航天运载器端面特征的新型图像特征识别方法
2016-09-08马玉坤
陈 浩, 马玉坤, 冯 辉
(北京宇航系统工程研究所,北京 100076)
航天运载器端面特征的新型图像特征识别方法
陈浩, 马玉坤, 冯辉
(北京宇航系统工程研究所,北京 100076)
基于航天运载器端面的固有特征,结合现有航天图像测量系统的硬件平台,提出一种端面图像特征提取与识别方法,获取视场内关键目标端面特征信息,对后续图像物理量参数优化解算起到指导性作用。以运载器端面椭圆特征为基础,利用Canny算子检测出图像中端面椭圆边缘特征,将特征边缘拆分为若干弧段,通过弧段拟合、弧段合并、椭圆提取等方法,实现端面特征的准确提取。仿真试验结果表明:该图像特征识别方法实时性好、精度高,可显著提高运载器图像测量能力。
目标识别; 端面特征; 参数提取; 物理量测量
0 引 言
目前图像测量技术已在我国航天运载器上得到广泛应用,主要用于关键飞行动作及设备状态的监测,取得良好的效果。随着全系统图像获取能力的不断提升以及高码率无线传输技术的支撑,在完成精确观测关键动作既定任务的同时,如能通过深入分析飞行图像数据,以获取诸多有价值的物理量测量信息,进一步完成图像中包含的关键目标特征信息的实时准确提取与识别,将对图像测量技术未来实现关键参数测量功能奠定理论与工程的基础[1]。
本文提出一种基于航天运载器端面特征的新型图像特征提取与识别方法,该方法以航天运载器视频影像中具有固定几何特征的端面为关键特征,通过建立端面特征与采样图像特征的匹配关系,充分发挥图像远距离、非接触测量等显著优势,对采集的图像序列进行实时处理,结合测量用摄像装置的标定后参数,获取运载器端面特征的实时结果。与此同时,基于图像测量仿真验证平台,验证新方法的测量原理的有效性和测量结果的准确性,为后续应用做充分准备[2,3]。
1 端面特征描述
本文以航天运载器端面圆或椭圆特征为依据,首先需构建特征圆或椭圆的几何描述。圆的方程可以表示为
(x-x0)2+(y-y0)2=R2
(1)
式中圆心用(x0,y0)表示,半径用R表示。参数表示形式为
(2)
椭圆的定义为平面内到两个固定点的距离之和为常数的点的轨迹的集合,这两个点为椭圆的焦点。椭圆的中心在原点且两个焦点都在x轴上时的标准方程为
(3)
参数表示形式为
(4)
从式(3)、式(4)中可知,一般椭圆方程包含5个独立的参数(x,y,α,β,θ),即椭圆的中心的坐标、椭圆长、短半轴长度以及椭圆长半轴与x轴正方向的夹角。因此,求解椭圆的一般方程需要5个不共线的点。此外,圆可以看成是一种特殊的椭圆,即长、短半轴长度相同的椭圆。
椭圆上任意两点的切线的交点与这两点中点的连线通过椭圆的中心。如图1所示,即点I与点M的连线通过椭圆中心点O。

图1 椭圆几何性质示意图
2 端面检测
2.1端面边缘检测算子
航天运载器图像中边缘的产生是由于实际目标在成像过程中的反射或透射不同所引起的,包括物体的边界线、物体表面不同的材质和颜色以及物体的阴影所引起的区域间的灰度差异。对于二维图像,Canny算子能够求解出边缘的梯度方向和大小两个信息,用多个不同方向的模板对图像进行卷积运算,取出最可能的方向。Canny算子采用高斯函数对图像作平滑处理,具有较强的去噪能力,能较好地检测出物体的边缘[4]。
