基于DSP的无刷直流电机位置伺服系统设计
2016-09-13程时兵王炜
程时兵,王炜
(中国空空导弹研究院 河南 洛阳 471009)
基于DSP的无刷直流电机位置伺服系统设计
程时兵,王炜
(中国空空导弹研究院 河南 洛阳471009)
舵机作为一种典型的位置伺服系统,是智能化精确制导弹药飞行控制系统的关键部件,其性能的优劣直接影响制导武器的制导精度。本文以先进的数字信号处理器TMS320F2812为主控制芯片,采用稀土永磁无刷直流电动机作为驱动部件,采取位置闭环控制方式完成了数字式无刷直流电动控制系统的硬件设计和软件设计。试验结果表明,该系统工作稳定、可靠,具有良好的动态性能和静态特性。
DSP;无刷直流电机;位置闭环控制;舵机
现代战场环境日益复杂,对导弹、智能弹等制导武器提出了全新的要求,为了适应未来战争的需求,需要制导武器具有更高的精度、更好的机动性以及稳定性。而舵机作为制导与控制系统的重要组成部分和执行机构,其性能的优劣直接影响武器的制导精度。当前舵机系统的主要研究和发展方向是:实现系统的全数字化,结合现代控制、智能控制等控制理论进一步提高系统的控制精度并实现其智能化,采用高性能的执行机构与传动装置,研发“三高一长(高功率密度、高可靠性、高性能、长时间工作)”的新型导弹舵机系统[1]。
永磁无刷直流电机(BLDCM)是随着电机控制技术、电力电子技术和微电子技术的发展而出现的一种新型电机,它具有结构简单、运行效率高、无励磁损耗及调速性能好等诸多优点,而且还具有功率密度高,低转速,大转矩的特点,被广泛应用于工业控制的各个领域[2-4]。文中选用TI公司的TMS320F2812 型DSP作为主控制芯片,以永磁无刷直流电动机作为驱动部件,设计一种数字无刷直流电机位置伺服控制系统,具有控制精度高、可靠性好、集成度高、功能可扩展等优点。
1 系统组成
无刷直流电机控制系统的功能是对的位置指令、位置反馈信号进行信号处理,输出信号驱动直流电机偏转,实现位置伺服跟踪。它主要由DSP、逻辑处理电路、驱动电路、伺服电机、传动机构等组成,其组成框图如图1所示。
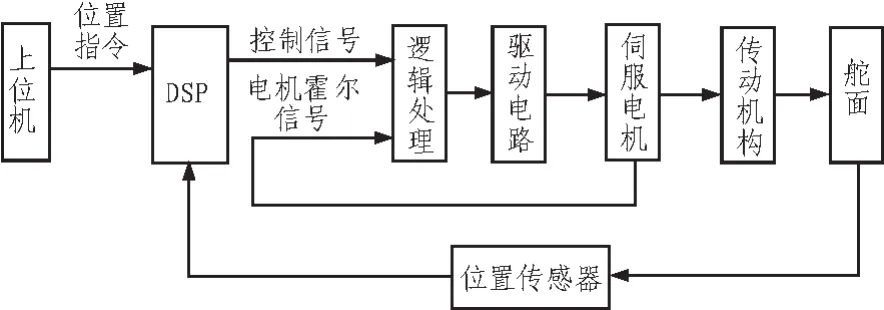
图1 无刷直流电机控制系统框图Fig.1 Diagram of the BLDC control system
BLDCM控制系统的基本工作原理为:
1)控制系统与上位机通过通讯单元进行实时通信,DSP接收位置指令、位置反馈信号,经运算输出电机控制信号;
2)逻辑处理电路对电机霍尔位置信号、电机控制信号、过流保护信号进行逻辑处理,产生控制功率管开/关的相序,实现电机绕组的逻辑换相控制;
3)驱动电路采用三相全桥、上桥臂调制方式,经过驱动芯片IR2103控制逆变电路的MOSFET功率管的开通与关断,实现电机的PWM控制;
4)电机的转动经过减速机构带动舵面作相应的偏转,位置传感器实时检测舵面位置信息,通过采样反馈给DSP,实现无刷直流电机的位置闭环控制。
2 系统硬件设计
BLDCM控制系统的硬件电路主要包括:DSP及其外围电路、逻辑处理电路和驱动电路等。
2.1DSP及其外围电路
目前,在电动伺服控制领域,性能及数字信号处理能力较强的控制芯片主要为TI公司推出的TMS320F2000系列DSP芯片。该系列DSP具有强大的控制和信号处理能力,能够实现复杂的控制算法,特有的事件管理器集成了PWM控制信号发生器,特别适合电机控制。本系统选用TMS320F28-12型DSP,它具有丰富的外设资源,采用它作为控制器可以大大简化硬件电路结构、提高系统的可靠性。它实行低功耗设计,I/O引脚电压为3.3 V,内核电压为1.8 V。最高主频150 MHz,最小指令周期6.67 ns,外部采用低频时钟,通过片内锁相环进行倍频[5]。SCI外设接口与可与飞控计算机方便地进行RS-422串口通讯。
