面向码垛机器人的倒包汇集输送系统的设计与改进
2016-09-10覃尚活林义忠杨中华邱永兵黄金稳
覃尚活,林义忠,杨中华,邱永兵,黄金稳
(1.广西大学机械工程学院,广西南宁530004;2.广西农业机械研究院,广西南宁530007)
新产品开发
面向码垛机器人的倒包汇集输送系统的设计与改进
覃尚活1,林义忠1,杨中华2,邱永兵2,黄金稳2
(1.广西大学机械工程学院,广西南宁530004;2.广西农业机械研究院,广西南宁530007)
根据码垛机器人的工作需要,采用西门子S7-200系列PLC作为核心控制器,利用梯形图语言和基本指令,实现对9个传送带和两个倒包器的自动控制功能,并在此基础上进行改进,增加了变频器、触摸屏操作界面,使得系统更加稳定可靠。经过试验,所开发的倒包汇集输送系统基本可行。
传送带;PLC;倒包器;码垛机器人
传送带是现代化工厂中常见的设备之一,被广泛应用于各行各业。当前,随着国内人工成本的快速上升,各行各业都加快了生产设备的升级换代,逐步采用自动化生产设备取代原有的老旧设备,机器人的广泛应用有效的提高了企业的自动化水平,然而,和机器人配套的自动化设备却相当缺乏,因此设计研发面向机器人的自动化设备成为了当前的一个热门研究方向,本文根据糖厂自动化生产的需求,设计出了面向码垛机器人的倒包汇集输送系统,能根据码垛机器人的工作需要将包装好的糖袋传送到机器人指定的工作区,实现了传送带和机器人的友好配合,达到了预期的效果。
1 输送系统原理及控制要求
1.1输送系统工作原理
本系统由两条汇集传送线路和一条主传送线路组成(控制系统工作原理简图如图1),包含两个倒包器(倒包器如图2)、9个传送带。工人将糖装入袋子并且密封好之后,糖袋为立式状态,按下启动按钮,并根据工作需要选择相应的汇集传送线路,糖袋经过汇集线路1号和2号(或者3号和4号)传送带传送到倒包器,倒包器中间装有感应器,感应器感应到糖袋,执行倒包动作,将糖袋推倒进入5号或者6号传送带,到达7号(斜坡)传送带,经过斜坡传送带后,糖袋从仓库的较高位置入较低的位置,再由8号和9号传送带的协调配合,即可将糖袋送达码垛机器人的工作区(滚筒输送机)。
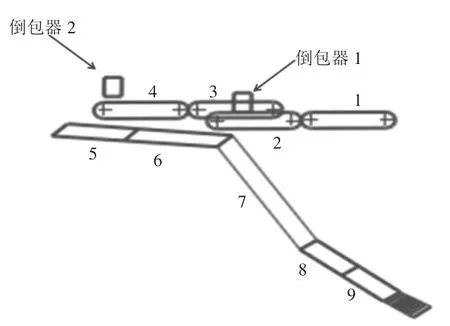
图1 输送系统工作原理图
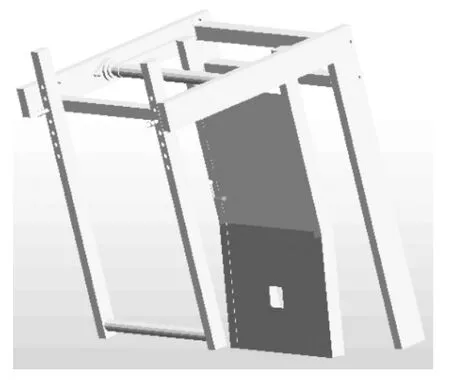
图2 倒包器
1.2控制要求
面向机器人的倒包汇集输送系统作为码垛机器人的辅助设备,对提高机器人的工作效率有着不可或缺的作用,该设备主要完成倒包任务和输送任务,两个任务互相配合,按照机器人的工作需求将位姿正确的糖袋定时传送到机器人的工作区。该系统有两个倒包器,9个传送带,要求每个传送带都有启动和停止功能,倒包器中间装有传感器,处于立式状态的糖袋传送过来,触发感应执行倒包动作,码垛机器人完成一次作业的时间是5 s,所以传送带要以5 s为时间间隔向机器人传送糖袋。传送过程中不能出现叠包现象。
2 系统分析
