基于陀螺稳定平台的吊舱控制系统设计
2016-09-10汪丹丹贾临生
汪丹丹,贾临生
(海军航空兵学院辽宁葫芦岛海军航空兵学院,辽宁葫芦岛125001)
基于陀螺稳定平台的吊舱控制系统设计
汪丹丹,贾临生
(海军航空兵学院辽宁葫芦岛海军航空兵学院,辽宁葫芦岛125001)
将介绍一套基于陀螺稳定平台的吊舱控制系统,分析了吊舱系统的总体结构,着重研究了基于DSP -TMS320F28335的控制系统的硬件设计与软件实现。本系统能够准确的搜索和追踪目标,保持追踪目标的过程中视轴稳定,对隔离扰动有显著地效果。
陀螺;稳定平台;吊舱系统
陀螺稳定平台是利用陀螺仪特性来保持平台体的方位处于稳定状态的装置,它集成了惯性导航、数据采集及信号处理、微惯性传感器、精密机械动力学建模仿真和设计、图像处理、电机运动控制和光学仪器应用等多种技术。将陀螺稳定平台应用于吊舱系统能够有效地提高搜索目标和跟踪目标的准确度,在跟踪目标的过程中,如果系统受到外界的干扰,借助系统中的陀螺稳定平台可以快速地消除扰动,可靠地来保持追踪地过程中视轴处于稳定状态。本文将介绍一套基于陀螺稳定平台的吊舱控制系统,该系统可以设置在两种模式下工作:一种模式是目标没有被锁定时,陀螺稳定平台工作在搜索模式下,根据控制台给定的搜索指令信号来控制电机工作,以此来进行目标的搜索;另一种模式是系统锁定目标后,系统会进入自动跟踪的状态,此时,系统只接收与被跟踪目标位置的误差信号并进行不断修正该误差,使视轴能够始终跟踪目标。
1 系统的总体设计
本文的基于陀螺稳定平台的吊舱控制系统主要是由三个部分组成,它们分别是:本体模块、电气控制器以及人机交互模块,整个系统总体结构框图见下图1.本体模块采用两轴四框架的机械结构,整个体系从外到内可分为基座、外方位框架、外俯仰框架、内方位框架、内俯仰框架以及负载等几个部分。电气控制器包含图像处理单元、测角模块、测速模块、驱动模块和控制单元。顾名思义,人机交互模块是用于操作人员与控制系统的交互。
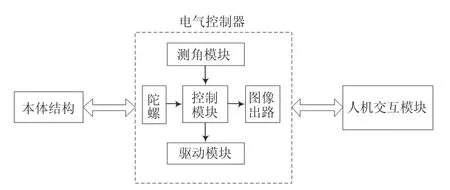
图1 系统总体结构框图
整个吊舱控制系统在控制视轴稳定的方式上采用的是整体稳定式的结构,在框架形式上采用的是两轴四框架的结构形式。整体稳定式平台在工作时,一方面稳定回路需要依靠在惯性期间通过实时监测载体相对于惯性空间的偏离位置并利用稳定控制器来进行实时校正,从而为成像传感器提供一个能获得稳定图像的平台;另一方面作为跟踪系统的内回路,需要为跟踪系统提供跟踪指令输入信号以及平台角度与角速度信号的反馈,以此来对目标进行跟踪观测。在实际应用中利用手动操作或者自动扫描的方式搜索视场,当目标被锁定后系统进入自动跟踪模式,跟踪系统收到目标偏离的信号后,控制平台会利用闭环来调节误差使视轴始终保持锁定跟踪目标[1]。平台示意图见下图2.
