基于FPGA的压电陀螺数字化检测电路设计*
2016-09-08李国斌吴校生
李国斌, 吴校生
(上海交通大学 电子信息与电气工程学院 微纳电子学系 微米纳米加工技术国家级重点实验室,上海市北斗导航与位置服务重点实验室,上海 200240)
基于FPGA的压电陀螺数字化检测电路设计*
李国斌, 吴校生
(上海交通大学 电子信息与电气工程学院 微纳电子学系 微米纳米加工技术国家级重点实验室,上海市北斗导航与位置服务重点实验室,上海 200240)
针对压电微固体模态陀螺的信号采集与算法要求,设计了基于现场可编程门阵列(FPGA)的兼具高精度高采样频率的陀螺数字检测系统。介绍了该系统的原理与实现方法。FPGA主控芯片选择XC6SLX25,ADC选择AD7960芯片(18 bit,5MSPS)。经试验验证,制作的样机可以同时采集三路输出信号,并实时处理传给上位机显示。测得陀螺共振频率稳定在349.89 kHz,上下波动范围8 Hz,参考端输出电压峰峰值的均方差为0.004 V。检测系统稳定,具有较高精度。研究的数字化检测电路能很好地应用于MEMS微陀螺检测信号的处理,提高MEMS微陀螺的稳定性和抗干扰性。
压电陀螺; 现场可编程门阵列; 数字检测; FIR滤波; 高精度; 高采样频率
0 引 言
陀螺是用于测量运载体姿态角或角速度的一种惯性传感器。随着微电子机械系统(MEMS)[1]技术的发展,MEMS微陀螺仪以其尺寸小、功耗低、抗干扰能力强等特点,在汽车导航、消费电子以及航空航天等领域拥有广阔的发展前景。
当前,MEMS微陀螺的检测电路大多采用模拟技术来实现,但是存在抗干扰能力弱,调试及控制系统复杂等不足。随着数字接口芯片(AD/DA)性能的提高,数字电路替代部分模拟电路是一种必然趋势。现有的数字电路检测技术,还主要是针对30 kHz以下的低频陀螺信号[2],本文研究的压电式微固体模态陀螺的参考振动频率340~400 kHz,该频率段微陀螺数字检测电路对采样频率和分辨率有更高的要求,对它的研究目前尚未见报道。
本文采用基于现场可编程门阵列(FPGA)的数字检测技术,完成硬件电路和检测逻辑设计,搭建测试平台,完成陀螺检测电路数字化测试。
1 压电型微固体模态陀螺工作原理
图1为压电微固体模态陀螺(piezoelectric micro-solid modal gyro,PMMG)的总体结构示意图,陀螺的核心部件是压电长方体振子。处于共振模态的陀螺,当沿着x轴方向上有角速度输入时,由于科氏效应,会在z方向产生科氏力Fc,从而在z方向产生相应的拉伸或压缩运动。y轴上的一对检测电极(如S1,S2)在参考振动模态下振幅相同,运动方向相反,科式效应下它们会受到相反的科氏力,导致这两个检测电极上的输出信号变化相反,且变化值与外界输入角速度成正比,据此通过外围电路对感应电荷或电压进行放大和量化,得到外界输入角速度的大小[3]。
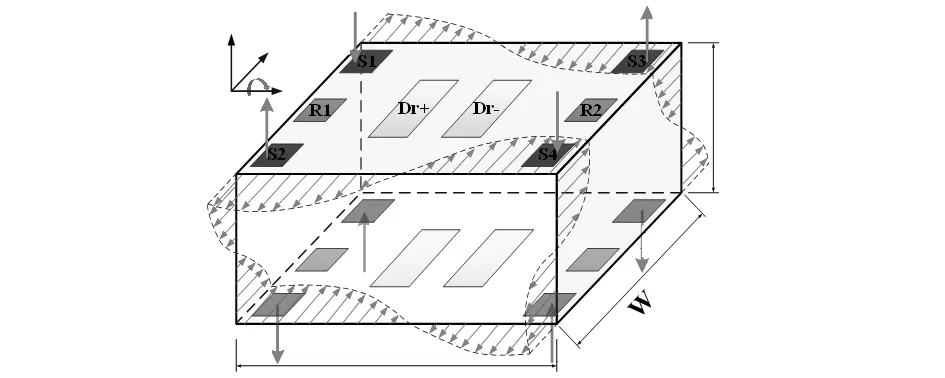
图1 压电微固体模态陀螺结构与工作原理
2 系统设计原理
2.1陀螺检测原理分析
陀螺的硬件电路设计中,采用了载波调制,因此需要对陀螺输出信号进行解调[4]。记陀螺没有角速度输入时的振动为本振,假设本振时S1,S2电极上的电荷量经电荷放大器后的电压Vsencor_s1和Vsencor_s2为Vcosωt。当外界有角速度输入时,传感电极S1和S2的电荷量发生相应变化,引起相应的电压值改变
Vsensor_S1=Vcos(ωt)+ΔVcos(ωt+φ)
(1)
Vsensor_S2=Vcos(ωt)-ΔVcos(ωt+φ)
(2)
这种变化经过相减(Vsensor_S1-Vsensor_S2)后,得到和角速度相关的信号为
Vrotate=2ΔVcos(ωt+φ)
(3)
此时若从参考电极R1引入一个同频同相的参考信号Rcos(ωt+φ)作为解调信号,即可将ΔV解调出来,即
Vrotate×Rcos(ωt+φ)=2ΔVcos(ωt+φ)×Rcos(ωt+φ)
=RΔV+RΔVcos(2ωt+2φ)
(4)
式中经解调后的信号经过低通滤波后,只留下低频量RΔV,此时,反映陀螺旋转的信号即被提取出来。此处R是参考信号的幅值。
2.2陀螺驱动与检测系统总体框图
如图2所示,陀螺闭环驱动电路(closed loop driving circuit,CLDC)主要包括自动增益控制(AGC)、锁相环(PLL)、电荷放大器和单端转差分放大电路[5]。
陀螺输出信号包括两路检测信号Sen1,Sen2和第三路参考信号Ref3。三路信号经AD采样转为数字信号后,送给FPGA进行差分、混频、低通滤波等处理,最终解调结果通过RS—232通信协议经串口发送给上位机实时显示。

图2 陀螺CLDC与检测系统框图
3 检测方法的具体实现
3.1AD采样