因为要定时向机器人传送糖袋,所以电机的选择显得尤为重要,从成本和效率来综合考虑,本系统选择三相电机作为系统的动力源[1]。传送带只需要单方向运动,所以本系统选择单向直接启动控制方式,单相直接启动电路分为主电路和控制电路,主电路由开关、熔断器、交流接触器和电机组成,控制电路采用停止优先的控制方式,控制电路的电压采用24 V直流,通过降压器将交流电转换为24 V直流电[2-3]。这种控制方式可以实现对电动机的启动停止、远距离控制及频繁操作等。本控制系统共有9个电机,两个倒包器,每个倒包器分别有4个传感器:来包检测、落包检测、推包伸出到位、推包回缩到位,再加上出于安全考虑的一些开关,系统所需输入输出口数量相当可观,综合考虑之下,本文选择PLC作为控制中心单元,PLC控制与传统的继电器控制相比具有响应速度快,可靠性高,功能完善,灵活性好等优点。PLC以毫秒级的扫描时间减少了系统误差,提高了控制精度。考虑到系统冗余量、性价比以及稳定性,本文选用德国西门子公司生产的S7-200系列PLC,该款PLC具有价格低,可靠性强,扩展性好等优点。为了减少按钮,本文将传送带的各个启动开关都选用自锁按钮,这样即节省了输入口又方便工人操作。1、2、3、4号传送带传送过来的糖包只有在立式状态下才可被倒包器检测到,但是糖包在传送期间由于震动等原因常常会呈现斜立状态,这时候就得停下传送带,进行人工调整。为了提高工作效率,这四个电机的启动电路上分别串联两个自锁按钮,实现了多工位操作的目的和较高的安全性。控制系统框图如图3所示。
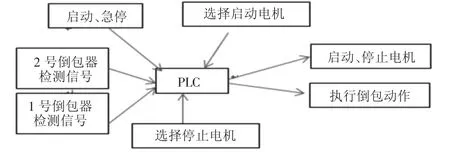
图3 控制系统框图
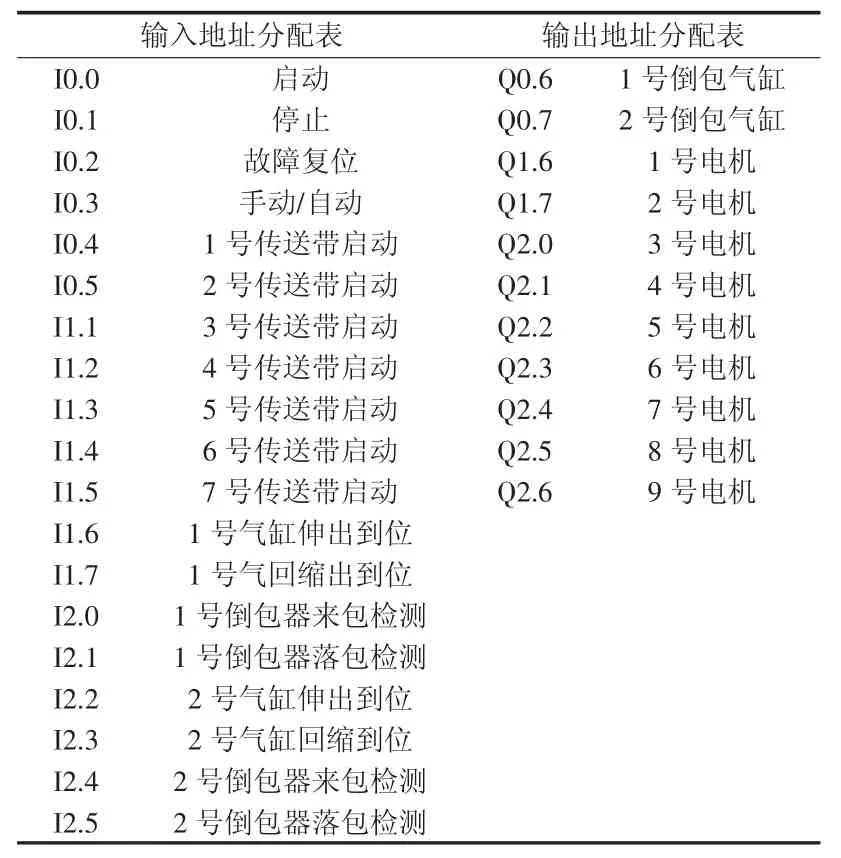
表1 主要I/0口分配
3.2程序编写
为了方便编程、更新程序,本系统在编程时采用以功能为导向的编程方法,启动和停止用“起保停”的方式编写,将启动后的信号和各个电机的启动信号串在一起,这样就实现了各个电机的启动和停止。在这个基础之上添加故障报警、故障处理等。为了防止传感器因外部干扰而造成控制器误判的情况,可以增加接通延时定时器指令,这样可以提高控制系统的准确性。系统程序流程图如图4所示。
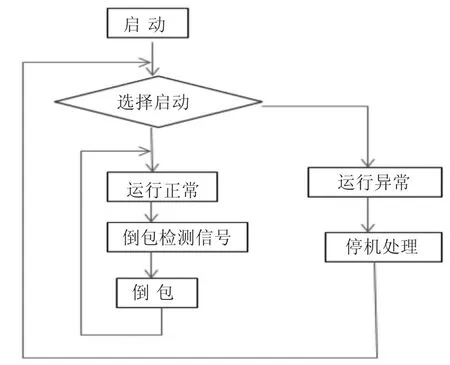
图4 系统程序流程图
3 系统软件编程
3.1I/O口分配
根据控制要求,采用梯形图和基本指令能够完成本系统的控制任务。梯形图语言沿袭了传统的继电器控制电路的形式,具有简单、直观、易懂、实用等特点,使得它成为众多工程师首选的设计方法。主要I/0口分配如表1所列。
4 改进方案
4.1系统缺陷
三相异步电动机的转速计算公式近似为n=60 f/p,其中,n为电机转速,f为工频,p为电动机的磁极对数级数,所以当三相电动机选定后,传送带的速度就确定了,这样就降低了系统的灵活性,造成资源的浪费[4]。由于电机速度不可调,而机器人的工作周期为5 s,为保证机器人的最大工作效率,在选择电机的时候得考虑的问题就相当多,比如要考虑传送距离、传送间隔、工人的工作效率等。
系统缺少总控制平台,无法实现总体监控和总体控制。如果控制按钮出现故障,将导致传送带无法控制;传送系统比较庞大,单靠人工看管监控不利于安全生产。
4.2改进措施
增加触摸屏设备,触摸屏可以代替按钮和指示灯,实现智能化显示,触摸屏上的图符可以代替机械按钮,还可以显示数据、设置参数,实现对系统的总体控制。改进方案采用台湾生产的威伦通i系列触摸屏和界面编写软件EB8000,主要内容包括系统的启动、停止、监控等图符,界面简洁美观,可操作性强,达到了控制要求。
