混合动力动车组网络监控分析与实现
2016-09-14李淑英邱瑞昌席海阔
李淑英,邱瑞昌,杨 春,席海阔
(北京交通大学 电气工程学院 北京市轨道交通电气工程技术研究中心,北京 100044)
混合动力动车组网络监控分析与实现
李淑英,邱瑞昌,杨 春,席海阔
(北京交通大学 电气工程学院 北京市轨道交通电气工程技术研究中心,北京100044)
混合动力动车组是集成了两种不同动力源的动车组,可以根据运营路线及运营环境的变化改变其动力提供方式。针对混合动力动车组的结构特点设计了网络监控系统,该系统以TI公司推出的数字处理器DSP28335为底层设备,建立动车组列车网关与列车牵引系统之间网络通信,利用LabVIEW语言开发上位机监控系统,实现了对牵引系统的综合网络监控。
混合动力动车组;DSP;LabVIEW;网络监控
混合动力动车组是具有不同动力输入的动车组,其中一种为 “25 kV接触网供电+内燃动力包供电+锂电池供电”,简称DEMU;另一种为“25 kV接触网供电+锂电池供电”,简称EEMU。混合动力动车组结构复杂,在调试运行阶段,需要采用实时性强、运行稳定性高的综合监控系统进行监控。包括内燃动力包、锂电池、牵引电机等各个系统的温度值、接触器开关状态、故障状态等参数的观测,实时波形数据的采集,与中央管理单元(CCU)的通信数据交互等功能。
基于混合动力动车组结构的特殊性,文中在综合分析其特点的基础上以DEMU牵引系统为对象提出一种监控方法。该方法在传统的仪表测量方式上实现创新,避免了由传统仪表测量方法产生的影响,例如危及操作人员的人身安全、测试过程繁琐程序复杂等。综合监控技术具有强大的采集、判断及运算能力,实现了将网关实时通信、运行状态监控、波形显示以及故障下载分析等多功能集于一体。
1 系统整体架构分析
混合动力动车组编组方式为2动1拖(M+T+M),图1所示为DEMU拓扑结构,系统主要分为5大部分,分别为接触网部分(包括受电弓和变压器)、动力包部分(包括柴油发电机PP和锂电池及双向DC/DC设备BDC)四象限变流器(LC)、牵引变流系统(MC)以及辅助逆变器(APS)。
控制箱是将几大部分的控制板及调理电路集成一体的装置,为实现各部分的监控,需要在控制箱中安装监控子系统和主控子系统。主控子系统主要完成相应电气设备的控制,监控子系统主要完成对应系统的实时监控及与中央控制单元的数据通信。本文以牵引系统控制箱(包括柴油动力包PP、四象限变流器LC、牵引变流器MC、锂电池组及双向DC/ DC控制器BDC)为例,主要分析设计监控系统的上位机界面及下位机控制器,整个网络监控系统结构如图2所示,综合监控系统下位机控制器实现与3个主控板(LC、MC、BDC)的CAN通信,同时与列车485网关通信,采集调理电路信号,并使用以太网将底层数据传输至上位机界面,上位机界面采用LabVIEW语言编写,通过以太网协议监控下位机实时状态。
2 监控系统下位机分析设计
2.1下位机系统总体硬件设计
监控系统作为车辆网关与底层主控系统通信的桥梁,不仅完成与车辆网关的实时数据通信,还需要为调试人员提供车辆各个相关设备的实时信息,包括波形数据采集、故障存储等工作,而下位机作为核心控制设备,因此,结构合理的下位机设计尤为重要。如图3所示为针对混合动力动车组牵引系统所设计的监控系统硬件控制结构。

图1 混合动力动车组拓扑结构Fig.1 Topology structure of DEMU

图2 网络监控系统结构图Fig.2 The structure of network monitoring system
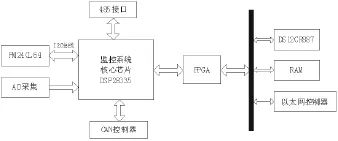
图3 网络监控系统硬件设计图Fig.3 Hardware design of network monitoring and control system
本监控系统底层核心芯片采用了TI公司推出的DSP28335微处理器。DSP28335是一种高性能的32位CPU,其处理功能强大,片上外设丰富[1]。DSP28338提供3个SCI模块,为监控板与车辆485网关通信提供接口。同时,芯片内部集成的增强型CAN模块,与CAN2.0B标准完全兼容,有效保证监控板与另外3个控制板之间的数据通信。
