空间目标雷达截面积的测量理论与实践
2016-09-09马林
马 林
(中国电子科技集团公司 信息科学研究院,北京 100086)
空间目标雷达截面积的测量理论与实践
马 林
(中国电子科技集团公司 信息科学研究院,北京 100086)
文章从对空间目标雷达截面积测量的需求出发,给出了目标雷达截面积的基本概念与定义,对雷达截面积测量理论与方法进行了系统的阐述,并结合空间目标探测工程实际对测量精度做了理论分析,给出了常用的校准方法。
雷达截面积;空间目标;测量精度;校准
0 引言
空间技术对科学研究和国民经济的发展起着重要的作用,已成为高新技术水平、国民经济发展程度和综合国力的重要标志。随着人类航天活动的蓬勃发展,空间安全已经成为一个国际性的问题。其中空间碎片可能对在轨航天器和载人航天造成非常大的威胁,是近年来国际上最为关注的空间安全问题之一。中国国家航天局于1995年正式加入机构间空间碎片协调委员会(IADC),在参与国际交流与合作的同时,已着手建立空间环境监测预警体系,加强空间环境与空间碎片的监测能力。
碎片对在轨航天器造成严重的威胁,其破坏力来自它的速度。空间碎片和航天器撞击时的平均相对速度在10km/s以上,撞击时的动能巨大,且与碎片的尺寸、质量密切相关。空间碎片按尺寸大小大致可分为3类:大空间碎片(10cm以上),小空间碎片(1mm以下)和介乎大、小空间碎片之间的碎片[1]。空间目标观测的一个重要任务是获取空间目标的尺寸,其中目标雷达截面积(radar cross section, RCS)测量是一项重要指标。本文对有关的测量理论和实践进行阐述。
1 RCS的定义与概念
与光学望远镜通过被动地观测目标的反射光相比,雷达通过雷达波主动照射目标然后对回波信号进行处理完成目标探测。雷达截面积(RCS)是一个度量目标对照射电磁波散射能力的物理量,用于描述目标电磁波散射效率的幅度特性,其定义[1]为

其中:σ是雷达截面积;R是雷达与目标的距离;Es是雷达处收到的目标散射电场强度;Ei是目标处雷达入射波电场强度。
按照雷达方程[2],雷达的接收信号功率Pr是发射功率(Pe)、发射天线和接收天线的面积(Ae和Ar)、发射信号波长(λe)、目标到雷达的距离 ρt以及目标的雷达反射截面积Arcs的函数,即

目标的RCS特性取决于其材料特性、外形和观测方向,此外,还与目标大小与雷达信号波长的比值(rλ=lt/λ)有关,如图1[3]所示。RCS特性与光学测量系统的光强相似,单位为 dBm2,即Arcs[dBm2]=10×lg(Arcs[m2])。
当 rλ>10时,目标的电磁散射特性位于光学区,此时雷达信号在目标表面发生反射,类似光的镜面反射;当0.5<rλ<10时,目标的电磁散射特性位于谐振区,此时入射雷达信号与目标各散射中心的回波发生干涉;当rλ<0.5时,目标的电磁散射特性位于瑞利区,此时可以将目标看成体目标。在光学区,目标的雷达反射截面积Arcs与它的几何反射截面积At具有相似的幅度,即Arcs/At≈1.0=常数。而在瑞利区,随着目标尺寸的减小,RCS快速减小,Arcs与At之间的关系为(Arcs/At)∝(lt/λ)4。此时,目标的被检测概率也随之减小。在谐振区存在模糊,因此把测量得到的RCS转化为等效的几何反射面积时必须进行特殊处理。

图1 球体的RCSFig. 1 RCS of spheric object
2 RCS测量原理
2.1概述
根据定义,RCS取决于目标本身的特征,以及雷达收发系统相对目标的姿态取向。而事实上,RCS还与雷达的工作频率与测量的极化方式有关。在实际应用中,较难得到目标的姿态信息,因此一般给出RCS时间序列[3]。
图2为雷达观测空间目标的RCS时间序列举例。不同雷达观测的结果不尽相同,同一雷达不同时段、不同圈次的观测结果也不完全一样。
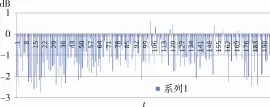
图2 雷达对空间目标观测的RCS时间序列举例Fig. 2 Examples of RCS sequence for radar measuring the space object
典型单站收发共用天线的雷达对目标进行观测时,RCS测量系统框图如图3所示。

图3 RCS测量系统框图Fig. 3 Block diagram of RCS system
2.2雷达方程
RCS测量基础是雷达方程,以目标雷达截面积为未知量的雷达方程[3]为

式中:σ为目标的雷达截面积;SNR为测量的功率信噪比;R为雷达至目标的距离;k为玻耳兹曼常数;Ts为系统噪声温度;L为系统损耗;P为发射的脉冲功率;τ为发射的脉冲宽度;Gt、Gr分别为天线的发射和接收增益;λ为工作波长;φN(N为扫描方向的天线单元数)为天线波束的扫描角。变量SNR、R、L、φN、τ在跟踪目标过程中变化较大,因此在每次探测中都要准确测定;常数项Gt、Gr、Ts在常规的工作中测量和标定,但这些值本身相对稳定。故雷达方程可表达为

