基于嵌入式μC/OS-II的光伏控制器的设计
2016-09-08廉小亲李康飞张晓力段振刚北京工商大学计算机与信息工程学院北京100048
沈 卓,廉小亲,李康飞,张晓力,段振刚(北京工商大学计算机与信息工程学院,北京100048)
基于嵌入式μC/OS-II的光伏控制器的设计
沈卓,廉小亲,李康飞,张晓力,段振刚
(北京工商大学计算机与信息工程学院,北京100048)
针对光伏发电系统中光伏电池板串并联带来的多峰值问题,基于自适应全局最大功率点追踪算法设计了最大功率追踪控制器。该设计以TMS320F28335 DSP芯片为基础,采用嵌入式μC/OS-II实时操作系统并加入了键盘、OLED显示器等人机交互界面。测试结果表明本控制器可以快速准确地实现全局最大功率追踪功能。
光伏发电;最大功率;DSP;操作系统
可再生能源的应用可从一定程度上缓解全球能源危机并极大地减少空气污染。近年来,太阳能凭借其无污染、无地域限制等卓越的优势从众多可再生能源中脱颖而出,光伏发电已成为继光热之后利用太阳能的新方向。然而当串并联使用的光伏电池板处于一个相对复杂的环境时,现有设备就很难保证后续电路的功能很好地实现。其主要原因就在于外界环境的改变会导致总的内部阻抗与后级负载阻抗不再匹配,进而造成光伏电池板最大功率点的改变,无法保证系统在全局最大功率点输出,也就更不可能实现最大限度利用太阳能的目标。
为了在现有条件下提高光伏电池板转换率,本文提出了基于TMS320F28335 DSP芯片(TI公司C2000系列)设计的光伏控制器,并使用自适应粒子群优化算法以实现全局最大功率追踪(GMPPT)[1]。另外,考虑到控制器工作时执行任务的复杂性,将嵌入μC/OS-II实时操作系统(RTOS)植入到控制器核心中,RTOS是一个可靠性很高的实时内核,能将CPU时间、中断、I/O和定时器等资源全部封装起来[2],在本设计中更加合理地完成CPU对于GMPPT算法执行、OLED显示、键盘输入等任务的时间分配。
1 光伏控制器工作原理
光伏阵列由多块光伏电池板串并联组成,由于单块电池板的参数存在差异以及光照不均匀等原因,光伏阵列的PV特性曲线会呈现为多个峰值点[3],如图1所示。根据光伏发电原理可知,当光伏发电系统的内部阻抗和外部负载阻抗匹配时,系统输出最大功率,因此光伏控制器的关键就在于通过控制一级直流转换电路来控制光伏阵列的输出电压和电流,使得输出电压和输出电流的比值即内部阻抗与负载阻抗保持一致。

图1 光伏阵列多峰值PV曲线
本系统光伏控制器采用TI C2000 DSP作为控制核心,其嵌入μC/OS-II实时操作系统结合了自适应粒子群算法,硬件部分涉及电压电流采集电路、EMI抑制电路、过流保护电路、DC-DC转换电路及IGBT驱动电路等。光伏发电系统的光伏电池板在多块串、并联情况下的发电模型如图2所示。
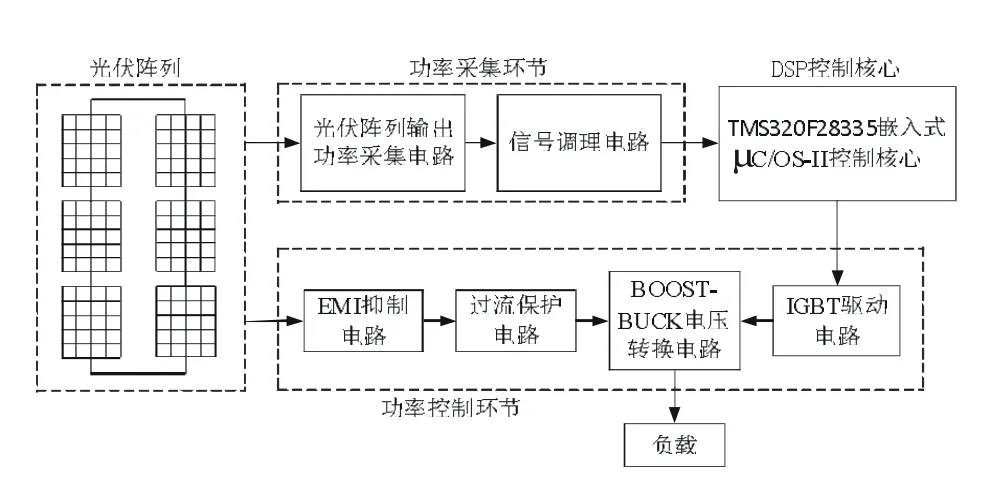
图2 光伏发电系统模型
2 控制器硬件设计
2.1DSP系统电路设计