2.2逻辑处理电路
逻辑处理电路的主要功能是对直流无刷电机的霍尔位置信号(HA、HB、HC)和电机转向指令信号(DIR)进行逻辑处理产生控制功率管开/关的相序,使电机的三相电枢绕组按一定规律顺序导通,从而实现对无刷电机的控制。
系统仅对逆变电路的上桥臂MOSFET管进行PWM调制。根据无刷电机霍尔信号、电机转向指令与输出功率管开关相序的之间的真值关系,可以处理得到开关管的控制信号(S1~S6)的逻辑表达式如下:

根据无刷电机的换相逻辑,结合信号,在QuartusⅡ的环境下,对功率开关管的开关相序进行仿真,仿真结果如图2所示。
本系统采用4个门电路来实现(1)~(6)逻辑关系式,此电路结构简单、稳定可靠,从而从硬件上完成电机的逻辑换相功能,其电路图如图3所示。
2.3功率驱动电路
该功率驱动电路采用三相六步全桥驱动、上桥臂MOSFET管进行PWM调制的控制方式。功率元件采用N沟道MOSFET管,驱动元件采用美国IR公司栅极驱动专用电路IR2103,其独有的HVIC(High-Voltage Integrated Circuit)技术使得它可以用来驱动工作在母线电压高达600 V的电路中的MOS器件。逻辑输入信号与CMOS电平兼容,输出栅极驱动电压的范围为10~20 V,开关时间的典型值为Ton=680 ns、Toff=150 ns,死区时间的典型值为520 ns,内置的死区电路可以防止由于MOS器件关断延时造成的直臂导通现象,进一步提高了系统的可靠性[6]。图4是由IR2103组成的驱动电路的单桥臂电路原理图。
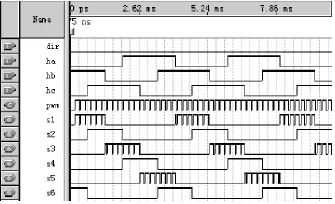
图2 无刷直流电机换相逻辑仿真图Fig.2 Simulation waveforms of commutation logic for brushless DC motor
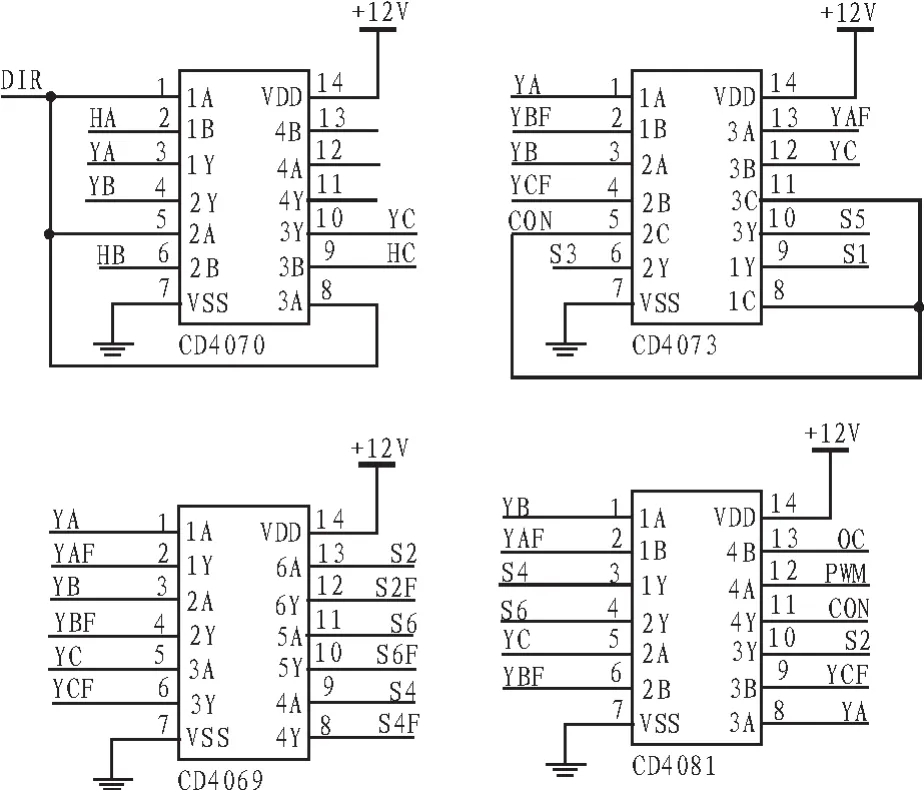
图3 电机逻辑换相电路图Fig.3 Circuit diagram of commutation logic

图4 功率驱动单桥臂原理图Fig.4 Circuit diagram of single power driver for BLDC
2.4其他硬件电路
过流保护电路是为了提高系统的可靠性,对电机最大工作电流进行限制,以避免系统损坏。其原理是通过采样电阻将母线电流转换成电压,与设定值电压进行比较,电流超过限定值则此电路输出过流保护信号(OC),逻辑处理电路控制功率管关闭,使电流回落,由此构成对电流的硬件闭环控制。
3 系统软件设计
采用C语言编写内置软件,主要包括主程序、定时中断子程序、通信子程序等。主程序进行系统初始化,使能CPU定时器0,进入while()循环等待CPU定时器0中断发生。其流程图如图5所示。CPU定时器0采用定时周期中断,定时器中断程序流程图如图6所示。
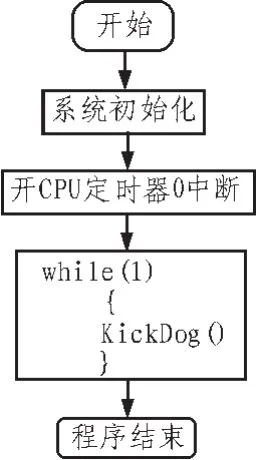
图5 主程序流程图Fig.5 Flow chart of the main program
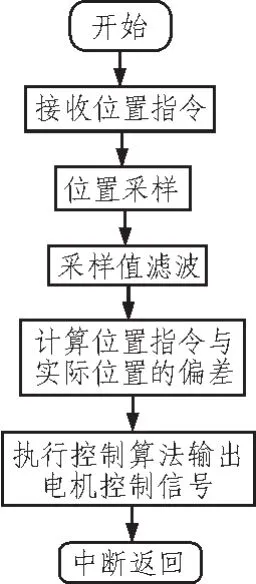
图6 定时器0中断程序流程图Fig.6 Flow chart of the interrupt program for timer 0
4 试验结果
采用上述硬件电路和软件设计方案,选用某公司额定功率约为370 W、空载转速为16 500 rpm的稀土永磁无刷直流电动机作为实验样机进行了试验研究。采用模糊PID控制算法,对此系统进行测试,1度阶跃和10 Hz正弦指令下的响应曲线如图7、8所示。试验结果表明,此系统对输入的位置指令具有良好的响应特性。