实时时钟芯片DS12CR887的作用是为系统提供时间,记录列车运行过程中故障发生的时间。FM24CL64是基于I2C总线的外设铁电存储器,其容量为64K,当系统发生故障时,FM24CL64将故障代码及时间点存入芯片,供调试人员分析和研究。以太网芯片控制器采用SMSC公司生产的LAN91C111,该芯片是专门应用于嵌入式应用系统的第三代快速以太网控制器,支持 IEEE802.3/802.u-100Base-Tx/ 10Base-T规范,具有可编程、CRC校验、同步或异步工作方式,且具有低功耗CMOS设计和小尺寸等特点,是设计嵌入式以太网网络接口的良好选择[2]。控制板数据及485网关数据通过以太网传输到上位机界面,同时上位机界面参数也可以通过以太网控制参数运行。FPGA即现场可编程门阵列,其作用是为时钟芯片、RAM、以太网提供时序。
2.2下位机软件设计
整个系统的软件设计包括数据采集、故障判断、数据交互和以太网传输等部分,在主程序设计时需要综合考虑任务调度问题,将任务分成几个模块进行设计。
在485通信和CAN通信主要完成与相应系统之间的数据传输,定时判断是否接收到新数据,如果出现计数10次以上无通信数据,则系统将重新启动相应功能。监控板通过判断CAN传输数据中的故障代码确定控制系统是否出现故障,如果出现故障,则获取时钟芯片的实时时间,将故障代码及时间组合成故障信息保存在I2C外设电铁存储芯存储器FM24CL64中。波形采集采用2K频率,将采集到的波形数据按照堆栈形式存入波形数组,和网络传输常规数据进行整合,通过以太网通信模块传输到上位机监控界面。以太网传输协议采用简洁性较高的UDP协议,每帧最多可传输1478字节。整个程序流程图如图4所示。
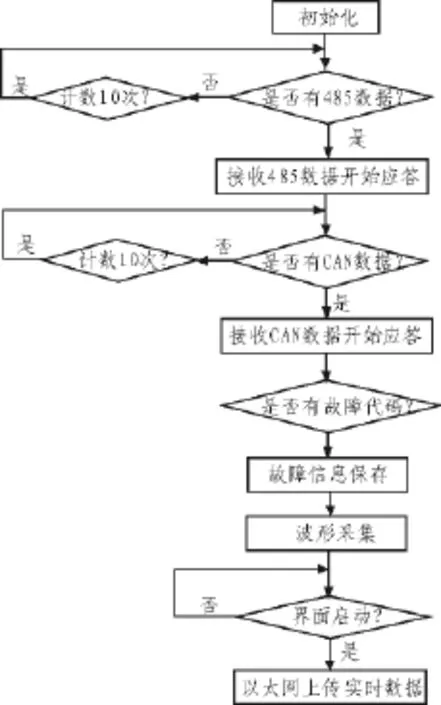
图4 下位机软件流程图Fig.4 Software flow pattern of lower system
为了使系统外部扩展芯片正常工作,监控系统中的FPGA需要对其进行时序控制,为外设映射分配扩展区域地址空间。DSP2833x系列的XINTF的3个区域都具有独立的片选信号,当一个区域被访问时,相应地片选信号首先被拉到低电平[3]。本系统中的各个外设均映射到外部扩展区域0中,各地址映射区域如表1所示。

表1 外设芯片映射地址Tab.1 Peripheral chip map
3 上位机设计
3.1LabVIEW监控界面分析
基于LabVIEW语言的监控界面通过以太网与下层监控板进行通信,由于系统复杂程度高,数据量庞大,文中对监控界面提出以下几个方面要求。
1)数据通信量齐全:监控界面必须实时刷新底层设备的所有关键数据,反映设备状态,以便调试人员作出合理的控制策略和及时的故障判断[4]。
2)通信可靠性高:由于控制系统操作的对象大部分为高压设备,必须保证监控系统稳定可靠,避免突发的事故。
3)实时波形数据:监控界面除了能反应系统数字量和模拟量之外,还必须能实时体现电流电压量波形。
4)操作简单:监控界面应该避免繁琐的操作程序,以简单易实现为目的,方便现场操作。
3.2LabVIEW监控界面设计
根据以上要求,文中采用LabVIEW语言设计了功能较为齐全的监控界面,其功能结构如图5所示。
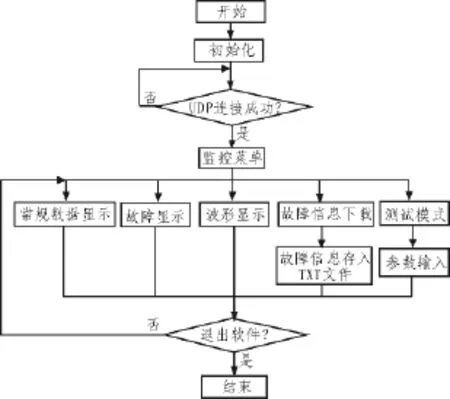
图5 监控界面软件流程图Fig.5 Software flow pattern of monitoring interface
监控主界面主要包括常规数据显示、故障显示、波形显示、故障下载和测试模式几个部分[5]。进入监控界面后,启动监控系统,监控板将以0.5 s/帧的速率向界面发送常规数据,包括所有相关的数字量和模拟量。打开波形显示功能,界面将AD采集的波形数据包分线程处理,反映到虚拟示波器上。在系统调试阶段,调试人员可以使用测试模式,将参数打包通过以太网发送至监控板,监控板启用CAN模式功能将参数指令转发到各控制板中。由于在调试的过程中,监控板已经将故障信息存入I2C外设电铁存储芯片FM24CL64中,若要查看已经缓存的故障信息,只需启用故障信息下载功能,故障信息即从缓存芯片中读取出来,上传至界面,并以TXT文本形式保存在PC机中[6]。
