基于联合双重概率矩阵的动态规划检测前跟踪算法
2016-09-08梁志兵
梁志兵, 王 睿, 武 勇, 张 豪, 张 勃
(1.空军工程大学 防空反导学院,陕西 西安 710051;2.计量科学研究院,陕西 西安 710065; 3.中国人民解放军95948部队,甘肃 酒泉 735000)
基于联合双重概率矩阵的动态规划检测前跟踪算法
梁志兵1, 王睿1, 武勇2, 张豪1, 张勃3
(1.空军工程大学 防空反导学院,陕西 西安 710051;2.计量科学研究院,陕西 西安 710065; 3.中国人民解放军95948部队,甘肃 酒泉 735000)
为在较短时间内实现对弱小目标更为精确稳定的跟踪检测,提出一种基于联合双重概率矩阵的动态规划检测前跟踪(TBD)算法。利用联合双重概率矩阵算法对异类多传感器数据进行概率化融合处理,并将得到的概率矩阵作为TBD算法的输入量测空间,利用动态规划TBD算法得到目标轨迹。仿真实验表明:该算法能够融合利用异类多传感器数据,在较短时间内实现对弱小目标更为稳定有效的跟踪检测。
联合双重概率矩阵; 动态规划; 检测前跟踪; 异类多传感器
0 引 言
目前,对于弱小目标的检测问题,典型的方法是检测前跟踪(track-before-detect,TBD)技术[1]。现有的TBD技术主要包括基于粒子滤波的方法[2,3]、基于Hough变换的方法[4,5]、基于动态规划的方法[6~9]以及基于概率假设密度的方法[10]等。其中,基于动态规划(dynamic programming,DP)的TBD(DP-TBD)算法是一种有效的弱小目标跟踪检测方法。
当前的DP-TBD技术主要集中在单传感器应用,但是某些高速弱小目标时敏性强,其会在较短时间内发生严重的距离走动,使得基于单传感器的TBD技术对其跟踪检测性能较差。而近年来,随着通信能力的不断发展,利用传感器网络进行警戒发现、融合跟踪等领域的研究变得越来越重要[11]。文献[12]提出一种联合概率密度矩阵算法,利用概率网格处理不同精度异类多传感器数据,可有效解决多传感器定位与数据融合问题。
对此,针对异类多传感器数据融合,本文研究一种基于联合双重概率矩阵(joint dual probability matrix,JDPM)的单目标DP-TBD算法。仿真实验表明:本文算法能够在较短时间内对弱小目标实现更为精确稳定跟踪检测。
1 目标模型与观测模型
考虑目标在x—y平面内匀速直线运动,在时刻t,目标的状态变量为
Xt=[px,tvx,tpy,tvy,t]T
(1)
式中px,t,py,t为目标在x和y方向上的位置信息,vx,t,vy,t为目标在x和y方向上的速度信息。
假设目标状态转移服从马尔科夫模型,且过程噪声服从高斯分布,则
Xt|Xt-1∶N(·;FXt-1,Q)
(2)
式中状态转移矩阵F和噪声方差矩阵Q分别为
(3)
式中T为帧间时间间隔,I2为2×2阶的单位矩阵, 表示直积,常数κ用来衡量过程噪声强度。
多传感器系统搭建在二维平面上不同位置,且各个传感器的测量精度不同。设每次扫描杂波个数服从泊松分布P(λ),且杂波在探测区域内均匀分布。雷达和红外传感器的测量点迹信息可分别表述为
radar-plot={距离r,方位角φ,时戳t,信号幅值I}
(4)
infrared-plot={方位角φ,时戳t,信号幅值I}
(5)
式中时戳t为传感器获得点迹的时刻。为方便计算与表达,假设两类传感器接收的信号幅值I的概率密度函数均服从瑞利分布[6,7],即
(6)
式中SNR为期望的目标回波信噪比。
2 算法原理
首先利用JDPM算法对K帧多传感器测量数据分别进行融合处理,并将得到的K个概率矩阵作为本文TBD算法的输入量测空间,然后通过单目标(single target,ST)DP-TBD(ST-DP-TBD)算法得到目标航迹,算法流程框图见图1。
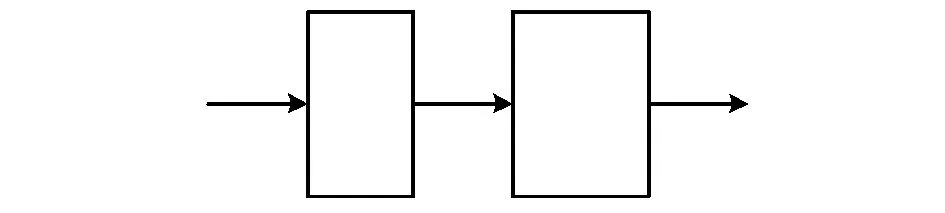
图1 算法流程框图
2.1JDPM算法
多传感器数据融合需要将不同传感器在极坐标系下观测数据转换到统一直角坐标系下进行,但各传感器测量精度和观测数据的表达形式各不相同,这就导致数据关联难以准确、有效地进行。
对此,本文借鉴文献[12]概率网格思想,提出一种JDPM算法,可有效解决多传感器数据关联时测量精度不一、同类传感器对不同量测信号幅值不同、异类传感器对同一量测的信号幅值不同等问题。
假设系统中共有N1部雷达和N2部红外传感器,其测量值的概率网格表示如下:

(7)
则空间一点(x,y)存在目标的概率为
(8)


(9)
由于没有距离信息,无法对目标进行定位,故假定距离信息在rmin和rmax之间均匀分布,则空间一点(x,y)存在目标的概率为
(10)
式中φ′=arctan(y-yj)/(x-xj)。
设雷达观测空间长L,宽M,通过概率网格划分法将其离散化,如图2所示。方格尺寸为Δx×Δy,方格数量为NM×NL,其中NM=M/Δy,NL=L/Δx。根据高斯分布快速衰减特点,可认为量测σ区域外的概率为0[12],即只考虑图2中阴影区域内方格的概率。可根据式(8)和式(10)分别求得两种传感器观测时每个方格存在目标的概率
(11)
式中C为归一化常数,且
(12)
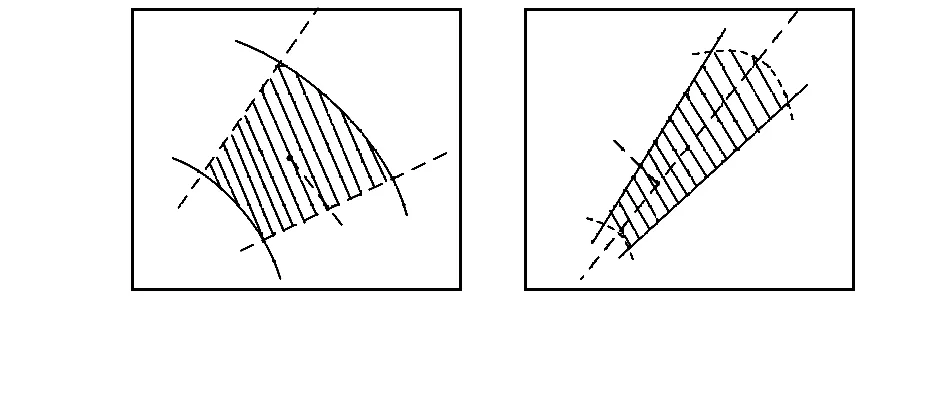
图2 目标存在区域网格

将传感器s的所有量测对应的Ptsm合并,对于第l,w个方格,有
(13)
式(13)计算出了时刻t各传感器探测区域内方格存在目标的概率分布及其幅度值源于目标的概率值,则可根据式(14)得到目标的联合概率分布矩阵Pt,对于第l,w个方格,有
(14)
然后找出矩阵Pt(l,w,1)中元素为0的位置,并将Pt(l,w,2)在这些位置上的元素设置为0。此时,矩阵Pt描述了目标在 时刻所有传感器探测下目标存在的联合概率分布及其幅度值源于目标的联合概率,故称其为联合双重概率矩阵。
2.2单目标DP-TBD算法
令2.1节论述的概率网格作为DP-TBD算法的量测空间,有NM×NL个分辨单元,这相似于传统DP-TBD算法的状态空间离散化问题[1,7],并将k帧多传感器数据融合分别得到的联合双重概率矩阵作为DP-TBD算法的输入值。
本文提出一种新颖的ST-DP-TBD算法,其将空间单元格存在目标的概率、单元格幅度值源于目标的概率以及目标的状态转移概率作为值函数的累积量,能够更准确地得到目标位置,具体流程为:
1)初始化:对k=2时的所有目标状态,

