基于传感器的汽车主动安全设计
2016-09-08陈立娇
陈立娇, 许 勇
(桂林电子科技大学 电子工程与自动化学院,广西 桂林 541004)
基于传感器的汽车主动安全设计
陈立娇, 许勇
(桂林电子科技大学 电子工程与自动化学院,广西 桂林 541004)
从汽车主动安全方面进行研究, 通过对车辆道路行驶时关键要素的危险状态识别,实现完善汽车主动安全性能。本设计采取自动控制方法,通过研究汽车防碰撞检测和预防以及偏离车道报警,为汽车安全系统提供信息支持,实现车辆主动避免碰撞危险,减少或避免交通事故发生,大大提高汽车行驶主动安全性。所设计汽车主动安全防撞系统主要包括激光防撞测距、激光车道检测、报警警示系统等。
汽车主动安全; 防碰撞; 激光测距; 车道偏离报警; 汽车电子
0 引 言
汽车是现今人们最常使用的交通工具之一,而它在为人类提供极大便利的同时,也带来了巨大的安全隐患。据统计,中国每年发生交通事故50万起,因交通事故死亡人数超过10万人,稳居世界第一[1]。
在对大量交通事故发生原因进行总结分析后发现,引起交通事故的主要因素为环境因素、司机因素和车辆因素。其中又以司机因素最为突出,包括由于司机本身因疏忽大意、疲劳驾驶、酒后驾车、判定失误和超速行驶等[2]不良驾驶行为引起的交通事故。尤其是遇到冰雹、雨雪和大雾等恶劣天气时,此时路面湿滑且能见度低,如果驾驶员注意力稍不集中,极易造成车辆发生车道偏离与追尾碰撞,导致交通事故的发生[3]。要知道每四个驾驶员中就有一个驾驶员经历过因车道偏离引起的伤亡事故[1]。如何避免由于人为因素导致的交通碰撞事故,提高车辆的安全性能成为本次研究重点。
1 车辆安全性能分类
在汽车安全技术领域有两种途径提高车辆安全性能,即被动安全技术和主动安全技术。被动安全技术是指在事故发生时和发生后通过安全气囊、安全带等设备来保障人们的安全。而这只是降低了车内乘员的受伤程度以及车辆的损坏程度,并没有从根本上解决交通安全问题。主动安全技术分为正常行驶时的预防安全技术和事故发生前的事故安全技术。具体为在事故发生前提醒驾驶员道路危险状况,引起驾驶员的注意方便其进行合理的规避操作,预防交通事故的发生,从而保证车辆行驶时的道路安全[4]。
相对于被动安全技术减弱或缓解事故伤害的功能,主动安全技术可以在事故发生前及时监测潜在不安全因素,对驾驶员不当的驾驶行为进行预警或干涉,保证行驶安全[5]。因此,设计一种辅助驾驶员工作的主动安全系统,在车辆行驶遇到意外状况时,能为驾驶员争取更多的反应时间,预防交通事故的发生是本次研究的重点。
2 系统整体设计思路
设计一个基于汽车主动安全的安全驾驶辅助控制系统,从汽车防碰撞预防系统以及偏离车道报警系统两方面来进行研究。通过安装在车辆前端的目标探测装置(激光传感器)实时监测车辆周围行驶环境,自动识别前方障碍物距离与实时行驶轨道,分析当前行驶状况。如有危险或偏移轨道现象,系统自动报警并提前采取措施避免事故发生。
目标探测装置主要是对路况进行实时监测,检测行驶车辆与前方车辆的障碍物距离,以及监控车辆行驶车道是否正确,预防车辆追尾及车道偏离。目标探测装置最主要就是传感器的选择。
2.1传感器的分析和选择
所设计系统采用的传感器在车辆行驶过程中主要提供三种信息:1)附近障碍物的存在信息;2)障碍物与小车间的距离信息;3)车道偏离检测信息。目前,常用的车载目标探测装置采用的传感器主要有三类:光学类:如无源红外线、激光雷达及视频成像系统;电磁类:如连续波雷达、单脉冲雷达及电容式传感器等;声学类:如超声波传感器。
视觉传感器提供信息量最大,但需要的计算资源和机时也最大,处理速度慢,且易受光线条件和工作范围的限制。雷达传感器对环境影响不敏感,远距离探测能力较强,但易受周围环境电磁干扰,设备成本教高,实际应用不广泛。