由于在进行边缘检测时,Canny算子本质上也是根据某一点与其邻域中的点的灰度差异来进行判别,所以,在使用Canny算子对图像进行处理后,还要再利用该点周围点的边缘信息来增加或者减少该点被确定为边缘点的置信度。Canny提出了边缘点的判别依据:
1)该点处的梯度的强度大小大于沿着该点处的梯度方向上的相邻的两个点的梯度的强度,这里的梯度方向指的是正、反两个方向,以对图像中的边缘点进行准确定位并且严格控制边缘宽度为一个像素。
2)与该点沿着梯度方向相邻的两个点的梯度方向之差要小于45°。给出光滑性约束,排除由于随机因素所产生的影响。
3)以该点为中心的3×3邻域内的所有点的梯度强度的极大值小于某一阈值,保持边缘强度的相对一致性,去除噪声点所产生的伪边缘。
本方法首先对原始图像应用Canny算子进行边缘检测,在边缘检测得到的图像上进行椭圆检测。结合椭圆几何性质的椭圆检测方法先用最小二乘法将检测到的短线段合并成弧段,这样剔除掉了大多数与椭圆提取无关的边缘像素点,而后同样用最小二乘法将弧段合并成椭圆。
2.2端面椭圆检测
2.2.1弧段拟合
椭圆检测方法用短的线段来表示弧段。在检测出图像中的短的线段后,将线段按照图2所示分成I,II,III和IV等4组以减小后续椭圆检测时的计算量和提高计算的准确性。
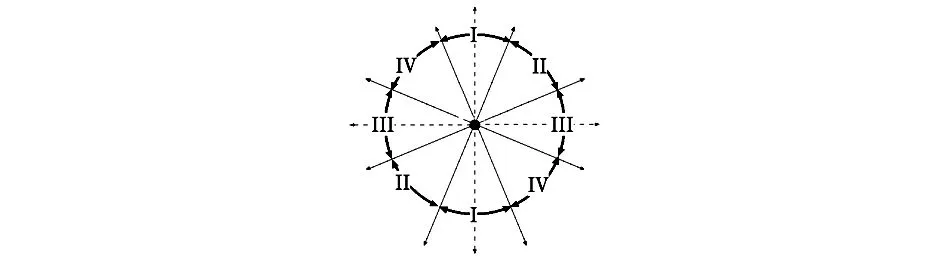
图2 弧段分类
本方法用点(xS,yS)标记直线段的起始点,用点(xF,yF)标记直线段的终止点,则直线段的斜率θline和中点(xM,yM)可以表示为
(5)
(6)
结合圆的几何性质的最小二乘的方法来拟合圆弧。传统的最小二乘拟合圆的方法对噪声比较敏感,即不在圆上的边缘点对拟合结果的影响较大。本方法的优势在于使用直线段来表示圆弧以及事先将圆分成了4组,然后根据直线的斜率和其所属的组别做进一步判断以提高拟合精度。


(7)
将检测到的已知短直线段信息,包括直线的起始点(xSi,ySi),终止点(xFi,yFi),中点(xMi,yMi)和直线段的斜率θline(i)。如果两条直线段垂直,那么它们的斜率之积为-1。因此,直线段的斜率还可以用上面求解得到的圆心坐标和直线段中点坐标来表示,即
(8)
只有当通过直线段的起始点和终点求得的直线斜率θline(i)与通过拟合得到的圆心和直线段的中点求得的直线斜率θcircle(i)之差小于一定阈值θerror,才认为拟合结果是正确的,即满足
|θcircle(i)-θline(i)|<θerror
(9)
如果拟合结果不满足式(10),则认为拟合结果是错误的,将这个结果去除。
2.2.2弧段合并
设定一阈值D,用阈值和一直线段的终点建立一窗口,并在窗口中搜索另一条直线段的起始点。如果一条直线段如图3所示的终止点和另一条直线段的起始点都在同一个窗口中,这两条直线段有可能合并成为一条直线段表示为
(10)
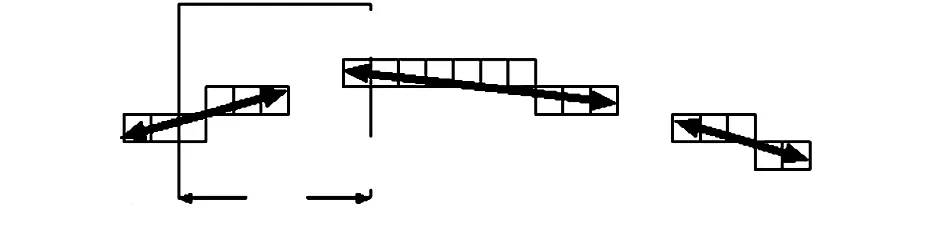
图3 直线搜索窗口