(15)

(16)



(17)

(18)
式中logp(Xk|Xk-1)体现目标的运动特性。
3)迭代结束与航迹回溯
(19)
如果I(XK)>VT,其中,VT为设定的值函数门限,那么对于k=K-1,…,1,有
(20)
3 仿真分析
设观测空域为x轴:0~30 km;y轴:10~35 km,且存在单目标进行匀速直线运动,每次扫描杂波个数服从参数λ=50的柏松分布[13],且杂波在空域内服从均匀分布。雷达和红外传感器的布置位置与工作情况见表1。
首先定义所需的性能指标[7]:
1)目标检测概率(PD):算法估计的目标最后一帧的状态位置与真实目标位置误差小于2个方格,且估计的目标速度与真实目标速度一致。

表1 传感器布置和工作情况
2)航迹均方根位置误差(RMS):表征估计目标航迹与真实目标航迹各帧状态位置之间的平均差异,并用方格边长的倍数来衡量这个参量。
为了验证本文算法性能,设置两种仿真场景。场景1:雷达1和前3部红外传感器同时工作;场景2:2部雷达和4部红外传感器全部工作。这里将传统DP-TBD算法和本文算法进行仿真对比,设置概率网格和传统DP-TBD算法空间分辨单元方格的边长均为80 m,传统DP-TBD算法利用雷达1进行目标探测,两种算法总扫描次数均为K=12,则完成整个跟踪检测过程,传统DP-TBD算法需要22 s,而本文算法只需5.5 s。蒙特卡洛仿真次数为500次。
图3和图4分别给出了传统DP-TBD算法和本文算法在两种场景下的目标检测概率PD和均方根位置误差RMS与SNR的关系。由图3可得:随着SNR的增加,两种算法均能对所有目标进行有效检测。本文算法的PD明显高于传统DP-TBD算法的PD,且本文算法在场景2下的PD高于场景1下的PD。由图4可得:与传统DP-TBD算法相比,本文算法的RMS整体较低,且本文算法场景2下的RMS要低于场景1下的RMS,特别是在信噪比较低的情况下,本文算法的性能更优。