为了提高系统的柔性,就得调节三相电机的转速,三相电机有两种调速方式,一是改变电机的磁极对数,二是改变交流电的频率。综合考虑之下采用改变交流电频率的方式来调节电机的转速。无论是家庭还是工厂中交流电的电压和频率都是固定不变的,因此就得增加可以改变交流电频率的变频器,变频器一般先将三相交流电变换为直流电,然后再将直流电转换为三相交流电,经过这样的转换,就可以输出相应的频率和电压可调的交流电。用变频器驱动三相电机可以平滑的改变电机的转速,大大降低启动电流,能平稳的启动和停止,对设备的冲击力小,可以有效延长电机的寿命。为系统每个三相电机配一个变频器,通过PLC的模拟量输出模块控制电机的转速[5]。控制示意图如图5所示。

图5 变频器控制系统示意图
5 结束语
本文以PLC作为倒包汇集输送系统的核心控制器,将倒包器、传送带、码垛机器人友好的融合在一起,改进后的输送系统提高了工作效率,降低了能源消耗,工作性能稳定,达到了预期效果。
[1]李英辉,曲昀卿,崔成,等.传送带PLC控制系统设计[J].制造业自化,2013,(07):128-129,143.
[2]王艳美.变频器和PLC在传送带多种速度控制中的应用[D].苏州:苏州大学,2010.
[3]展学胜.PLC传送带电控系统的设计与实现[J].黑龙江纺织,2005,(02):36-38.
[4]许伍,郎朗.基于PLC和WinCC的机械手与传送带控制系统设计[J].安徽工程大学学报,2014,(01):62-65.
[5]陆伟.基于PLC的多级传送带控制系统[J].数字技术与应用,2015,(05):2-4.
Design and Im provement for the Topp le and Collect Bags System of Robot Palletizer
QIN Shang-huo1,LIN Yi-zhong1,YANG Zhong-hua2,QIU Yong-bing2,HUANG Jing-wen2(1.Mechanical Engineering College of Guangxi University,Nanning 530004,China;2.Guangxi Agricultural Machinery Research Institute,Nanning 530007,China)
According to the necessary of robot palletizer,this paper use siemens series S7 200 PLC as the core controller,LAD and elementary instruction are used to achieve automatic control for the 9 conveyors and 2 topple bagmachines.On this base,touch screen and transducer is included to make the system more reliable.Through the test and operation,the control system proved to be basic feasible.
conveyor;PLC;topple bagmachines;robot palletizer
TP393
A
1672-545X(2016)05-0231-03
2016-02-20
项目名称:广西科学研究与技术开发计划(编号:桂科重1598003-4)
覃尚活(1989-),男,广西贵港人,硕士研究生,研究机电液一体化方向。