其中:Pt为发射机功率;
2.3RCS测量方法
RCS测量方法有参数测量法和相对标定法两种。其中相对标定法是主要的测量方法。
参数测量法即根据式(1)直接计算出σ值。这种方法的缺点是:在一次测量中,即使是固定值的参数,如天线增益 G、接收机带宽 B、发射机功率Pt等,亦无法准确测定或计算;而系统噪声温度Ts也随天线仰角的变化而有小范围的变化;系统损耗 Ls也不能精确确定。这些因素的积累可能造成较大的测量误差。
相对标定法是利用雷达跟踪一个散射面积精确已知的标准目标(近距离测量可用直径已知的标准铝球作为标准目标,对空间探测可用直径已知的球形校准卫星作为标准目标),通过对诸如标校卫星等目标进行多次跟踪测量,可以得到常数项 Kk的校准值为

式中:i为处理的测量段;m为测量的次数。
在常数项校准时,要考虑不同扫描角度的电扫描损耗sec3θ0。天线扫描角θ0,即波束指向和阵面法线的夹角,是波束扫描指向大地方位角、大地俯仰角等参数的函数,即

式中:A为相对阵地法向的方位角;E为大地俯仰角;T为阵面倾角;Nt为正北方向与垂直于阵面平面之间的夹角。
因此,RCS推算公式可以表达为10lg σ =40× lgR+30lg(sec θ0) +SNR-20lgλ-k;然后再在跟踪待测散射面积的目标时,根据测得的目标距离R和信噪比SNR,计算出Ls值;再综合天线扫描性能及采用的雷达波形,利用标定的Kk值,代入式(2),计算出待测目标的散射面积。
2.4算例及步骤
大多数空间目标为不规则形状,其RCS随空间目标姿态和雷达观测角度的变化而变化,因此选择已知RCS稳定的雷达标校星进行捕获跟踪,记录跟踪工作方式下目标的距离、方位、仰角和信噪比信息,计算目标与法向夹角并推算电扫描损耗,统计出RCS测量所需的修正值k。
例如:选择国际编号为05398的雷达标校星(近似标准球体)进行跟踪,其RCS为0.827m2(-0.825dB),根据实测数据统计k值。
为了减小测量系数 Kk的误差,在标校算法中选取的测量值的信噪比大于20dB且目标仰角大于5°。确定 Kk之后,可以检查有效散射截面的测量精度并得到待测目标的RCS值。
雷达接收机的输出经过距离选通、数字中频采样送信号处理。信号处理根据数字脉压的结果对接收机的增益进行控制。
数据预处理接收从线性通道来的信号峰值电压(V)及接收通道的中频衰减(A),则可实时计算出接收到的脉冲功率为V2lg-1(A/10)。该脉冲功率与实际脉冲功率成比例。
在测量周期内对所有脉冲重复周期的计算值取平均,得到平均信号功率。读取目标当前距离值,并将每一功率值乘以距离的 4次方得到等效的反射功率。最后将反射功率与从标准目标得到的对应值比较,即得到真实的目标反射面积,从而得到目标的RCS时间序列。
3 RCS测量精度分析
测量目标的有效散射面积是在测量回波信号归一化电平的基础上获得的。为实现RCS的测量精度,要考虑和发射与接收特性有关的因素(距离、脉冲宽度、在电扫范围内的目标角位置、匹配损失等),以及接收通道传输系数的校正、辐射功率变化的检测、非最佳处理损失和跟踪误差的有效评估等。雷达方程中的所有常数,在确定校准系数时均考虑在内。正常工作时,与反射面积测量有关的测量数据有:接收系统测量支路输出的信号幅度、接收系统测量支路输出的监测信号幅度、目标距离、目标仰角、波束内目标的偏角、波束与阵面法线的偏角等。
因目标RCS的测量是通过相对测量方法得到的,如前所述,常数项 Kk的校准值及雷达方程分别为:

式中:Ai为接收机输出端测得的信号幅度;Aci、Aco分别为监测信号在接收机输入端和输出端的信号幅度。通过这样的相对测量可以去除雷达方程中标定不准确的系统误差分量。因此目标RCS测量精度主要取决于雷达测量精度、标称值的精度和标定剩余。相对校准法的基础是参考目标的RCS已知。用此法校准存在2项方法误差。
标准参考目标的制造和测量误差,造成反射截面的不确定性,据国外经验数据约为0.8dB。雷达各项测量误差,包括A、G、R、∆G、Pt、La等的测量与标定误差,它们的相对变化及修正剩余见表1。

表1 雷达各项测量误差的相对变化及修正剩余Table1 Relative deviations or calibration residues of errors
RCS的相对标准偏差为