超声波传感器其受温度、湿度影响大,且存在测量盲区,过大障碍物可能发生镜面反射。红外传感器虽然不受电磁波和可见光影响,还可在夜间测量,但易受物体颜色、周围光线影响,误差较大,测距范围也较小。
而激光传感器能实现无接触远距离测量,且量程大、精度高、速度快,抗光、电干扰能力强,特别是随着技术和市场发展,成本降低,适合大范围应用。
综上所述,所设计系统采用激光传感器制作目标探测装置。
2.2激光传感器
目标探测装置的激光传感器主要由5 mW的激光发射管、调制管、激光接收管以及滤光镜所组成。由于激光传感器输出的是模拟值,而且加入了激光滤光镜片,所以可见光的影响可以忽略不计,能达到最大检测距离3 m。应用激光传感器的目标探测装置主要分为防撞检测和路径检测两个功能模块。
2.2.1防撞检测模块
防撞检测模块主要是用来测量障碍物的距离,判断障碍物的位置,并给出预警信息。本次设计采用激光传感器作为激光的发射和接收装置。具体电路框图如图1所示。
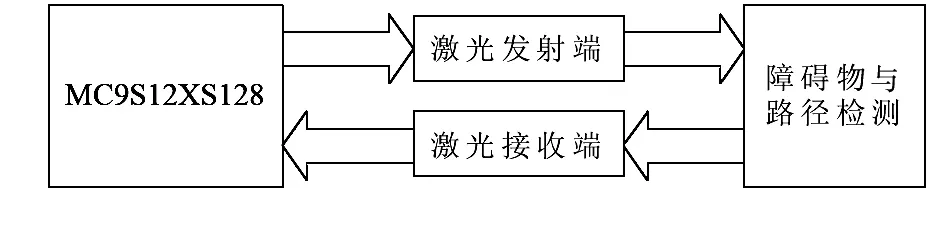
图1 激光传感器工作示意图
具体实现过程为:单片机发送发射激光命令,激光传感器接收到此命令就发射激光,如有障碍物则激光传感器的接收装置接收此命令,并发送回单片机接收。其中,激光传感器采集的信号通过单片机的AD引脚被读取,8位精度AD采集的信号值范围为0~255;12位精度AD采集的信号值范围为0~4 095。0表示被检测的物体超出检测范围或者无障碍物体,255表示距离障碍物的距离极近。因此,可以通过0~255的数值变化来判断车辆与障碍物之间的距离关系。传感器硬件设计上添加了信号指示灯,通过信号灯的亮暗变化也能直观地看出障碍物与传感器的距离变化。具体系统框图如图2所示。

图2 防撞检测模块系统框图
2.2.2路径循迹模块
检测车辆行驶是否发生偏移,即行驶在黑色路径内,如偏移到白色道路线上则发出报警信息,提醒驾驶员目前发生车道偏移,保证车辆安全行驶。
具体实现过程为:激光传感器发射激光,当检测到是黑色地面时,输出高电平给单片机;如检测到白色道路线时,发送低电平给单片机,提示单片机已发生车道偏移,单片机控制电路发出预警信息,提醒驾驶员注意行驶安全。具体系统框图如图3所示。
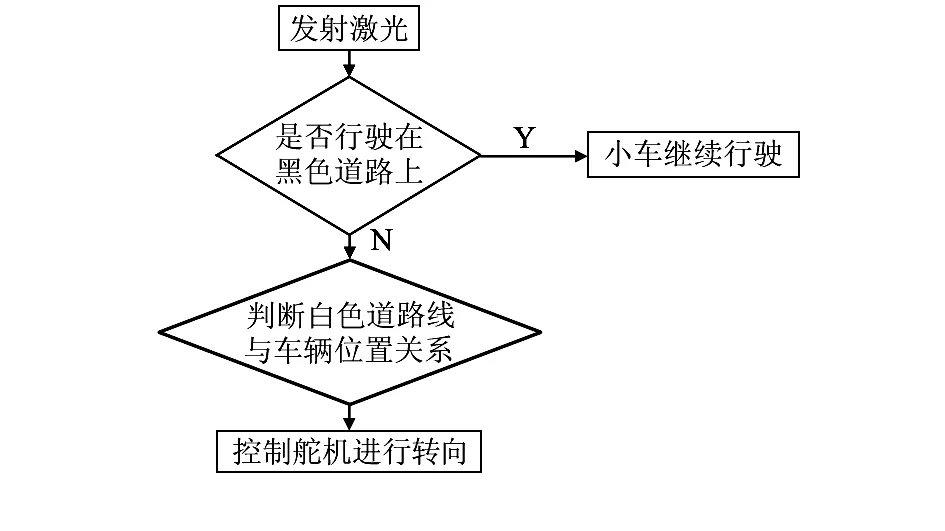
图3 路径循迹模块系统框图
3 系统设计方案
本设计方案和算法需要在模拟车辆上进行实验,验证汽车主动安全中防撞检测预防及车道偏离报警技术的可行性。模拟智能小车采用飞思卡尔MC9S12XS128单片机作为整体核心控制单元,设计各个所需功能模块和硬件电路, 包括电源模块、电机驱动模块、速度数据检测模块、舵机驱动转向控制模块以及防撞检测模块为主要所需功能模块,具体系统电路框图如图4所示。并且在Freescale Code Warrior编程软件环境下对飞思卡尔单片机进行编程与调试。此次系统软件设计采用模块化结构设计模式,其中主程序主要起到一个导向与决策的功能,具体功能实现则需要对各个功能模块的子程序进行设计。
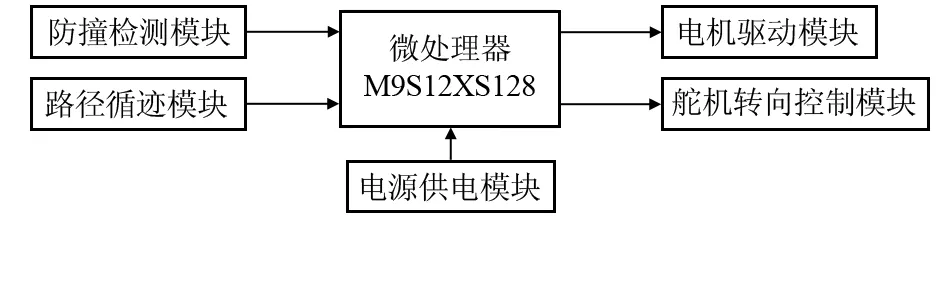
图4 系统框图
3.1核心控制模块
本次智能小车设计采用飞思卡尔MC9S12XS128单片机作为核心控制芯片,这是一款针对汽车电子市场推出的高性能16位单片机,因此广泛应用于车辆控制邻域。该芯片具有功能强大、处理速度快、功耗低等优点,且成本低适合于小车制作使用。
为了避免出错时检测、维修困难等问题,也为了提高整个核心系统板的稳定性以及实用性,自行设计最小系统板来满足本次设计的要求。最小系统板主要包括复位电路、式中电路以及BDM下载接口电路等[6]。
