国外声呐技术研究现状与发展趋势
2016-09-13赵培聪
赵培聪
(海军驻南京地区电子设备军事代表室, 南京 210039)
·总体工程·
国外声呐技术研究现状与发展趋势
赵培聪
(海军驻南京地区电子设备军事代表室,南京 210039)
概述了声呐从诞生至今的发展变化,总结了国外现役主战声呐装备型号、体制、使用国家和平台。从多功能一体、阵列构型、多基地协同、开放式体系架构四个层面分析了国外声呐技术研究现状。结合任务需求和基础技术支撑,从全自适应智能化认知、MIMO声呐、广域异质多传感器联合感知三个维度展望了声呐技术的发展趋势。
声呐;多功能;共形;多基地;开放式架构;认知;MIMO声呐;协同探测
0 引 言
声呐应水下目标预警探测而生,因目标演变、环境变化和任务多元而不断发展。从潜艇探测到鱼雷、水雷探测,从主动测量到主被动联合探测,从中频到高频和低频,从机械扫描到相控阵,从平面阵到线列阵和共形阵,从常规脉冲到脉冲压缩、单脉冲、合成孔径、逆合成孔径,从舰载到艇载、机载,从单基地到双、多基地,从单独作战到分布式组网,从预警监视到定位识别、跟踪火控、测深规避、通信导航、水声对抗,从声感知到雷达、激光、磁异探测异质联合,从军用到民用,声呐技术装备不断演进。随着美国重返亚太、第三次抵消战略、南海竞争形势的发展和空海一体战水下信息感知的作战需求,声呐技术和装备将持续受到高度关注。同时,在人工智能、信号处理和工艺材料等基础能力的推动和认知、MIMO等新型体系架构方式的牵引下,声呐系统将在功能和性能领域不断拓展。
1 国外现役主战声呐
第一代声呐从第二次世界大战到20世纪50年代末,是艇首阵中频声呐;第二代声呐诞生于20世纪60年代,以低频主被动拖曳阵声呐为代表(图1);第三代声呐出现在20世纪70年代,以数字技术和大孔径舷侧阵使用为标志;第四代声呐从20世纪80年代末开始,以多阵列多频段探测信息综合处理和一体应用为主要特征。近年来,随着对大区域水下目标探测需求的不断增大和无人反潜技术的发展,开始出现第五代多功能无人操作声呐,典型代表是美国雷声公司为DARPA反潜持续跟踪无人艇(ACTUV)项目开发的模块化可缩放声呐系统(MS3),如图2所示。其中,第三代和第四代是当前海军强国主战水下作战信息保障装备。表1列出了各国的主战声呐装备。
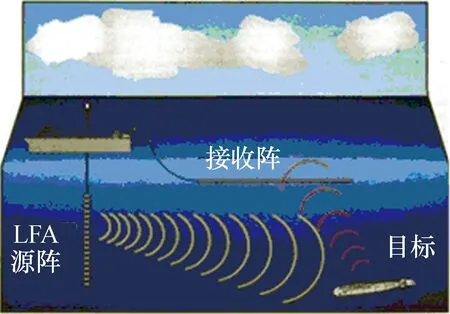
图1 美“无暇”级反潜监视船主被动声呐系统
2 国外声呐技术研究现状
2.1集主/被动、多频段、多功能于一体
现代数字信号处理算法和计算机技术的发展显著提高了声呐的信息处理能力,开放式、标准化、模块化系统架构促进了声呐新技术的快速嵌入,推动声呐系统功能集成度不断提高。新一代声呐系统综合集成舷侧、艏端、拖曳、主/被动、多频段声呐于一体,兼具目标探测、跟踪、识别,水文侦查,水下通信、导航,信息综合处理和显示,鱼雷控制,水声对抗等多种功能,大幅提高了潜艇和水面舰艇在深海和浅海中的探测性能和信息作战能力[1]。
美国AN/BQQ-10型综合声呐系统包括艇首大型球形主/被动声呐、高频主动声呐、WAA宽孔径阵列声呐,以及由TB-16粗线阵和TB-29A细长线阵组成的低频拖曳线阵列声呐,各传感器数据经过光纤通道标准(FCS)技术分配给处理硬件,具有优异的处理、通信能力和操作性,极大地提高了潜艇在浅水和高噪声背景中探测和定位目标的能力。德国214型潜艇中对各种水声设备进行了高度集成,形成综合探测、指控和武器接口系统(ISUS 90),包括被动测距声呐、宽带主动声呐、侦查探测和测距声呐、艏端柱状阵声呐、头部避雷声呐、舷侧声呐、拖曳声呐以及多功能处理控制系统。各声呐采用了数字化基阵技术,能够进行声信号的自动检测、可疑目标的自动跟踪、噪声信号和脉冲数据的交互分类识别以及潜艇自噪声的连续监测分析,在多个基阵数据处理基础上进行目标运动分析。英国“机敏”级攻击核潜艇上装备的2076型声呐包括艇首共形阵、拖曳线列阵、侦查阵、避碰声呐、舷侧阵以及处理设备,具有主被动目标探测、跟踪、识别、定位、通信、导航、侦查等多种功能。雷声公司为澳大利亚海军设计的“科林斯”级潜艇上使用的AN/BYG-1(V)系统也使用了综合声呐系统(见图3),包括舷侧声呐、艏端柱状阵声呐、被动探测声呐、侦查声呐、拖曳声呐、猎雷和避碰声呐、白噪声监测仪等。