由于压电型微固态模态陀螺体积小,决定了反映角速度变化的压电体电荷变化量很小,输出信号非常微弱。另外,陀螺共振频率350 kHz左右,根据奈奎斯特采样定理,须以大于2倍的采样速率进行采样。因此,既要保证足够高的采样精度,又要保证足够大的采样频率。在本系统中,选用ADI推出的业界最快的18位、最高吞吐速率5MSPS模数转换器AD7960[6],满足对陀螺采样的要求。
3.2FPGA处理
根据检测原理,将采集到的两路检测信号S1,S2差分处理得到与角速度相关的信号。再将其与参考信号R进行混频,得到低通滤波前的信号。低通滤波采用128阶有限长单位脉冲响应(FIR)数字低通滤波器[7]。滤波后的结果即为与陀螺角速度线性相关的量。通过标定可以计算出陀螺旋转的角速度。
与上位机的通信设计采用RS—232标准的异步串行通信接口(UART)。将FPGA处理完的数据送至计算机,进行数据保存及实时绘制波形。
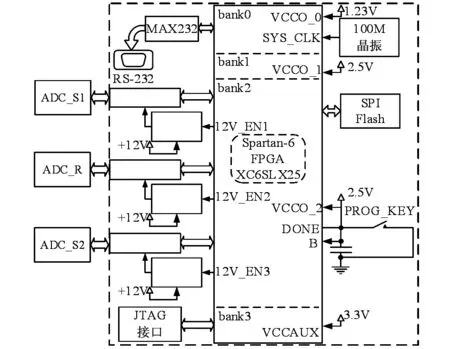
图3 检测系统硬件平台框图
4 检测系统硬件平台
检测系统以FPGA为核心。选用Xilinx公司spartan—6系列的XC6SLX25芯片[8]。本系统中选择带有SPI Flash的主动串行(Master Serial)配置模式[9]。检测系统硬件主要部分框图见图3。
5 实验结果与分析
5.1采样陀螺输出信号
图4为本振时陀螺参考端输出信号经移相后的采样结果。将参考端量化电压值转换为实际输出电压,得到参考端输出电压峰峰值1.496 V,峰峰值的波动均方差为0.004 V,由此可知,作为反映陀螺效应的系数,陀螺参考端幅值稳定性很好。
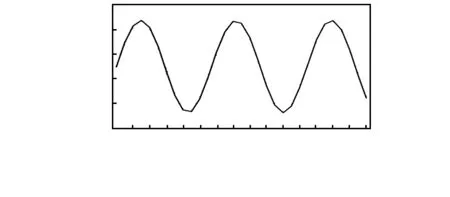
图4 参考信号AD采样结果
5.2128阶FIR滤波器滤波效果实测
从函数信号发生器输出正弦信号,进行扫频,频率范围0.1~100 kHz,时间200 s,对该信号进行采样与128阶FIR低通滤波,结果如图5所示。
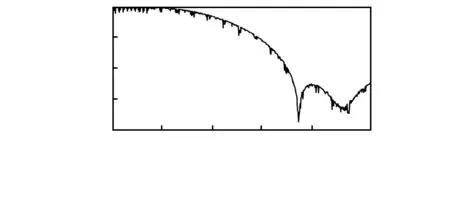
图5 0~100 kHz扫频低通滤波
可发现该FIR数字低通滤波器能很好满足本系统要求。闭环驱动下的系统频率的稳定性测试结果,如图6所示。
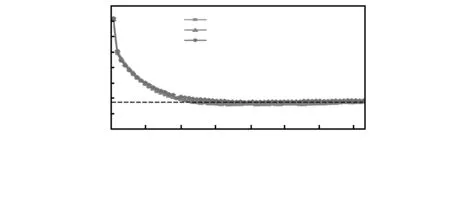
图6 闭环陀螺频率的稳定性
实验针对同一个陀螺样品,共测试3次,每次时间间隔为1 h。从图6中可以看出系统频率稳定在349.89 kHz,上下波动范围8 Hz。从图中还可以看出频率的稳定需要一个过程,原因是,电路中各个元器件的热稳定需要时间,其中包括了陀螺器件自身的振动稳定过程。由压电体陀螺的机械性能知,压电体本身是个储能的器件,起振的过程中与之进行的是电能到机械能的转换,这个过程中陀螺器件本身的频率点也不固定,会随着能量转换的变化而变化,直到能量储蓄完成。因此,这个稳定的过程需要一段时间。另外,陀螺没有采用真空封装,环境因素的影响也会增加其稳定时间。
6 结 论
针对压电式微固体模态陀螺工作频率高,检测信号微弱的特点,本文提出了一种基于FPGA的高精度(18位)高采样频率(4MSPS)数字检测系统,对陀螺信号进行了采集与数字信号处理,实时发送到上位机显示。测试结果表明:谐振时系统的各项性能稳定,硬件电路工作良好,检测系统可靠性高,AD采样和FPGA处理均正确,实验结果与理论分析相一致,这为下一步检测陀螺有外界角速度输入下的变化提供了很好的软硬件平台。
[1]刘昶.微机电系统基础 [M].2版.北京:机械工业出版社,2013:1-11.
[2]Guo Zhanshe,Cheng Fucheng,Li Boyu,et al.Research development of silicon MEMS gyroscopes:A review[J].Microsystem Technologies,2015,21:2053-2066.
[3]Wu X S,Chen W Y,Lu Y P,et al.Vibration analysis of a piezo-electric micromachined modal gyroscope(PMMG)[J].Micromech Microeng,2009,19(12):125008.
[4]He Yongsong,Wu Xiaosheng,Zheng Fu,et al.Closed-loop driving and detect circuit of piezoelectric solid-state micro gyroscope[J].Microsystem Technologies,2014,20:185-191.
[5]He Yongsong,Wu Xiaosheng.Study on driving technology of piezoelectric solid-state micro gyroscope[J].Applied Mechanics and Materials,2013,278-280:817-820.
