潜艇隐蔽突破反潜潜艇封锁区域能力评估模型研究*
2016-09-09蔡云祥陈雄民
蔡云祥 初 磊 陈雄民
(海军潜艇学院 青岛 266071)
CAI Yunxiang CHU Lei CHEN Xiongmin
(Naval Submarine Academy, Qingdao 266071)
潜艇隐蔽突破反潜潜艇封锁区域能力评估模型研究*
蔡云祥初磊陈雄民
(海军潜艇学院青岛266071)
利用连续马尔可夫链模型描述了潜艇在突破敌方潜艇封锁区域时先敌发现的能力,并结合其首先发现目标后规避的可能性,建立了评估潜艇隐蔽突破敌潜艇封锁区域能力的模型,可为对潜指挥与控制提供重要参考。
潜艇兵力; 反潜作战; 封锁区
CAI YunxiangCHU LeiCHEN Xiongmin
(Naval Submarine Academy, Qingdao266071)
Class NumberE911
1 引言
潜艇反潜的最大特点之一就是双方处于几乎一致的战术环境之中。特别是在双方观察器材和安静性能接近的情况下,搜索者和被搜索者都有可能先于对方发现目标[1~4]。本文利用连续马尔可夫链模型描述潜艇(以下简称突破艇)突破敌方潜艇(以下简称搜索艇)封锁区域时双方先敌发现的过程,并结合突破艇首先发现目标后成功规避的可能性,构建了评估潜艇隐蔽突破敌潜艇封锁区域的概率。
2 双方潜艇的先敌发现概率模型
潜艇在突破敌方潜艇封锁区域时,双方潜艇的搜索过程可以被认为是一个时间连续、状态离散的马尔可夫过程[5~6]。由搜索艇和突破艇组成的系统应当包括以下三种状态(参见图1):
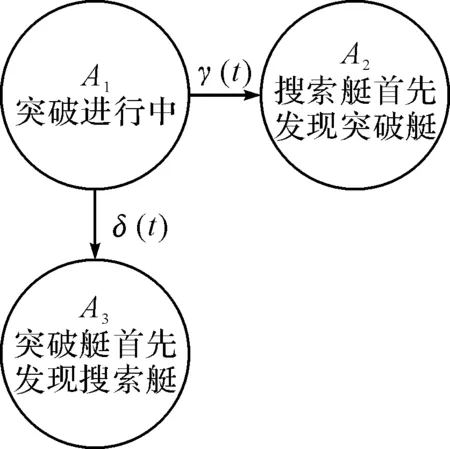
图1 隐蔽突破过程的系统状态转移图
A1:突破艇和搜索艇互不发现,双方的搜索行动在区域内进行;
A2:搜索艇首先发现突破艇,隐蔽突破过程结束;
A3:突破艇首先发现搜索艇,突破艇转入规避机动。
假设搜索艇和突破艇的搜索强度分别为γ(t)和δ(t),则利用连续马尔可夫链原理,该搜索系统可以由如下模型来描述[7~8]:
(1)
其中,Pss(t)、Pdx(t)、Pwx(t)分别为系统在时刻t处于状态A1、A2、A3的概率。
假设突破开始的初始时刻搜索艇和突破艇首先发现对方的概率分别为λ1和λ2,则微分方程组(1)应当满足下述初始条件:
(2)
如果记潜艇突破结束的时刻为T,则该值可以表示为T=S/Vtp。其中,S为潜艇的突破纵深,Vtp为潜艇的突破速度。根据式(1)、式(2),系统在突破结束的T时刻处于状态A1、A2、A3的概率分别为
(3)
对于搜索强度为常值的情况,即γ(t)=γ,δ(t)=δ时,式(3)可以简写成:
(4)
3 突破艇的规避概率模型
在突破艇先敌发现的情况下,可以理解为在当时的战术态势下突破艇的发现距离大于搜索艇。如果前者的规避速度大于后者的搜索速度,则突破艇必然能够规避成功,即Pgb=1。当突破艇为了避免因提高规避速度导致噪声增大,被搜索艇发现,而采用低于后者的速度规避时,突破艇只能在一定的目标舷角范围之外才能成功实施规避。如图2所示。Dss为搜索艇的发现距离;Dgb为突破艇开始规避时与搜索艇的距离。显然,突破艇在开始规避时只有处于弧段C1C2以外,即在搜索艇的舷角[-Xd,Xd]范围之外,才能避免被搜索艇发现,实现规避的目的。因此突破艇避免被搜索艇发现的概率为:
Pgb=1-P(-Xd≤q≤Xd)
=1-P(Q-α≤q≤α-Q)
(5)


图2 突破艇规避可能性示意图
(6)
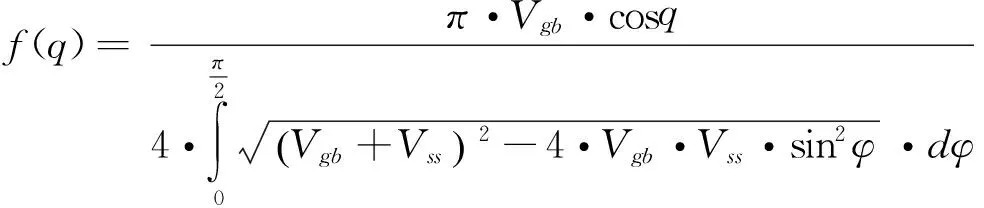