图3 雷声公司为澳大利亚研制的AN/BYG-1(V)潜艇一体化声呐系统
2.2低频、大功率、共形阵和自适应基阵处理
低频、大功率、大孔径声呐是提高静音潜艇探测灵敏度和作用距离的最直接方式,而环境自适应基阵信号高速处理则是降低杂波干扰的有效途径,二者的结合对提高声呐的平台适装性、战场感知效能和水下对抗能力具有重要影响。
潜用共形阵阵列沿艇体安装,外形与艇型一致,具有基阵孔径大、三维空间增益高等优势,能够实现全向监视。俄罗斯的阿穆尔级(见图4)、英国的“机敏”级和美国的“弗吉尼亚”级都致力于开发艏端大孔径共形阵声呐[2]。随着大孔径、共形阵的发展,各种宽孔径高密度信号处理算法得到发展,已经具备多路径、多模态声传播解算能力,并综合应用于多线列拖曳阵、大型海底基阵网络和垂直基阵帘。声呐信号处理已从最初采用简单波束形成技术到现在普遍采用复杂全相参、宽带匹配场处理技术等实时环境自适应处理技术,有效克服海洋环境对声呐装备的影响。
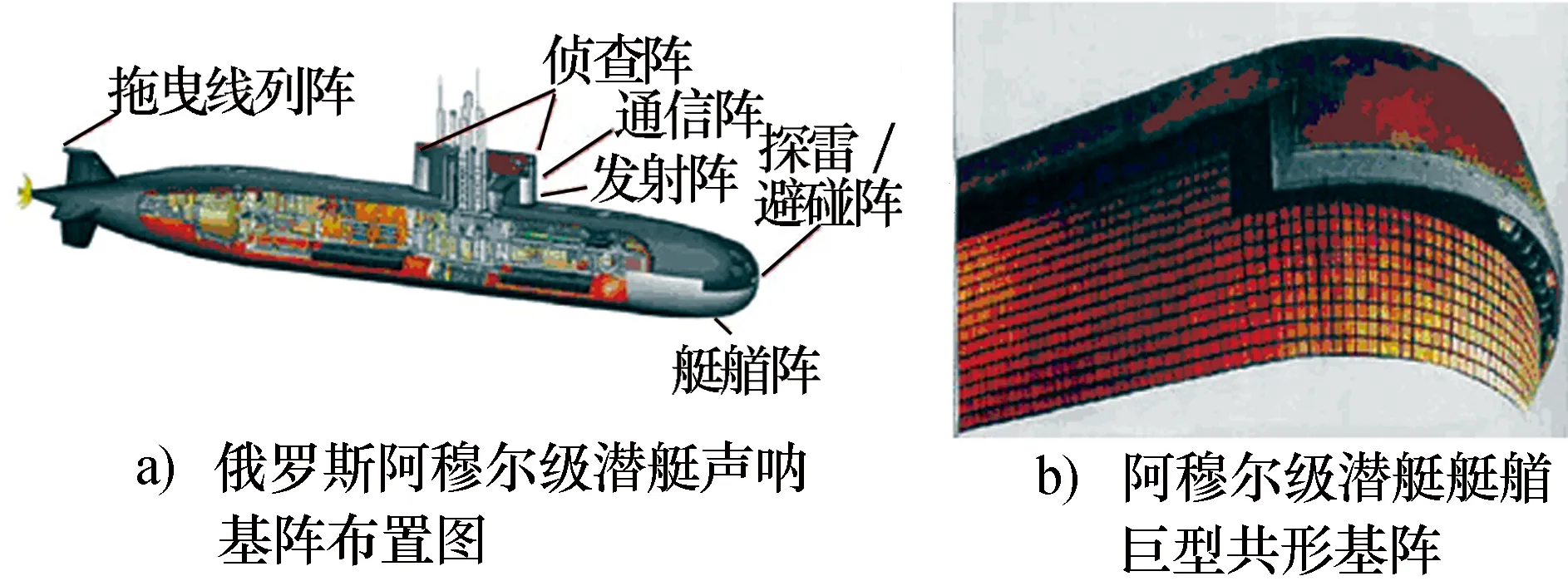
图4 俄罗斯阿穆尔级潜艇声呐
2.3多基地协同探测
随着潜艇主被动声隐身技术的发展,潜艇自体辐射噪声与二次反射声的声级越来越低,使单基地声呐和被动声呐在反潜方面的瓶颈越来越凸显。主动声呐由于收发一体,工作时较易被敌艇发现而实施规避,被动声呐对安静型潜艇的探测能力十分有限且虚警率高。多基地声呐网络使用一部或多部大功率声源照射监测海域,多部接收声呐工作于被动舰艇模式接收回波。发射基地与接收基地可选择岸基声呐、舰载声呐、声呐浮标、航空吊放声呐等不同的声呐载体,通过多站址的信息融合和声场环境匹配技术实现对水下目标的精确跟踪定位。与单基地声呐相比,多基地声呐具有更好的探测性能、配置灵活性和水下对抗生存能力。
多基地技术最早起源并应用于雷达领域,于20世纪60年代被引入水下探测。由于水中声波传播速度低、水介质起伏不均和水声信道复杂多变等因素,多基地声呐探测仍处于试验研究阶段。目前国外从事多基地声呐研究的有美国德克萨斯大学应用研究实验室、华盛顿大学应用物理实验室、康涅狄格大学、美国水下战中心、海军声学研究部,欧洲北约水下研究中心、荷兰应用科学研究组织等。2005年,美国、荷兰、德国、意大利、英国等国共同组建了多基地定位工作组,通过国际间的合作和资源共享,共同推动多基地技术的发展。当前,国外在多基地声呐开展的重点研究方向包括多基地系统配置与定位性能研究、多址数据融合与目标跟踪算法、直达波干扰抑制、收发分置下目标回波特性、多基地同步技术。
1995年,北约水下研究中心开始对分置式多基地声呐系统(DUSS)进行论证研制,1998年至今共进行了九次海试。DUSS设计为工作于近岸浅海混响环境,使用锚地或拖曳声源和25元星形接收阵,通过卫星通信、水声通信、GPS定位导航的技术实现模块化组网,实现对海域的覆盖(如图5所示)。DUSS接收阵内部集成板载DSP信号处理机,由发射信号触发,工作带宽240 Hz,工作持续时间50 s。处理机对接收到的信号进行滤波,经过调制后信号经由无线电会电缆传至控制中心。DUSS系统海上试验共进行了四种不同的航行轨迹,接收到2 610个目标回波脉冲,系统探测范围一般在10 km左右,最大探测距离22 km。DUSS系列海试得出的结论是[3]:多基地接收网络的接收基地在满足相同检测/虚警概率时,系统性能达到最优;直达波稳定技术、信息身份确认技术至关重要;无论是集总式还是分布式多基地网络,数据融解算中心的设计十分重要,若设计不当,多基地声呐网络的定位功能可能不如单基地声呐;选用集总式信息融合处理时,宜选用较低的检查门限;选用分布式信息融合处理时,宜选用较高的检测门限。