3.2电源模块
整个硬件电路电源均由电源模块提供,因此,可靠的电源模块设计方案是整个智能小车稳定行驶的重要前提。
考虑到不同模块需要电压不同有5,6.5,7.2 V的,因此智能车电池电压需要变换电压7.2 V为5 V和6.5 V方便为所有电路提供合适电源。其中,7.2 V电压可为电机直接提供电源;舵机驱动电路需要6.5 V电压为其供电;单片机、传感器等则需要5 V电压为其供电。具体电源管理系统图如图5所示。
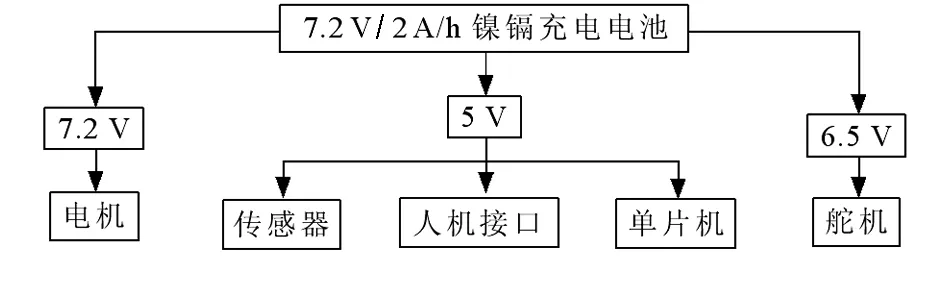
图5 电源管理系统图
3.3驱动模块
智能小车采用RS540型直流电机,驱动方式主要有三种可以选择:1)借助于CMOS管,其提供的H桥内阻小方便驱动电路,但同时也易产生锁定效应,烧毁芯片。2)采用BTS7960芯片,这是一种半桥的电机驱动芯片。BTS7960芯片可结合其他BTS7960芯片形成全桥和三相驱动电路,但其价格是MC33886芯片的一倍以上。3)采用飞思卡尔MC33886芯片,这是飞思卡尔公司生产的一种全桥驱动芯片。具有过流、欠压、过温保护等功能,但易发热,如采用多片并联则可大幅度降低其发热状况,与场效应管一起搭建电路能达到最大110 A的驱动电流。
综上所述,此次设计选用的是第三种方案,即借助于MC33886芯片来完成电机驱动电路。
3.4舵机转向控制模块
智能小车转向主要靠前轮转向来实现的,要想实现前轮转向则需要一个控制装置,这就是舵机。舵机通过拉杆与前轮相连接,并通过带动拉杆来实现对前轮转向的控制。舵机转向模块的主要工作流程为:智能小车核心芯片发出PWM波信号,PWM占空比不同,输出的的脉冲宽度也不同,根据脉冲信号的不同宽度则可以改变舵机输出舵盘的角度,以此来控制小车的转向。
现以PWM信号周期是20 ms为例来说明不同占空比对舵机转向角度的影响。当高电平脉宽为0.5 ms时,舵机向右转90°;当脉宽为1ms时,舵机右转45°;当脉宽为1.5 ms时舵机保持直行;当脉宽为2 ms时舵机左转45°;当脉宽为2.5 ms时,舵机左转90°。即PWM的脉宽与舵机的转向角度呈现一一对应的线性关系。
3.5速度控制模块
检测智能小车的实际行驶速度时,如采用程序测定所给定的值,由于电池电压路况等一些额外因数,与实际值会有一定差距。因此,需要安装一个车速检测装置来测量智能小车的实际车速,此次设计采用光电编码器来进行测速。即用一个支架把光电编码器固定在智能小车后部,通过齿轮与车轮相连,车轮每转动一齿,传感器都会检测到,并向MCU输出脉冲一次。设置MCU的相应模块,捕捉输出的脉冲信号。通过记录相邻脉冲的间隔时间或一段时间内接收到的脉冲数,即可以计算出智能小车的实际车速。通过旋转型光电编码器来测定小车实际速度。再通过控制单片机发出的PWM的脉冲宽度,来调节电机两端的电压,进而控制电机的转速快慢。
4 系统验证与总结
4.1实验系统与环境
整个实验系统是在自行仿真模拟真实道路上进行的。在车辆行驶前方放置障碍物,验证智能小车是否会自主避障,设置当障碍物距离为50 cm时,进行自主避障。其中避障距离可调,可自主确定车辆与障碍物之间的避障距离。以及当车辆偏离车道时,蜂鸣器是否会报警提醒发生车道偏移。
4.2实验验证与结果
模拟实际交通道路避障实验可得,激光传感器测距可达3 m,即小车与前方障碍物的距离为3 m时,小车发现前方存在障碍物。经实验验证,当车辆距离前方障碍物50 cm时,车辆发现障碍物存在信息并停止行驶,平均误差5 cm。现列举实验结果数据如下表1所示。由于实验条件等因素,实验误差在允许范围之内,验证了汽车防碰撞检测和预防功能的可行性以及可靠性。