[6]Analog Devices Inc.AD7960Datasheet[EB/OL].[2013—08—13].http:∥www.analog.com/media/en/technical-documentation/data-sheets/AD7960.pdf.
[7]程佩青.数字信号处理教程[M]. 3版.西安:西安电子科技大学出版社,2008:323-369.
[8]Xilinx Inc.Spartan—6 family overview[EB/OL].[2011—10—25].http:∥china.xilinx.com/support/documentation/data_sheets/ds160.pdf.
[9]Xilinx Inc.Spartan—6 FPGA configuration user Guide[EB/OL].[2014—10—29].http:∥china.xilinx.com/ support/ documentation/user_guides/ug380.pdf.
吴校生,通讯作者,E—mail:xswu@sjtu.edu.cn。
Design of digital detection circuit for piezoelectric gyroscope based on FPGA*
LI Guo-bin, WU Xiao-sheng
(National Key Laboratory of Science and Technology on Micro/Nano Fabrication Laboratory,Shanghai Key Laboratory of Navigation and Location-based Services,Department of Micro/Nano Electronics,School of Electronic Information and Electrical Engineering,Shanghai Jiao Tong University,Shanghai 200240, China )
To meet requirement of signal acquisition and algorithm of piezoelectric micro solid modal gyroscope,design a digital detection system with high precision and high sampling frequency based on FPGA.The principle and realization approach are presented.The main control chip of FPGA uses XC6SLX25 and ADC adopts AD7960 chip(18-bit,5MSPS).It is verifred by test that the prototype can acquire three-path output signals of the gyroscope at the same time, and sends the processed data to upper PC for displaying.The measured resonant frequencies is stabilize around 349.89kHz,fluctuating range is 8 Hz.The mean square error of reference voltage Vpp is 0.004 V.The detection system is stable and has high precision.This digital detection circuit can be well applied for MEMS microgyroscope signal processing and enhances the stability and anti-jamming of microgyroscope.
piezoelectric gyroscope; FPGA; digital detection; FIR filtering; high precision; high sampling rate
10.13873/J.1000—9787(2016)09—0092—03
2015—11—25
教育部支撑项目(625010117);上海市科委浦江人才计划资助项目(14PJD022)
TN 911
A
1000—9787(2016)09—0092—03
李国斌(1990-),男,安徽池人,硕士研究生,主要研究方向为MEMS传感器。