DSP控制核心采用TMS320F28335,该芯片为一个高效率32位CPU,其时钟频率最高可达60 MHz,并集成了DSP运算指令,同时支持浮点型运算,此外片上还包含ADC、ePWM、定时器、外部中断等外设模块。其外围电路包括复位电路、晶振电路、电源部分以及键盘和OLED显示电路。主控DSP可通过SPI方式控制OLED的显示输出。
2.2功率采集电路设计
功率采集电路主要由霍尔电压传感器、霍尔电流传感器及信号处理电路三大部分组成。霍尔传感器采集到的电压、电流信号经过信号处理电路的滤波、放大和一级电压跟随后进入到DSP的AD采集口,继而在DSP内部计算当前光伏阵列的输出功率,为后续算法的执行和DC-DC电压的控制做好准备。
2.3功率控制电路设计
功率控制环节包括EMI抑制电路、过流保护电路、IGBT驱动电路和BOOST-BUCK电压转换电路,是整个控制器的重要组成部分,其基本功能即为完成光伏阵列内阻与负载阻抗的匹配。
2.3.1DC-DC转换电路设计
为了实现阻抗匹配,控制器需要加入直流电压变换环节,考虑到阻抗匹配过程有时需升高光伏阵列输出电压,有时又需降低光伏阵列输出电压以实现匹配,因此设计了升降压(BOOST-BUCK)直流变换电路。最终通过DSP的PWM输出控制该部分电路中IGBT的通断,即可以实现调压的目的。BOOST-BUCK电路如图3所示。
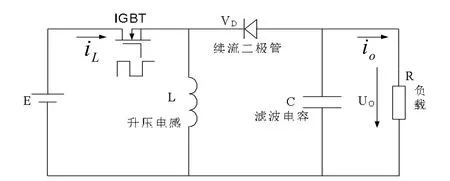
图3 BOOST-BUCK电路
在IGBT导通、二极管VD截止期间,输入电压U0向电感输入能量,负载端电压靠电容C放电维持输出电压,保证其值基本不变;在IGBT管截止且二极管导通期间,电感L会把前一阶段储存的能量释放出来,这部分能量被加在负载R上的同时还会对电容C进行充电。理想情况下,BOOST-BUCK电路的输出电压公式为:
电机中主要热源有铁耗,铜耗[5]。由于轴承摩擦损耗分析过程分析涉及到耦合场仿真问题,较为复杂,可暂不考虑,主要考虑铁耗,铜耗。工况均假定周围环境温度为70℃,考虑最严酷的散热工况,电机通过机壳表面与空气对流换热和辐射散热[6]。对电机稳态温度进行仿真。该电机为长时工作制,一次工作20000 s,用稳态温度场计算电机稳定后的工作温度,得到各部件最高温度,见表1。

式中:α为控制BOOST-BUCK电路中开关管PWM的占空比;E为光伏阵列的输出电压;U0为负载端电压即直流电压变换电路的输出电压,值得注意的是,U0的极性发生了由正到负的转变。
在不考虑分立元件的能量损耗,根据能量守恒定律,可推得:

由式(2)可看出只需通过调节PWM的占空比α即可实现光伏阵列内部阻抗的变换。当DSP调节占空比输出至光伏阵列等效阻抗与负载阻抗相等时,即实现了光伏最大功率点追踪。
2.3.2EMI抑制电路设计
前一节提及的直流变换电路中引入了由高频PWM控制的开关电路,其开关特性的工作方式将导致系统中电磁噪声的出现,因此设计了如图4所示的抑制EMI电路。其中共模电感的作用在于滤除线路中的共模电磁干扰,并且抑制系统本身不向外发出电磁干扰;输入级电容的设置是为滤除高频干扰信号,输出级电容是为滤除低频干扰信号。
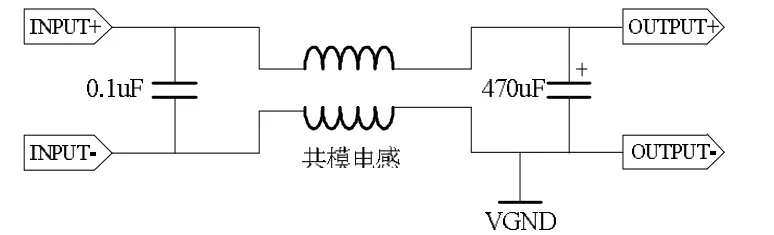