将表1中参数代入式(4)可得该项相对标准偏差为0.45dB;再考虑校准目标的截面积不确定性0.8dB和标校常数的误差0.5dB,且各项误差相对独立,因此RCS测量总误差为上述误差项之和,即为1.75dB。
4 RCS标定方法
4.1RCS的校准测量
1)利用标校塔及转发机进行标定
在标校塔上设置转发机。转发机的天线增益、馈线损耗、输出功率事先经过校准。转发机的时延使雷达接收到的转发信号落在雷达近地杂波盲区之外,以消除地面杂波影响。该方法可记忆经气球标定的雷达参数和测量值,检验雷达参数 Kk的稳定性,用于日常标准参数的常规检查。
2)利用卫星进行标定
使用具有已知RCS值的标校卫星或其他编目低轨卫星进行标定。
3)利用月亮进行标定
这是俄罗斯空间目标测量雷达所用的标定方法。雷达采用远距离探测模式,即发射长脉冲并且长时间驻留,波束指向根据雷达站址的地理位置和天文星历表确定,并初步计算月球距雷达站址的距离以确定脉冲重复频率。月球的RCS可认为是常数,等于5.9×1011m2,精度为±1dB;月球与地球的距离同地面的观测点有关,估算为407000km。这种方法对于威力较大的大型空间目标观测雷达是可行的。
4.2对雷达设备的校准方法
接收机增益标定通过在输入端加入测试信号来测量校准,或在雷达的远场(或利用阵地周围的地物环境)架设测试塔。测试塔放置雷达信号转发器,分别用于RCS幅度标定和系统调试。
1)雷达接收通道特性的校准
在RCS测量过程中,为了压缩接收机的输出动态范围,采用了瞬时AGC控制技术,使跟踪检测信号达到最佳电平。AGC是用噪声电平归一化了的信号电平控制数控衰减器来实现的。接收机检测的回波信号电平是由AGC控制量和A/D变换输出值综合而得。中放增益的非线性、数控衰减器的量化及控制精度都将引入测量误差。其中,中放增益非线性、数控衰减控制精度为系统误差,在一次RCS测量过程中可认为其不变,并通过标校给出修正因子进行修正。
将接收机激励源产生的一路测试信号经精密衰减器由馈线校正网络入口输入主馈线,最大测试信号应足以使接收机饱和。将激励源信号降低到接收机灵敏度电平,对AGC起控电平进行校定。然后逐步增大测试信号电平和改变精密衰减器衰减量,使 A/D输出保持为某固定值。逐点记录一一对应的精密衰减器衰减量和数控衰减器衰减量。经处理得到不同信号电平时的数控衰减修正量,保存于计算机供查表修正。此方法包含了接收通道的非线性误差。
2)发射机功率监视器的校准
有时为了测量方便,需要改变发射机输出功率,或者存在由发射机输出功率的慢变化引入的测量误差,可以通过监测发射机实际输出功率进行修正。
功率监视器的校准在发射机调试阶段已经完成,以输出参考功率归一化发射机实际输出功率即可进行功率修正。
3)∆G的校准
被测目标偏离波束轴线,特别是多目标测量时的副目标是离散测量,偏离波束轴线角度可能较大,由此引起天线增益偏离参考值。增益变化引入的RCS测量误差的变化分量可以修正。
修正量∆G的校准包括两部分:第一部分是雷达和波瓣的方向图标准,这一项在雷达系统完成时已测得;第二部分是雷达测角系统的定向灵敏度,它由天线差波瓣归一化斜率和接收机增益决定。确定∆G的步骤是:由被测目标角误差电压的大小,按定向灵敏度确定目标偏轴角∆A、∆E;再由偏轴角和波瓣方向图确定修正量∆G。
5 结束语
本文通过对空间目标雷达截面积RCS测量的需求分析,回顾了RCS的基本概念与定义。对测量理论与方法进行了系统的分析,结合工程实际对测量精度做了理论分析,给出常用的校准方法。在实际应用中,还可以建立通用分析工具,作为不同雷达的应用基础,以促进空间目标观测雷达的技术进步,并不断提高空间目标观测应用水平。
(References)
[1] 黄培康, 殷红成, 许小剑. 雷达目标特性[M]. 北京:电子工业出版社, 2005:11
[2] SKOLNIC M I. 雷达手册[M]. 3版. 南京电子技术研究所, 译. 北京:电子工业出版社, 2010:9
[3] 马林. 空间目标探测雷达技术[M]. 北京:电子工业出版社, 2013:28; 41
(编辑:闫德葵)
Theory and practice of radar cross-section measurement of space objects
MA Lin
(Information Science Academy of China Electronics Technology Group Corporation, Beijing 100086, China)
Based on the requirement for measuring the radar-cross-section (RCS) of space objects, this paper reviews the concept of RCS, the theory and the method of RCS measurement. The measurement precision and its influencing factors are analyzed, and some calibration methods are proposed.
radar cross-section; space objects; measurement precision; calibration
V556.6
A
1673-1379(2016)04-0349-05
10.3969/j.issn.1673-1379.2016.04.002
2016-05-29;
2016-07-29
马 林(1965—),男,硕士学位,研究员,研究领域为空间目标探测雷达系统与信息处理。E-mail:malin01@aliyun.com。