直线段合并后的结果如图4所示。
图4 直线段合并后的结果
2.2.3椭圆提取
将前面所划分的圆的4组进一步划分成8组,如图5所示。
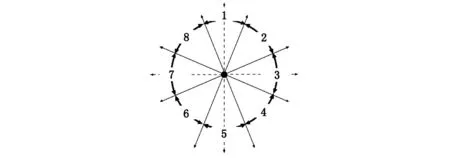
图5 圆分8组后示意图
本方法使用3段弧来拟合一个椭圆,这三段弧满足椭圆的几何性质,即每段弧的两个端点处的切线与两个端点的中点的连线经过同一个点。通过设定一个阈值,当3条直线两两相交后得到的3个交点之间的距离均小于这一阈值时,即认为它们经过同一个点。拟合时,求解出的参数应使弧段上的N个像素点满足
(11)
在求得椭圆参数后,用这组参数来求直线段的斜率,并与使用直线的起点和终点求得的直线斜率比较,即
(12)
且满足
|θellipse(i)-θline(i)|<θerror
(13)
剔除掉求解出的椭圆参数中无法满足式(13)的部分。对弧段进行筛选后进行了最小二乘拟合,拟合后又将不符合判断条件的解排除掉,即检测出了图像中的椭圆,也就是端面在图像中的位置[5]。
3 实验分析
3.1仿真验证平台
搭建图像采集与运动半实物仿真验证平台,其具体仿真功能如下:1)图像测量设备标校功能:首先使用标定软件对摄像装置参数进行标定;2)相对运动测量演示功能:测量时摄像装置所在的测量平台与被测目标所在的控制平台在不同方向上相对同时运动,获取实时图像数据,经解算得到被测目标的特征信息。
如图6所示,通过相应的辅助测量和控制平台、环境模拟等设备,评估图像特征提取方法的准确性[6]。
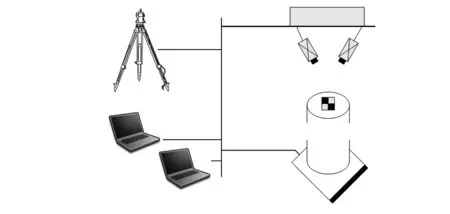
图6 半实物仿真平台示意图
3.2仿真实验
图7是椭圆检测方法对图像中的圆形端面进行识别的过程示意图,以小型发动机喷管模型为测量对象。从图8的图像提取与识别的结果来看,通过不同距离、方位拍摄被测目标时,均能准确提取出被测目标的椭圆特性参数,可以作为后续目标跟踪与姿态检测的依据。
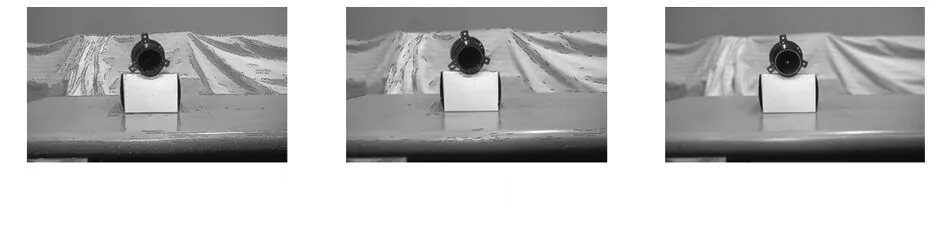
图7 图像识别过程示意图
4 结 论
基于航天运载器端面特征的新型图像特征识别方法,是以圆或椭圆特征为图像提取的关键特征,利用Canny算子有效的检测出图像中端面特征的边缘,将特征边缘拆分为若干弧段,通过弧段拟合、弧段合并、椭圆提取等方法,实现端面特征的准确提取。经过仿真实验验证:该方法测量实时性好、精度高,可以作为后续目标跟踪与姿态检测的依据。
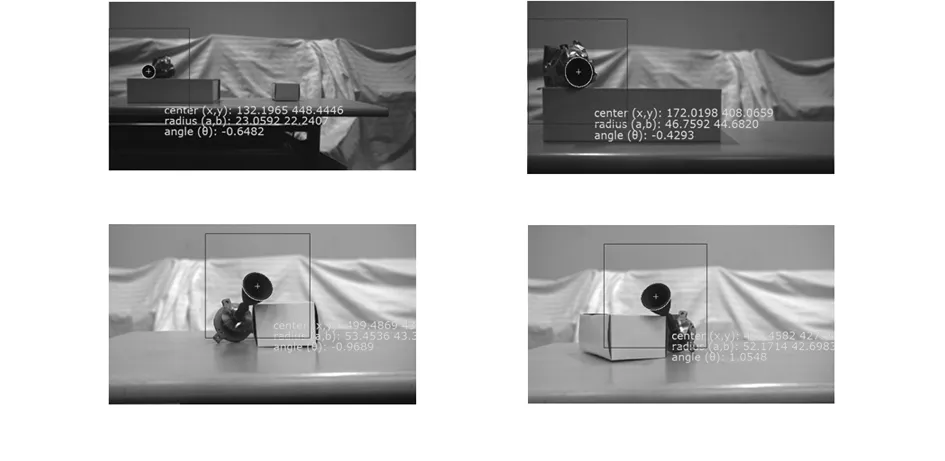
图8 目标识别结果
[1]邾继贵.视觉测量原理与方法[M].北京:机械工业出版社,2012:101-122.
[2]李彬,罗彪.机器视觉在物体位姿检测中的应用[J].传感器与微系统,2016,35(2):150-153.
[3]敬泽,薛方正,李祖枢.基于单目视觉的空间目标位置测量[J].传感器与微系统,2011,30(3):125-127.
[4]张恒.一种新的运动目标监测方法[J].光电工程,2005,35(9):11-16.