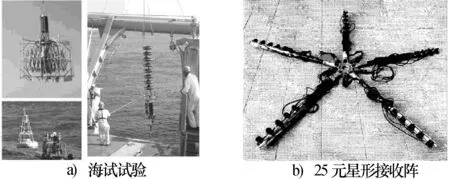
图5 分布式多基地声呐系统DUSS系统25元水听器阵列
2.4采用开放式体系架构和COTS技术,改善研制周期和成本
通过采用标准化、模块化组件,声呐开放式架构能够显著减少专用元器件、专用组件或模块以及专用软件的数量,提高声呐的通用性、兼容性和维修性,便于重构、扩充和升级。COTS成熟技术能够缩短声呐研制周期,降低研制风险和设备成本[4]。
20世纪90年代初,美国提出“商用声学技术快速嵌入”(ARCI)计划,并逐步在美海军声呐系统上应用开放式体系架构和COTS技术,如“洛杉矶”级核潜艇上的BQQ-5和BSY-1型、“海狼”级核潜艇上的BSY-2型和“俄亥俄级”核潜艇上的BQQ-6型等声呐系统。在ARCI计划中,声呐信号处理机已完成五代更新,信号处理能力共提高近200倍,经费开支降低到原来的1/10。英国也提出了“声呐COTS技术快速掺入计划”(DeRSCI),在现有声呐系统中集成COTS技术,降低成本。美欧声呐通过采用“多功能处理机中间件”技术,将应用软件与底层硬件隔开,保证了COTS硬件的“即插即用”和软件的可移植性,且潜艇部队可在不影响日常训练和战备行动的情况下定期更新软硬件。美军在声呐软件开发中建立了严格的APB流程,基于COTS技术和开放式体系架构,使众多民用算法与技术开发公司、学术机构、科研院所均可参与到潜艇声呐系统软件的开发,使声呐信号处理算法开发和更新周期降低了2/3,更新成本也显著降低。
3 国外声呐技术发展趋势
3.1全自适应智能化认知
传统主动声呐系统在处理目标反射回波时,没有考虑声呐接收机感知的环境信息和目标特性的先验知识对发射机的影响,发射信号参数固定。因此,在传输衰减、噪声、混响、多径、时变和大多普勒等复杂水下环境中很难获得理想的探测效果。基于知识理论的智能化认知声呐能够根据环境变化和目标特性的先验知识对发射机和接收机进行联合自适应控制,提高对水下目标信号的探测和识别能力。
受近年认知无线电、认知雷达快速发展的启发[5],通过将先验知识和连续学习引入传统声呐系统,建立对发射端的自适应反馈控制,提出了认知声呐,其组成如图6所示。发射机与接收机、环境以及目标之间构成一个动态的闭环系统,可对发射波束、功率、频率、重频、脉内调制和接收波束、检测门限以及工作模式根据环境变化、性能要求和先验知识动态调整。对于传统声呐,声呐接收机感知的环境信息和处理结果对声呐发射机没有影响,声呐系统也没有能够提供极大得益的学习环节。同时,传统声呐设计假设的是理想水下环境,如将随机信号设定为遍历过程,将不平稳背景设定为平稳背景,也不考虑信号多径、干扰起伏、边界极限等不确定因素,导致测量结果与实际情况明显不一致。认知声呐将发射机、接收机与环境自适应匹配,根据对工作环境和目标信息的学习,不断更新接收机和自适应调整发射机;发射机根据目标距离、尺寸,调整发射波形参数,智能地进行照射;整个认知声呐系统构成发射、接收和环境的闭合反馈环路;利用环境和目标先验信息提高声呐系统性能。文献[6]利用仿真验证了认知声呐相对传统声呐的优势。

图6 认知声呐示意图
3.2共址和分布式MIMO声呐
MIMO技术首先在通信和雷达领域得到应用,分为共址MIMO和分布式MIMO。共址MIMO利用发射信号的分集特性扩展收发阵列的虚拟孔径,提高目标探测能力。分布式MIMO阵元分开排列,发射正交信号,从不同角度照射目标,减低起伏衰落,提高探测稳定性。水下特别是近海航船数量多、噪声大、声场复杂、多径和多普勒效应严重,对水雷、蛙人、静音潜艇等弱小目标探测难度大,传统主被动雷达都难以达到理想效果,MIMO声呐为解决这一问题提供了一条新途径。