4 实验调试结果
1)常规数据如图6所示。
2)故障显示如图7所示。
3)故障下载如图8所示。
4)测试模式如图9所示。
5 结束语
文中介绍了混合动力动车组牵引系统网络监控分析与设计过程,经过在实际装置上的调试运用,监控系统底层工作稳定,通信可靠性高,上位机界面友好、软件性能强、运行速度快、波形显示实时性能良好。采用以太网传输机制,实现远程监控,相对于采用测量方式及示波器安装操作等繁琐过程,本文所提出的监控系统结构简单、易于操作、且实时性能良好,对轨道交通车辆网络监控有重要借鉴意义。

图6 常规数据Fig.6 Routine data
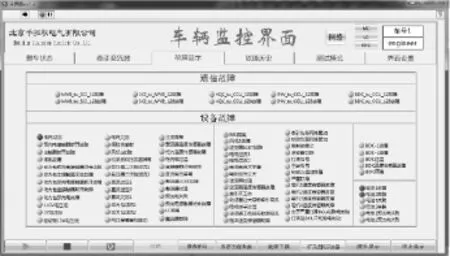
图7 故障显示Fig.7 Faults display
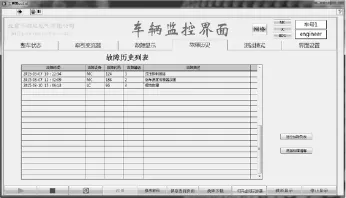
图8 故障下载Fig.8 Download faults
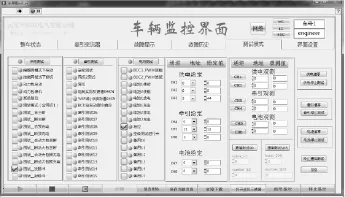
图9 测试模式Fig.9 Test pattern
[1]符晓,朱洪顺.TMS320F2833xDSP应用开发与实践[M].北京:北京航空航天大学出版社,2013.
[2]胡俐蕊.嵌入式以太网控制器LAN91C111及其应用[J].微计算机信息,2005(5).
[3]刘陵顺,高艳丽.TMS320F28335DSP原理及开发编程[M].北京:北京航空航天大学出版社,2011.
[4]吴佐民.新型能馈式牵引供电系统嵌入式监控平台设计[J].机械与电子,2010(9):34-37.
[5]徐硕.基于LABVIEW的能馈式牵引供电装置监控软件开发[J].电子设计工程,2013,21(14):30-34.
[6]刘君华,郭会军,赵向阳,等.基于LabVlEW的虚拟仪器设计[M].北京:电子工业出版社,2003.
The analysis and implementation of DEMU network monitoring
LI Shu-ying,QIU Rui-chang,YANG Chun,XI Hai-kuo
(Beijing Engineering Research Center of Electric Rail Transportation,The School of Electrical Engineering,Beijing Jiaotong University,Beijing 100044,China)
DEMU is integrated with two different power,It can change its power providing way according to the change of power line and operation environment.According to the structural characteristics of DEMU this paper design a network monitoring system,this system uses TI company's digital processor DSP28335 as the underlying equipment,establish network communication system between train gateway and train traction system,apply LabVIEW language to develop the upper computer monitoring system,realizes the comprehensive monitoring of DEMU.
DEMU;DSP;LabVIEW;network monitoring system
TP274
A
1674-6236(2016)01-0117-04
2015-04-10稿件编号:201504111
国家科技支撑计划项目(2013BAG21Q00);国家自然科学基金(U1134204,51307006)
李淑英(1989—),女,广西南宁人,硕士研究生。研究方向:车辆通信与监控技术。