[5]施滢 ,高建坡 ,崔杰.分块多特征自适应融合的多目标视觉跟踪 [J].传感器与微系统,2015,34(9):128-131.
[6]尚洋.摄影测量技术在国防试验与航天器对接中的应用研究[J].实验力学,2005(20):91-94.
A new image feature recognition method based on space vehicle end surface feature
CHEN Hao, MA Yu-kun, FENG Hui
(Beijing Institute of Aerospace Systems Engineering,Beijing 100076,China)
Based on the inherent characteristics of space vehicle end surface,combined with the existing space image measurement system hardware platform,propose a method for end surface image feature extraction and recognition,to obtain the key objectives of surface feature information of the field and the follow-up image physical parameters optimization solution plays a guide role.On the basis of space vehicle elliptic edge feature,the ellipse edge feature is detected using the Canny operator,then the edge feature is split into several arcs.Using the method of arc fitting,arc merger and ellipse extraction,end sur face feature is extracted accurately.Simulation results show that the image feature recognition method has good real-time performance and high precision,and can significantly enhance image measurement ability of space vehicle.
target recognition; end surface feature; parameter extraction; physical quantity measurement
10.13873/J.1000—9787(2016)09—0046—03
2016—08—09
TP 752
A
1000—9787(2016)09—0046—03
陈浩(1986-),男,内蒙古通辽人,博士,工程师,研究方向为非电量测量、图像测量等领域。