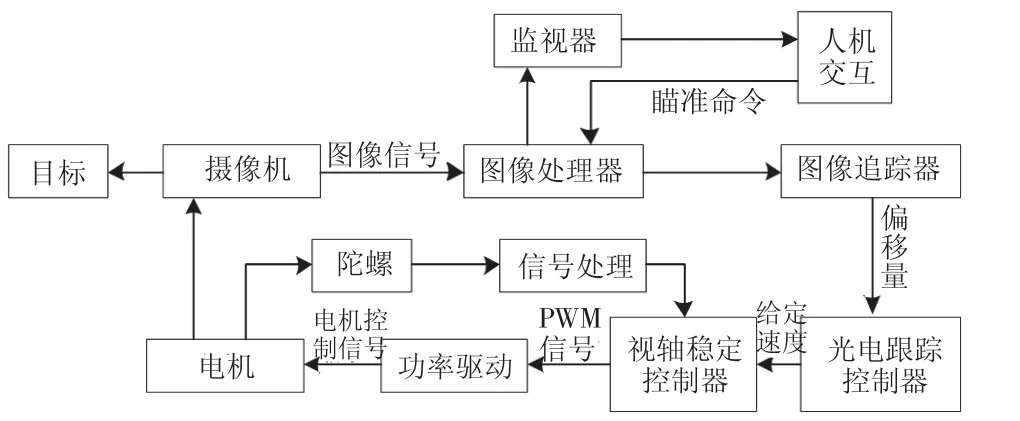
图2 吊舱系统的陀螺稳定平台示意图
本系统采用的两轴四框架的框架形式,与传统的两轴两框架相比,稳定精度更高,可以有效避免因仰角过高而导致地稳定系统的环架闭锁现象,不仅如此,它还可以减小系统中电机的体积大小和使用功率。
2 基于DSP的硬件设计
吊舱控制系统采用高速浮点型处理器TMS320 F28335为控制核心,整个硬件电路可以划分为以下几个部分:主控模块、测角模块、功率驱动电路模块等,下面分别介绍各个模块硬件电路设计。
2.1主控电路模块
主控电路的设计采用的是DSP最小应用系统,该系统包含电源模块、时钟电路、复位电路、以及存储器等,主控模块的原理如图3所示。
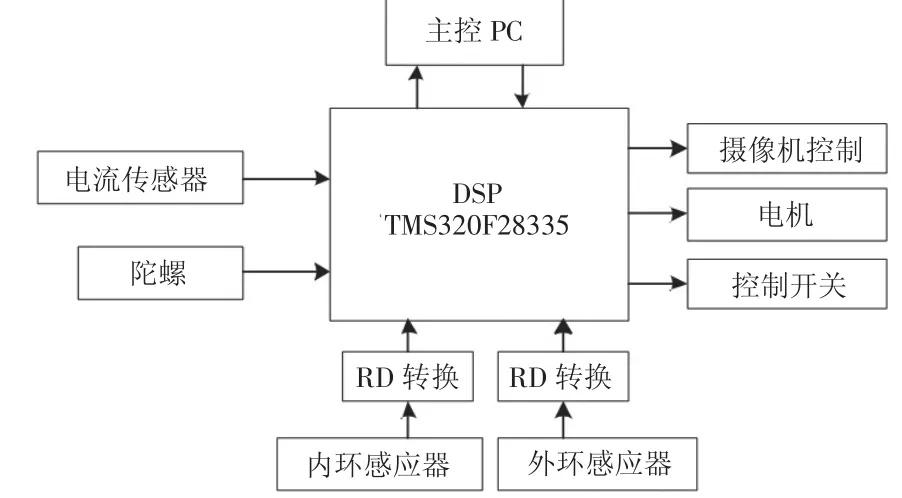
图3 主控电路原理图
电源是控制模块中的重要组成部分,TMS320 F28335的内核电压是1.9 V,I/O电压是3.3 V,因此选择TPS767D301电源调整器,它带有双路供电输出,一路固定为3.3 V,另一路输出电压可在1.5~5.5 V范围内调节;控制模块的时钟电路采用的是已经封装好的晶体振荡器,这种方式利用的是DSP芯片内部提供的晶体振荡器电路,原理图中在TMS320 F28335的X1和X2两个引脚间连接晶振来启动内部的振荡器,晶振的频率是30 MHZ[2]。
2.2测角电路模块
测角电路采用的单相绕组激磁双相绕组输出的鉴幅型方案,它主要功能包含:前置放大、模拟信号的调理、激磁以及测角编码后输出的两路正交脉冲信号等,其工作原理是利用精密函数发生器AD2S99来发出一个20 Hz的激磁信号,利用这个信号来驱动转子转动,转子位置所对应的机械角度将对定子上两个独立绕组输出的两路正弦信号进行调相和调幅,再利用数字旋转变压器AD2S90将表示滑尺位置的角度转换为数字信号输出。测角电路的原理如图4所示。
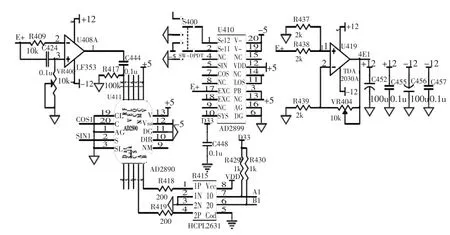
图4 测角电路原理图
2.3功率驱动电路模块
功率驱动电路是用于驱动电机工作,其原理图如图5所示,选用芯片L6205和TLE7209进行设计,L6205用于双DC或者双极步进电机,额定峰值电流为5.6 A,开关频率高达100 kHz;TLE7209具有智能的全桥电路,负载电流为3.5 V,开关频率为30 kHz,本文介绍的吊舱控制系统采用的是四路电机,因此,需要选用一片L6205和三片TLE7209来实现[3]。

图5 功率驱动电路原理图
3 控制系统的软件设计
吊舱控制系统的软件开发平台采用Code Composer Studio v3.3,本次软件设计的方法是采用模块式程序设计,把整个软件系统划分为几个独立的模块,分别对各个模块进行软件设计、编码以及调试等工作,等各模块分别完成各自的调试后再将各个模块的程序组合起来进行联调。