图3 PD对比图
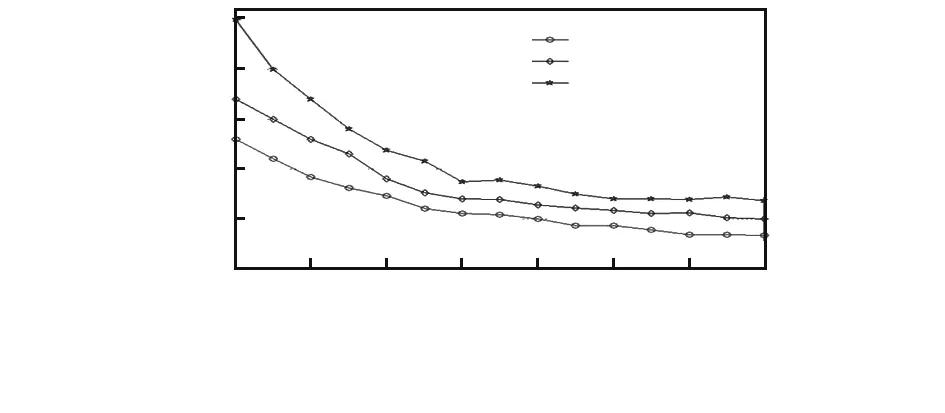
图4 RMS对比图
4 结 论
本文研究了一种基于异类传感器数据融合的DP-TBD算法。通过JDPM算法融合处理每帧异类传感器数据,并将得到联合双重概率矩阵作为本文TBD算法的量测空间,然后利用ST-DP-TBD方法处理矩阵数据,最后得到目标轨迹。仿真结果表明:本文算法能够在较短的扫描时间对弱小目标,特别对于低信噪比目标,实现有效稳定的跟踪检测。另外,通过分析算法不难得出,传感器数目越多,算法的性能越好,且当某一传感器受到干扰时,其它传感器仍然能够有效工作。
[1]Yi Wei,Kong Lingjiang,Yang Jianyu.Thresholding process based dynamic programming track-before-detect algorithm[J].IEICE Transaction on Communication,2013,E96-B(1):291-330.
[2]Fanaswala M,Krishnamurthy V.Syntactic models for trajectory constrained track-before-detect[J].IEEE Transactions on Signal Processing,2014,62(23):6130-6142.
[3]欧阳成,华云,高尚伟.改进的多贝努利滤波检测前跟踪算法[J].系统工程与电子技术,2013,35(11):2244-2250.
[4]Spak J,Moyer L R,Lamanna P.A multi-dimensional Hough transform-based track-before-detect technique for detecting weak targets in strong clutter backgrounds[J].IEEE Transactions on Aerospace Electronic Systems,2011,47(4):3062-3068.
[5]Sahin G,Demirekler M.A multi-dimensional Hough transform algorithm based on unscented transform as a track-before-detect method[C]∥Proceedings of The 17th International Conference on Information Fusion,2014:1-8.
[6]Huang Dayu,Xue Anke,Guo Yunfei.Penalty dynamic programming algorithm for dim targets detection in sensor systems[J].Sensors,2012,12(4):5028-5046.
[7]Yi Wei,Mark R M,Kong Lingjiang,et al.An efficient multi-frame track-before-detect algorithm for multi-target tracking[J].IEEE Journal of Selected Topics in Signal Processing,2013,7(3):421-434.
[8]Grossi E,Lops M,Venturino L.Track before detect for multi-frame detection with censored observations[J].IEEE Transactions on Aerospace and Electronic Systems,2014,50(3):2032-2046.
[9]Grossi E,Lops M,Venturino L.A novel dynamic programming algorithm for track-before-detect in radar systems[J].IEEE Tran-sactions on Signal Processing,2013,61(10):2608-2619.
[10] 占荣辉,刘盛启,欧建平,等.基于序贯蒙特卡罗概率假设密度的多目标检测前跟踪改进算法[J].电子与信息学报,2014,36(11):2593-2599.
[11] 范恩,谢维信,刘宗香.异类传感器合成量测的模糊航迹起始方法[J].信号处理,2013,29(11):1439-1445.
[12] Zhao Zhichao,Wang Xuesong,Xiao Shunping,et al.Grid-based probability density matrix for multi-sensor data fusion[C]∥IEEE Prime Asia,2009,Shanghai,2009:205-208.
[13] 何友,修建娟,关欣.雷达数据处理及应用[M].3版.北京:电子工业出版社,2013.
Dynamic programming track-before-detect algorithm based on joint dual probability matrix
LIANG Zhi-bing1, WANG Rui1, WU Yong2, ZHANG Hao1, ZHANG Bo3
(1.Air and Missile Defense College,Air Force Engineering University,Xi’an 710051,China;2.Shanxi Institute of Metrology,Xi’an 710065,China; 3.Unit 95948 of CPLA,Jiuquan 735000,China )
To track and detect dim targets more precisely and stably in less time,a dynamic programming track-before-detect(TBD)algorithm based on joint dual probability matrix is proposed.Firstly,by utilizing joint dual probability matrix algorithm,data of heterogeneous sensors are transformed into probability-values in probability matrices,which are used to be the input measurement-spaces of TBD algorithm.Then the target-track is obtained by a novel single-target dynamic programming TBD algorithm.Simulation results show that this algorithm is more suitable and stable for tracking and detection of dim targets by fusing multi-sensor measurements.
joint dual probability matrix; dynamic programming; track before detect; heterogeneous sensors
10.13873/J.1000—9787(2016)09—0126—04
2015—11—20
TN 957
A
1000—9787(2016)09—0126—04
梁志兵(1990-),男,山西吕梁人,硕士生,主要研究方向为弱小目标检测。