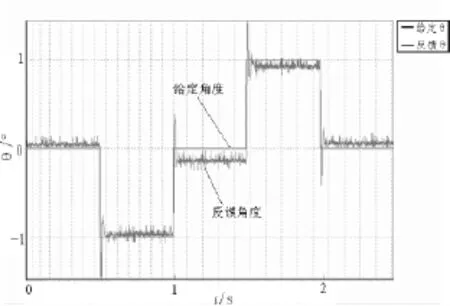
图7 1度阶跃响应曲线Fig.7 Response curve of 1°step
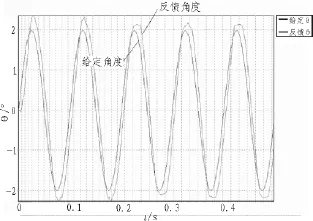
图8 10 Hz正弦响应曲线Fig.8 Response curve of 10 Hz sinusoidal
5 结 论
本文采用位置闭环控制方式,完成了一种基于DSP的无刷直流电机控制系统设计。系统采用模糊PID控制策略,对位置环、电流环进行了详细设计,并在实验中测试、分析了系统的阶跃、正弦响应特性。经试验检验,该系统运行稳定、可靠,具有很强的工程应用价值。
[1]王军.浅述舵机伺服系统[J].伺服控制,2013,12(8):35-38.
[2]张琛.直流无刷电动机原理及应用[M].北京:机械工业出版社,1996.
[3]叶金虎.无刷直流电动机[M].北京:机械工业出版社,1990.
[4]孙建忠,白凤仙编著.特种电机及其控制[M].北京:中国水利水电出版社,2005.
[5]万山明编著.TMS320F281XDSP原理及应用实例[M].北京:北京航空航天大学出版社,2007.
[6]张爱军,程时兵,朱军伟,等.基于DSP+CPLD的无刷直流电机三环控制设计[J].电力电子技术,2012,46(11):106-108.
The design of BLDCM position servo system based on DSP
CHENG Shi-bing,WANG Wei
(China Airborne Missile Academy,Luoyang 471009,China)
As a typical position servo system,actuator is a key sector of flight control system in intellectual precision guided munitions,its performance directly affects the guidance precision of guided weapons.Hardware and software strategy for the control system of brushless direct current motor servo control system are designed by using the position as a close-loop in this paper.In this system,the advanced digital signal processor TMS320F2812 is adopted as main control cell,permanent magnet brushless motor is used as the electric drive component.Experiments validate that the system designed works stably and reliably,it has good dynamic and static characteristic.
DSP;brushless direct current motor;closed-loop position control;servo
TN964.3
A
1674-6236(2016)05-0110-03
2015-04-15稿件编号:201504153
程时兵(1983—),男,湖北黄石人,硕士,工程师。研究方向:电力电子,自动控制技术。