整个吊舱控制系统中共设置了七路的中断,分别是:一路定时中断、两路串行通信中断以及四路外部计数中断。基于这七路中断设计的主程序的流程图如图6所示,即首先是进行系统的初始化工作,完成DSP的初始化以及各个功能模块的初始化,然后设置中断并开启中断,最后当系统监测到中断信号后就进入中断服务程序,退出中断后进行数据采样[4]。
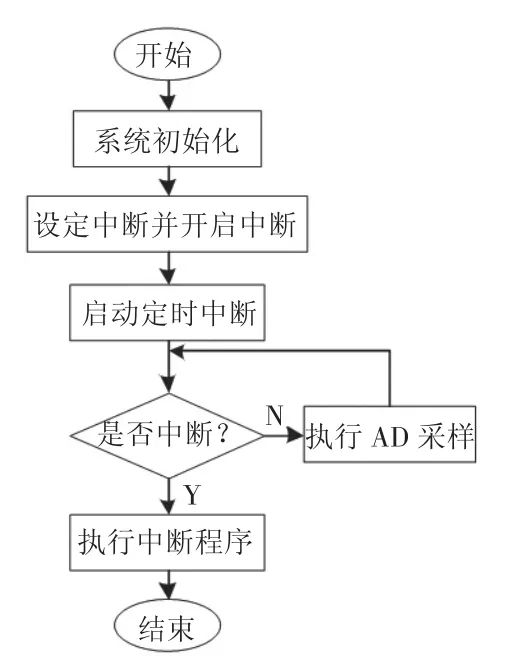
图6 主程序流程图
3.1测角模块软件设计
系统中电机的角速度和转速是由脉冲数和脉冲的频率来确定的,此外,根据两路脉冲的次序还能够判断出电机的转向。实际设计时是将两路脉冲信号A和B接入到DSP的eQEP接口电路上,由于DSP只有两路eQEP电路,然而感应同步器信号却有四路,软件设计时将两路RD转换输出的正反脉冲信号用两个可编程芯片GAL16V8分开,再用计数中断来记录正反脉冲数,以此得到四路脉冲数,最终将得到的四路脉冲数组合得到实际的脉冲数。
3.2串口通信模块软件设计
串口通信模块的硬件电路中,RS-485和RS-232分别是用于和PC以及摄像机互联,RS-485负责将数据上传到PC的同时还需要接收PC发出的控制指令,它的通信格式是:一位起始位、一位停止位、字符的长度为8位,波特率为460800bps;图像计算机RS-232用于图像计算机向DSP数据传输,图像计算机将获得的目标在摄像机视线内的实时坐标数据通过RS-232串口通信发送给下位机,以供陀螺稳定平台进行实时追踪,RS-232的通信格式是:固定长度的数据帧,每帧13字节,波特率为:115 200 bps.串行通信的软件流程如图7所示。

图7 串行通信软件流程图
3.3A/D转换模块软件设计
控制系统还需要进行六路信号的A/D采样,来完成数据的实时采集,TMS320F28335的模/数转换模块是一个12位的转换器,该转换器能够并行或者顺序采样,采样频率最高可达12.5M SPS,软件设计时将只需要读取结果寄存器中的值,将得到的值进行简单的数据处理后就可得到所需的值,值得注意的是,A/D的转换时间是很短的,需要将采样得到的数据进行平滑处理以此来提高精度。
3.4控制系统算法设计
吊舱控制系统是由位置环、稳定环、速度环和电流环四个闭环来控制。电流环通过引入电路负反馈来改善稳定回路动静态特性和低速平稳特性,降低带宽和减小死区;速度环采用感应同步器的测角微分作为速度反馈,以此减少摩擦力的干扰;稳定环是采用陀螺作为检测元件来实现抗干扰;位置环是用于修正目标的偏差提高系统的跟踪性能。
控制算法是利用数字控制器开实现,需要对PID传递函数进行双线性变换来得到各个环路的数字控制函数,控制算法在每个1 ms的定时器中断中实现,在每个中断周期,控制器完成的工作包括:陀螺的零偏差校正、接收A/D转换厚的数据、进行位置环等四个闭环的校正运算以及输出电机控制信号等[5]。图8列出了控制算法设计的软件流程图。

