基于扩展卡尔曼滤波的人体行为识别算法
2016-09-14任子良黎志雄
任子良,秦 勇,黎志雄
(东莞理工学院 计算机学院,广东 东莞 523808)
基于扩展卡尔曼滤波的人体行为识别算法
任子良,秦 勇,黎志雄
(东莞理工学院 计算机学院,广东 东莞523808)
针对人体行为事件,研究了多传感器数据采集模型和扩展卡尔曼滤波优化算法的应用。系统将加速度传感器分量数据映射为三维加速度空间,并与压力传感器数据结合建立四维实时数据采集空间。基于系统的模型特征,提出了非线性系统下的扩展卡尔曼滤波算法。系统利用优化算法对数据实现最优估计,并依据传感器信噪比对优化数据进一步修正,之后在系统设定的传感器信任级别和融合权重的基础上完成人体行为识别。实验结果表明,本文算法可以提高数据空间的精度和平滑度,可对人体行为进行有效识别。
传感器数据;人体行为;扩展卡尔曼滤波;优化算法;加权融合
最优状态估计方法被广泛应用于参数估计、系统控制、数据融合等领域。卡尔曼滤波(Kalman Filter)作为最优状态估计的常用无偏估计方法,可以有效处理线性系统问题。对于弱非线性系统问题,可将系统线性化后再进行卡尔曼优化处理。
日常生活中,人体活动的行为可描述为静止、走路、跑步、跳跃和跌倒等。针对人体行为的识别,常用方法有基于人体点模型匹配方法和基于状态空间的识别方法等。而所有方法均需要对系统参数或采集的数据进行优化估计处理,以降低系统噪声干扰和提高系统估计精度,达到提高系统整体可靠性的目的。
本文建立了弱非线性系统模型,提出了扩展卡尔曼滤波和信任级别权重融合相结合的算法来对人体行为进行识别。所采用的扩展卡尔曼滤波算法(Extended Kalman Filter)对数据空间进行二阶优化估计可达到二阶精度。算法先将系统模型的观测方程做线性化处理,应用扩展卡尔曼滤波优化算法处理实时数据,并以数据协方差来修正,进一步在传感器信任级别的基础上进行权重融合和人体行为识别。
1 系统模型
本文系统采用三轴加速度传感器和压力传感器采集人体行为数据,可映射为一非线性二阶离散系统。
依据加速度基本物理原理,将人体行为中的矢量加速度以g=9.8 m/s2为单位映射到三维加速度空间,其三维方向上分量分别为Gx、Gy和Gz如图1所示。压力传感器采集人体压力数据F,与加速度矢量一并构成系统模型所需的四维状态数据空间(Gx,Gy,Gz,F)T。
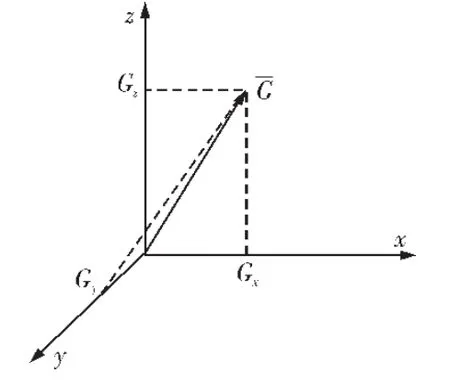
图1 三维加速度空间映射图Fig.1 Three-dimensional acceleration space mapping
系统建模为如下二阶非线性离散系统,包括过程方程和非线性观测方程:

