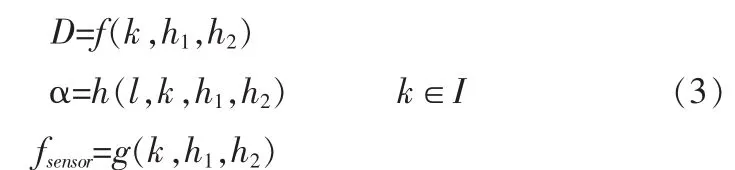
其中I为探测水域的温跃层强度范围。根据上述理论水下滑翔器在执行海洋温跃层检测跟踪时的控制算法如下。1)第一个运动周期采用较大的俯仰角航行,以获得较大范围的海洋水文信息;2)第二个运动周期及以后下潜深度D随温跃层下界深度变化而做出调整;3)通过增大水下滑翔器的俯仰α来增大温跃层水域的观测密度;4)通过调整海洋传感器的采样频率fsensor来加强对温跃层信息的观测。算法指导下水下滑翔器航行示意如图5所示。
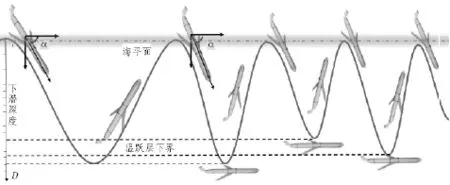
图5 水下滑翔器航行示意图Fig.5 Diagram of underwater glider navigation
3.2软件框架
控制系统的软件架构基于嵌入式实时操作系统μC/OSII,按照温跃层剖面观测水下滑翔器多任务处理特性设计的。图6为滑翔器水下控制系统整体软件结构框图。
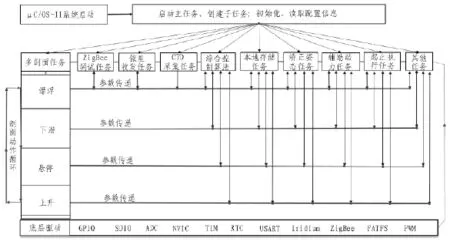
图6 控制系统整体软件结构框图Fig.6 Structure diagram of underwater glider software control system
其工作流程如下所述:温跃层剖面观测水下滑翔器布放完成后的状态是漂浮在水面上,N剖面任务命令下达后,水下滑翔器的尾翼气囊收缩,同时俯仰调节机构和浮力调节机构调整水下滑翔机姿态为下潜状态;在发现温跃层后,调整海洋传感器的采样频率,以获得可靠的温跃层特性参数,并实时存储。在完成第一个滑翔周期的温跃层信息采集后,水下滑翔器在短暂的悬停状态后调整为上升状态。在接近水面时,气囊充气以保证水下滑翔器尾部高高翘起,使得安装在尾翼的通信设备通过卫星与远程控制终端建立通信连接,实时发送运行的关键信息,并接收远程任务指令,结合温跃层控制算法继续航行,直至完成海洋观测任务。
4 实验结果
为了测试该控制系统的性能,将搭载该控制系统的温跃层剖面观测水下滑翔器布放在渤海近海岸海域,并设定剖面数N=18。图7(a)中所示为温跃层剖面观测水下滑翔器航行深度随时间的变化曲线图,由图中曲线可以看出水下滑翔器下潜深度为5~6 m,在完成了18个剖面动作后漂浮在水面上。图7(b)中所示为温跃层剖面观测水下滑翔器俯仰角随时间的变化曲线图,从图中可以看出水下滑翔器的俯仰角度范围在正负40度之间变化,实验表明温跃层剖面观测水下滑翔器测试性能良好,具备进一步开发研究的价值。
5 结 论
文中研究了基于意法半导体公司的ARM 32位微控制器STM32F429的嵌入式温跃层剖面观测水下滑翔器控制系统,通过分析温跃层特性设计了水下滑翔器温跃层剖面观测控制算法。本文具有以下4个创新点:1)采用高性能、高集成度、低功耗的微控制器作为系统的控制核心,大大增强了水下滑翔器系统的运算处理能力;2)移植嵌入式微型实时操作系统μC/OS-II,实现了复杂多任务的并行处理,提高了系统任务的执行效率与水下滑翔器的综合性能;3)采用模块化设计理念设计系统的软硬件,合理分配资源与空间,提高了系统软硬件的灵活性与可继承性能;4)引入温跃层参数计算算法,设计水下滑翔器温跃层剖面观测控制算法,增强了水下滑翔机的海洋环境信息的观测能力。
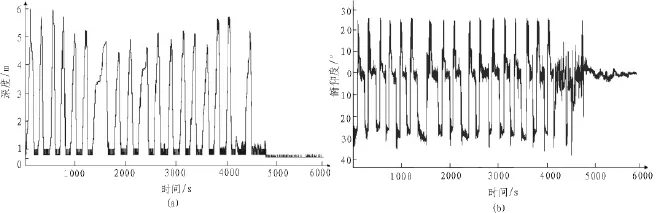
图7 滑翔器航行深度和俯仰角随时间变化图Fig.7 Diagram of underwater glider depth&pitching angle changes with time
[1]毕道明,李硕,崔建成,等.水下滑翔机器人控制系统设计与实现[J].微计算机信息,2006,22(11-1):18-20.
[2]Osse T J,Eriksen C C.The deepglider:a full ocean depth glider for oceanographic research[C]//OCEANS2007 IEEE, 2007:1-12.
[3]Yuh J.Design and control of autonomous underwater robots [R].Autonomous Robots,2000.
[4]刘建,李冬冬,冀大雄.AUV海洋温跃层检测方法综述[J].海洋技术学报,2014,33(5):127-135.
[5]秦玉峰.温跃层剖面测量水下滑翔器结构设计 [D].天津:天津城建大学,2013.
[6]郝佳佳,陈永利,王凡.中国近海温跃层判定方法的研究[J].海洋科学,2008,32(12):17-24.
[7]张旭,张永刚,聂邦胜,等.垂直梯度法与最优分割法确定温跃层边界的比较分析[J].海洋通报,2008,27(6):20-26.[8]葛人峰,乔方利,于非,等.陆架海温跃层特征量的一种计算方法-拟阶梯函数逼近法 [J].海洋科学进展,2003,21 (4):393-400.
Design of underwater glider control system for the thermocline profile survey
WANG Yan-zhao,DENG Yun,SUN Xiu-jun,JIANG Fei
(National Ocean Technology Center,Tianjin 300112,China)
Based on the observation of underwater gliders multitasking thermocline profile characteristics of the parallel processing,the project in this paper uses STM32F429 which has high performance and low power consumption as the core ship in this control system,the design has realized the thermocline profile observation software and hardware integrated control system of underwater glider for autonomous operation in the process of the underwater glider diving,underwater hovering,rise and marine hydrology information acquisition and storage.And through the iridium communications thermocline profile observation of the underwater glider key remote transmission of data and control commands.Introducing quasi-step function approximation method to develop the thermocline profile observation of underwater gliders integrated control algorithm,realizing of thermocline profile independent observation of the underwater glider gliding motion control and measurement path planning.
underwater glider;RTOS;control system;thermocline;quasi-step function approximation method
TN709
A
1674-6236(2016)02-0149-05
2015-04-11稿件编号:201504113
2014年海洋公益性行业科研专项(201405006)
王艳召(1988—),男,河北衡水人,硕士研究生。研究方向:嵌入式系统设计、智能传感技术研究。