图8 算法流程图
4 结束语
基于当前陀螺稳定技术的发展水平,本文介绍了一个基于陀螺稳定平台的吊舱控制系统的设计方法,该系统在硬件设计方面充分利用了高速浮点型DSP TMS320F28335自身集成的强大功能,经过对其外围电路设计,实现了一个数字控制的硬件系统,然后,在此硬件基础上进行相应的软件设计,采用双速度闭环的控制算法,对系统中各个环路进行的详细的PID校正,降低了系统的扰动。本文介绍的基于陀螺稳定平台的吊舱控制系统能够可靠地搜索和追踪目标,在军事方面具有很高的使用价值。
[1]郭富强.陀螺稳定装置及其应用[M].西安:西北工业大学出版社,1995.
[2]吴凡.基于DSP的光轴稳定平台控制系统研究[M].西安:中国科学院西安光学精密机械研究所,2006:51-64.
[3]姬伟.陀螺稳定平台伺服系统非线性特性补偿控制[J].电气传动,2005,35(7):31-34.
[4]姜昆.陀螺稳定吊舱控制系统稳定回路设计与研究[M].哈尔滨:哈尔滨工业大学硕士论文,2008:25-30.
[5]韩京清.从PID技术到“自抗扰控制”技术[J].控制工程,2002,9(3):13-16.
Design ofGyro Stabilized Pod ControlSystem
WANG Dan-dan,JIA Lin-sheng
(Naval Aviation College,Huludao Liaoning Naval Academy,Liaoning Huludao 125001,China)
This paper will introduce a pod control system based on gyro stabilized platform,it analyzes the overall structure of the pod system,emphatically studies the design of hardware and implementation of software about control system that based on DSP-TMS320F28335.This system can accurately search and track the target,and ensure Visual axis is always stable In the process of tracking,it has played an important role in isolating disturbance effectively.
gyro;stable technology;pod system
TP273
A
1672-545X(2016)05-0095-04
2016-02-04
汪丹丹(1985-),女,江苏淮安人,助教,研究生,主要研究方向:飞机特种设备。