2006年I.Bekkerman等人提出了MIMO声呐目标检测与定位的处理架构,证明了通过发射正交波形引入虚拟阵元可以提高目标探测能力,推导了广义似然比检测器和侧向的CRB性能极限。W.H.Li等人于2008年提出MIMO声呐处理模型,并分别与单输入单输出、单输入多输出以及多输入单输出处理进行了性能比较。2009年,R.V.Vossen等人通过引入虚拟源信息提高了目标检测能力。2010年,S.L.Zhou等人利用空-时编码技术降低了MIMO处理对正交发射信号间互相关性要求。国内浙江大学、中科院声学所和西北工业大学三家单位开展了MIMO测向方式、波形设计、算法设计方面的研究。
3.3广域异质多传感器联合感知
单一传感器探测效率低,难以满足大范围、长时间水下信息获取需求,通过网络技术将警戒监视海域内多个不同位置布放的声呐、雷达、激光、红外等传感器进行互联,实现数据的交换、分发和汇聚,进行集中或分布式数据处理,可以形成分布式网络化水下警戒探测系统,实现对覆盖范围内目标的探测、定位、跟踪和分类识别功能。分布式网络化水下预警探测系统具有机动灵活、成本低、效费比高等优点,能够有效增强水下战场信息感知能力。
美国早在20世纪50年代,就开始在其东、西海岸以及原苏联潜艇进入各大洋的必经之路上布设岸基声呐监视系统SOSUS,后来又陆续布设了FDS和ADS等固定分布式系统。为弥补固定式水生监视系统的不足,美国还建立了由专用拖船和战略型长拖曳阵列构成的机动监视系统SURTASS,并具备主被动探测能力[7]。近年来,为对付潜在潜艇威胁和浅海、沿岸水域的水雷威胁,美国进一步发展以海网为代表的水下探测体系,结合分布式敏捷猎潜DASH、可部署自主分布式系统DADS以及直升机反潜系统,实现大区域水下感知,并向跨域对海监视引导体系CDMaST迈进,期望在高对抗环境中,利用水下、海上、空中等有人、无人系统的雷达、光电、声呐探测装备,构建跨域分布式探测、识别、定位、打击、评估体系,提高作战效能,见图7。

图7 美军CDMaST平台、传感器、武器、通信 、导航协作战体系架构
4 结束语
声波在水中优异的传播性能使声呐成为水下目标预警探测和火力控制的核心装备,从声呐诞生发展至今,无论从体制、功能、平台、应用,还是探测距离、精度、分辨率和覆盖范围,声呐技术都得到了跨越式发展,发挥了重要的情报保障作用。但受环境噪声、多径效应、混响、边界层等复杂水下环境的限制,声呐一直没有达到雷达类似的威力和战场影响。MIMO技术、认知技术为声呐开辟了新的系统架构和处理样式,跨域异质传感器联合感知也为声呐参与到更广阔的协同探测体系提供了机会,随着国际形势的变换和新形势下任务需求的牵引以及软硬件基础支撑技术的进步,声呐将引来新一轮变革与发展。
[1]闵瑞红, 肖杰雄. 世界潜艇综合声呐系统发展现状与趋势[J]. 舰船科学技术, 2013, 35(2): 134-141.
MINRuihong,XIAOJiexiong.Thestateanddevelopmentofsubmarineintegratedsonararoundtheworld[J].ShipScienceandTechnology, 2013, 35(2): 134-141.
[2]杨跃轮, 朱庆辉. 潜艇声呐技术发展研究[J]. 潜艇声呐技术发展研究, 2012(2): 40-44.
YANGYuelun,ZHUQinghui.Developmentofsubmarinesonartechnology[J].AcousticsandElectronicsEngineering, 2012(2): 40-44.
[3]CORALUPPIS,CARTHELC.Performancelimitsofreal-timecontact-basedtracking[C]//OCEANS2007-Europe.Aberdeen:IEEEPress, 2007: 1-6.
[4]MILLERRW.ArevolutionaryuseofCOTSinasubmarinesonarsystem[J].TheJournalofDefenseSoftwareEngineering, 2004(11): 8-11.