其中,Xk=(Gx,Gy,Gz,F)T为系统采集的离散数据向量,wk为数据向量所对应的过程噪声,vk为对应的系统测量噪声,Ak为单位系数矩阵,h(Xk)为系统的二阶、多参数非线性映射。通过求h(Xk)的雅克比矩阵得出系统的线性化系数矩阵Hk。
根据EKF算法,得到系统模型的过程方程和线性化观测方程为:
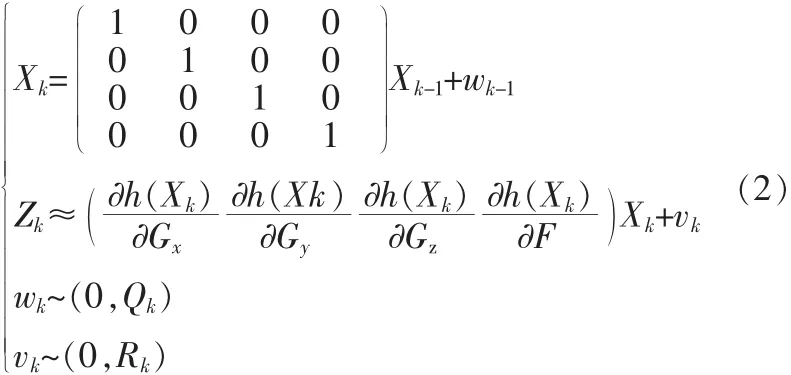
其中k为数据离散采集时间步长,wk~(0,Qk)和vk~(0,Rk)表示过程噪声和观测噪声,协方差矩阵分别为Qk和Rk。
2 算法建模
根据系统模型对四维矢量数据采集和处理的需要,本文设计算法流程如图2所示。
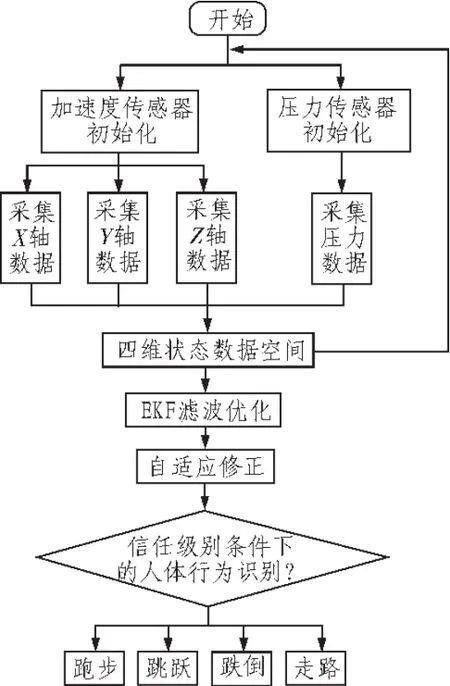
图2 人体行为识别流程图Fig.2 Flow chart of human action recognition
算法处理步骤如下:
1)系统依据传感器特性分别对采集数据的加速度传感器和压力传感器进行数据空间的初始化。
2)加速度传感器和压力传感器分别循环采集离散数据,构成四维矢量数据并输出。系统根据采集的四维矢量数据和采样频率,分别设置迭代次数为600次和迭代步长为0.02 s。
传统青花本身就是当时社会文化的具体反应,它对现实的写照,是客观存在的。因此每一件青花瓷器物的产生,它的背景都蕴含着深厚的历史文化及审美。作为人类的精神产物,它上面的总总反应,如题材,绘制技法都是不可磨灭的。因此,我们在用现代青花进行创作时候绝不能一味否定过去,而是应该带着历史发展的眼光对待。
3)扩展卡尔曼优化算法处理数据空间矢量值,得到优化估计值。分别对系统进行时间更新和量测更新。
①时间更新

②线性化测量方程系数矩阵,得到测量更新的近似线性系数矩阵Hk。

③量测更新
其中,Kk和Rk分别表示卡尔曼增益矩阵和量测噪声矩阵,其噪声与Qk同样由传感器信噪比SNR=40 dB给出。系统所采集的离散矢量数据不断迭代优化,以得到量测更新值即收敛于实际值的优化估计值。
4)依据传感数据的信噪比和噪声协方差矩阵对数据进行加权修正。

则对EKF迭代优化值修正为:

5)依据各传感器信任级别和融合权重进行人体行为识别。
根据人体行为识别的有效性和对采集数据矢量分量的依赖程度,设置数据空间各分量的信任级别为A、B、C、D,对应的权重分别为P(A)、P(B)、P(C)、P(D),且P(A)+P(B)+P(C)+P(D)=1,得到系统识别人体行为的最终判别数据为:

3 系统实验与分析
系统模型以k=0.02 s为时间步长,离散采集走路、跑步、跳跃和跌倒等人体行为数据。在对采集到的数据EKF仿真过程中,分别对每种行为数据截取150组数据来迭代优化和修正,数据对比如图3所示。
从图3可知,人体行为中走路的X轴、Y轴和Z轴加速度分量值取值区间为[0,0.8]、[-0.3,0.38]和[0.1,0.8],跑步分量取值区间为[-0.5,0.5]、[-0.2,0.7]和[-0.1,1.3],跳跃分量取区间为[-0.5,0.7]、[-0.1,0.5]和[0,1.7],跌倒分量取值区间为[-0.1,1.7]、[-0.2,1]和[-0.1,1.3]。因为压力数据只有当跌倒时才为零,因此截取跑步行为数据如图3(d)所示。