将小车放置车道线附近大约5 cm处,小车发出报警信息,预示车道已发生偏离,提醒注意此时已发生道路偏移,并控制小车回到正常行驶车道上来。实验验证了汽车偏离车道报警系统的可靠性和实用性。

表1 仿真实验结果
5 结 论
经过实验验证,设计制作的智能小车基本实现防撞检测和车道偏离报警系统功能,模拟实现了对车辆道路行驶时关键要素的危险状态识别。随着各种新技术以及设备在汽车上的使用,增加了车辆在道路行驶时的安全性与可靠性。而如何通过新技术新手段实现对道路危险状态的识别,从而降低道路交通事故率,保障人们的出行安全是今后发展的目标,也是发展汽车安全技术的意义。
[1]吕柯岩,朱朋,贺柏根,等.单目智能车道偏离预警系统[J].液晶与显 示,2012,27(4):545-551.
[2]李昌吉.汽车驾驶员的人为因素与交通安全[J].疾病控制杂志,2004,8(6):576-578.
[3]王建军,王军锋,毕明涛.区域公路交通事故及高速公路交通事故特征[J].长安大学学报:自然科学版,2005,25(3):66-69.
[4]旷彪.汽车追尾防碰撞控制系统的研究与仿真[D].长沙:长沙理工大学,2011.
[5]彭金栓,徐磊,邵毅明.汽车主动安全技术现状及发展趋势[J].公路与汽运,2014(1):1-4.
[6]李晨,宓超.基于飞思卡尔单片机MC9S12XS128的智能车设计[J].上海海事大学学报,2012,33(1):82-84.
Design of automobile active safety based on sensor
CHEN Li-jiao, XU Yong
(Design of Electronic Engineering and Automation,Guilin University of Electronic Technology,Guilin 541004,China)
Automotive active safety is research and by identifing risks of vehicle on roads,improve antomobile active safety property.This design uses autocontrol method,by researching automotive anti-collision detection and prevention,and lane departure warning,provide information support for automobile safety system,to realize active avoid collision risk,to minimize or avoid traffic accidents and to improve vehicle active safety.The designed automobile active safety collision avoidance system include a laser collision rangefinder,laser lane detection and an alarm warning system
automotive active safety; anti-collision; laser rangefinder; lane departure warning; automotive electronics
10.13873/J.1000—9787(2016)09—0106—04
2015—11—10
TN 249
A
1000—9787(2016)09—0106—04
陈立娇(1990-),女,浙江台州人,硕士研究生,主要研究方向为汽车电子等。