[5]HAYKINS.Cognitiveradar:awayofthefuture[J].IEEESignalProcessingMagazine, 2006, 23(1): 30-40.
[6]LIXH,LIYA,LINGC,etal.Researchoftheprincipleofcognitivesonarandbeamformingsimulationanalysis[C]// 2011IEEEInternationalConferenceonSignalProcessing,CommunicationsandComputing(ICSPCC).Xi′an,China:IEEEPress, 2011: 1-5.
[7]凌国民. 海战场水下信息技术综述[C]// 海战场电子信息技术学术论文集. 桂林:中国造船工程学会电子技术学术委员会, 2011: 1-6.
LINGGuomin.Underwaterinformationtechnologyofnaualbattefield[C]//ProceedingsofElectronicInformationTechnologyinNavalBattlefield.Guilin,China:ElectroicTechnologyAcademicCommitteeofChinaShipbuildingEngineeringSociety, 2011: 1-6.
赵培聪男,1963年生,高级工程师。研究方向为雷达系统工程及技术管理。
Study Status and Development Trend of Foreign Sonar Technology
ZHAO Peicong
(Naval Representative Office for Military Facilities in Nanjing Area,Nanjing 210039, China)
In this paper, development and progress of sonar from its birth to nowadays is outlined. Type, regime, user nations and mounted platform of foreign mainstream sonars in commission are summarized. Study status of foreign sonar technology is analyzed from four aspects, which are multi-function integration, array formation, multi-static cooperation, and open system architecture. Together with operation task requirement and basic support technology, development trend of sonar technology is envisioned from three dimensions, that are fully adaptive intelligent cognitive technology, MIMO technology, and wide domain multi-sensor joint awareness technology.
sonar; multi-function sonar; conformal array; multi-static sonar; open system architecture; cognitive sonar; MIMO sonar; cooperative detection
10.16592/ j.cnki.1004-7859.2016.08.005
赵培聪Email:zhaopcong@126.com
2016-04-19
2016-06-23
TN959.7
A
1004-7859(2016)08-0020-05