图3 人体行为加速度仿真图Fig.3 Acceleration of human action simulation
通过对比各种人体行为的取值范围和频率可知,跑步和跳跃的取值大小近似,跳跃有两次数据显著变化,跌倒数据有一次显著变化且跌倒后压力数据为零。系统通过式(9)计算R值,并依据给定的阈值范围进行人体行为识别。
表1为本文走路、跑步、跳跃与跌倒各实验50次的人体行为识别情况:
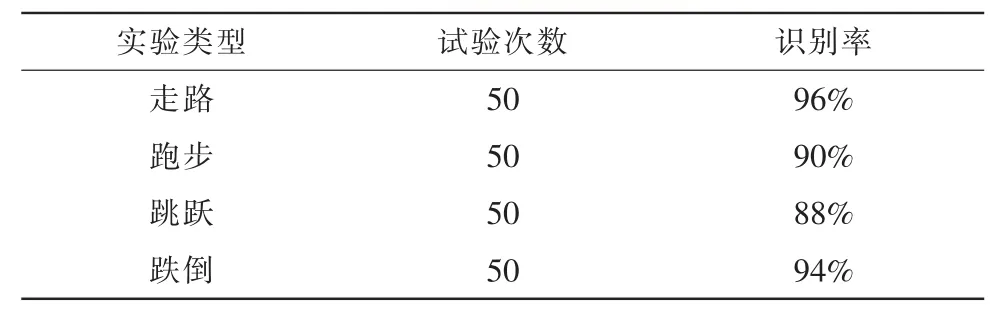
表1 实验结果Tab.1 Test result of experiment
实验中,走路速度加快后将产生跑步误判,跑步速度加快会被误识别为跳跃;若跳跃幅度小则会产生跌倒误判或者跑步误判,而跌倒速度大将产生跳跃误判,实验结果与常识相符。
4 结束语
本文基于人体行为建立四维数据采集空间模型,给出了非线性系统下的过程状态方程和测量方程。根据传感器信噪比和信任级别针对此模型提出了有效的人体行为识别算法。实验结果表明,系统算法可对数据的进行有效处理,数据处理后更加平滑和准确,可对人体行为进行有效识别。在系统识别过程中对鲁棒性影响较大的数据将出现在跳跃、跌倒等加速度数据变化近似的行为中,当走路、跑步、跳跃和跌倒速度变化过大时,将产生系统误判。如何进一步提高系统稳定性和扩展对人体其他行为的识别是下一步研究重点。
[1]甘玲,陈頫.人体行为分析方法的研究与仿真[J].计算机仿真,2013,9(30):419-423.
[2]杨宏,吴旭光.卡尔曼滤波算法在多传感器融合技术中的应用[J].弹箭与制导学报,2009,5(29):251-254.
[3]谷军霞,丁晓青,王生进.基于人体行为3D模型的2D行为识别[J].自动化学报,2010,1(36):46-53.
[4]梁丁文,袁磊,蔡之华,等.基于无迹卡尔曼滤波传感器信息融合的车辆导航算法[J].计算机应用,2013,33(12):3444-3448.
[5]石欣,熊庆宇,雷珞宁.基于压力传感器的跌倒检测研究[J].仪器仪表学报,2010,31(3):66-70.
[6]D M Karantonis,M R Narayanan,M Mathie,etal.Implementation of a real-time human movement classifier using a 3-axial accelerometer for ambulatory monitoring[J].IEEE Transactions on Information Technology in Biomedicine,2006,10 (1):156-167.
[7]赵海勇,李程友.基于多特征融合的运动人体行为识别[J].计算机应用研究,2012,29(08)3169-3172.
[8]M N Nyan,Francis E H TAY,M Manimaran,etal.Garmentbased detection of falls and activities of daily living using 3 axis MEMS accelerometer[J].Journal of Physics:Conference Series,2006(34):1059-1067.
[9]Mebekse Aydin,Metin Gokasan,Seta Bogosyan.Fuzzy based parameter tuning of EKF observers for sensorless control of induction motors[J].IEEE SPEEDAM,2014(10):174-1179.
[10]WANG Xingbo,WANG Xiaotao,ZHANG Huanshui.Target tracking in wireless sensor networks using sequential implementation of the extended kalman filter[J].IEEE Chinese Automation Congress(CAC),2013:132-137.
Activity events recognition algorithm based on extended Kalman filter
REN Zi-liang,QIN Yong,LI Zhi-xiong
(School of Computer,Dongguan University of Technology,Dongguan523808,China)
By studying the model of multi-sensor data acquisition and Kalman filter,a new nonlinear algorithm for human action recognition is proposed in this paper.The acceleration sensor data is mapping to a three-dimensional space,which combined with pressure sensor data to form the four-dimensional data space.Then,the extended Kalman filter is used to process the combined data and revise the processed data.After that,system identifies human action based on trust level and weight fusion.The simulation results demonstrated that the algorithm can improve the accuracy of the sensor and effective identify the human action.
sensors data;human action;extended Kalman filter;optimization algorithm;weight fusion
TN911.23
A
1674-6236(2016)02-0015-03
2015-04-07稿件编号:201504056
广东省教育厅科技创新项目(2013KJCX0178);东莞市科技计划项目基金(2012108102007)
任子良(1984—),男,河南汝州人,硕士。研究方向:传感器网络、信号重构与盲源分离。