因此,突破艇出现在搜索艇[Q-α,α-Q]舷角范围内的概率可以按下式计算:
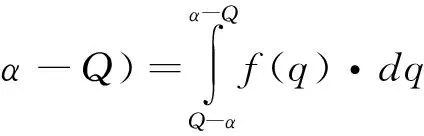
(7)
4 突破能力评估模型
突破艇在通过搜索艇的封锁区域时,通常采用隐蔽突破的方法。 即在首先发现搜索艇的情况下,
采取适当的措施驶离其搜索带,力争隐蔽脱离接触,避免被搜索艇发现。因此,潜艇隐蔽突破敌潜艇封锁区域的概率(Ptp)可以按下式计算:
Ptp=Pwx·Pgb
(8)
其中,Pwx为突破艇首先发现搜索艇的概率;Pgb为突破艇首先发现目标后采取措施成功规避搜索艇的概率。
5 结语
基于马尔科夫链,提出了敌我双方潜艇的先敌发现概率模型,研究了突破潜艇的规避敌潜艇概率模型,从而提出了突破潜艇的总体突破概率模型,这一方式贴近战场时间,对于对潜指挥与控制具有重要参考价值。
[1] 阿勃楚克.搜索目标法[M].北京:海潮出版社,1982:30-36.
[2] 张林根,张琼.舰艇水下非声隐身试验与测试技术发展与展望[J].计算机测量与控制,2009(4):23-24.
[3] 刘强.国防系统分析法[M].北京:国防工业出版社,2003:25-40.
[4] 何琳.潜艇声隐身技术进展[J].舰船科学技术,2006(S2):12-14.
[5] 张最良.军事运筹学[M].北京:国防工业出版社,1993:50-55.
[6] 孟晓宇,肖国林,陈虹.国外潜艇声隐身技术现状与发展综述[J].舰船科学技术,2011(11):54-55.
[7] 林立,俞孟萨,伏同先.国外水面舰艇声隐身设计及控制技术概况[J].舰船科学技术,2005(2):23-25.
[8] 熊军,肖国林.援潜救生体系和系统的现状及发展趋势[J].船海工程,2007(2):34-35.
[9] 刘兴章,王大海,王雪山.“柯林斯”级潜艇噪声分析及其减振降噪措施[J].舰船科学技术,2010(9):12-14.
[10] 姜荣俊,何琳.有源振动噪声控制技术在潜艇中的应用研究[J].噪声与振动控制,2005(2):19-20.
Evaluation Model of Submarine’s Capability of Stealthily Breaking Through Adverse Submarine’s Blocked Area*
This paper describes the capability of detecting the adversary first when a submarine breaking through another submarine’s blocked area, analyzes the probability to avoid being discovered by the patrol submarine too, and sets up a model to evaluate the possibility of stealthy breaching. Commanding and controlling the submarine could be brought out important value.
submarine, anti-submarine operation, blocked area
2016年2月4日,
2016年3月20日
蔡云祥,男,博士,教授,研究方向:潜艇作战指挥。
E911
10.3969/j.issn.1672-9730.2016.08.009