图4 EMI抑制电路
2.3.3过流保护电路设计
计算当前功率所需的电压电流会通过AD采集电路实时进入到DSP控制器内部,在其内部与设定好的阈值做对比,若超过设定阈值,DSP即刻通过I/O口控制继电保护装置断开通路,切断能量的输入从而防止对系统造成不可逆的损坏。过流保护电路如图5所示。
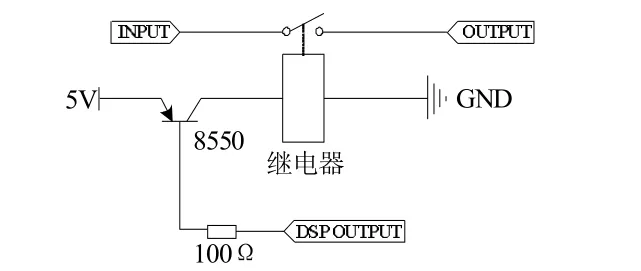
图5 过流过压保护电路
2.3.4IGBT驱动电路设计
IGBT的门极驱动电压为+15 V,远超过DSP的可输出范围,同时考虑到需防止强电部分可能对DSP系统工作带来的不良影响,因此加入了光耦隔离驱动电路,综合考虑IGBT的驱动电压和工作频率,这里选用型号为TLP350的光耦,IGBT驱动电路如图6所示。
3 控制器软件设计
控制器的软件部分包括系统软件和应用软件。其中使用到的系统软件即为μC/OS-II,除与处理器硬件相关部分外,μC/OS-II代码均由C语言编制完成,而与处理器硬件相关部分的代码则因考虑到系统的可移植性使用汇编语言完成编写[加入引用];应用软件则主要由AD采集程序、键盘扫描程序以及OLED显示程序组成。

图6 IGBT驱动电路
3.1系统软件设计
完成μC/OS-II在TMS320F28335上的移植需要修改3个与该芯片相关的文件,如表1所示。
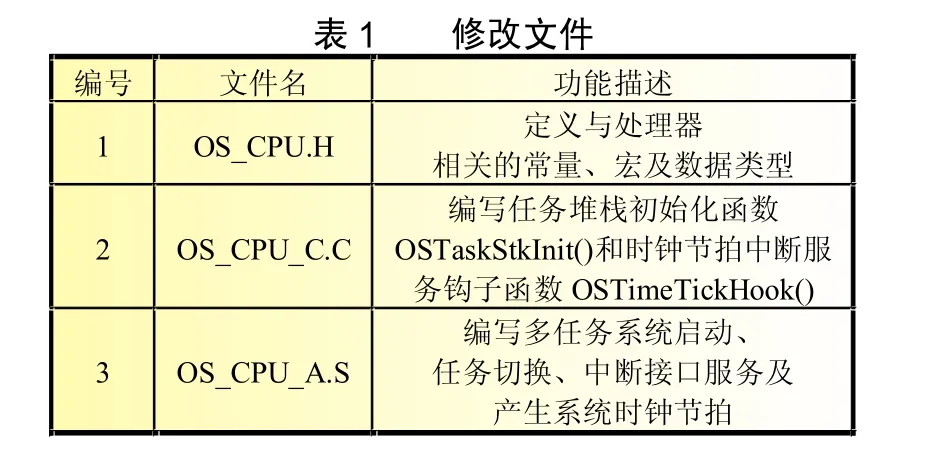
? ? ?? ? ? ? ? ? ? ? ? ? ? ? ? ?? ? ? 1 O S _ C P U . H ? ? ? ? ? ? ? ? ??????? ? ? ? ? ? ? ? ? ! " # $ ? O S Ta s k S tk I n i t() %&’()* + , ?-.$?O STime Ti c k Ho ok () 2 O S _ C P U _ C . C 3 O S _ C P U _ A . S ? ? / ? ? 0 1 2 3 ? ??45?*+67,? ? 8901&’()
除表1中所示3个文件之外,如果需额外裁剪或者修改μC/OS-II的系统服务以减少资源损耗,则可直接对文件OS_CFG.H进行修改和调整。
系统的时钟节拍通过DSP定时器1来产生,设置每10 ms产生一次定时器中断,即时钟节拍为100 Hz,当程序执行到内核的OSStart()函数时,即表示多任务系统开始启动,该过程执行的第一步就是实现定时器中断。
完成以上文件的修改即进行了μC/OS-II系统的移植。接下来只需要检验系统是否正常工作即可。
3.2应用软件设计
根据控制器需实现的GMPPT功能和人机交互功能,其应用软件应至少包括电压采集、电流采集、功率计算、算法执行、PWM输出、OLED显示和键盘扫描七大部分,为增强软件系统的可读性,每个软件部分被单独定义成一个任务事件,任务如表2所示。
系统启动后首先执行TaskInit(),该任务主要完成DSP系统的初始化,并创建各个任务。其中TaskInit()只执行一遍,其余的各个任务程序将在一个无限循环中反复执行。
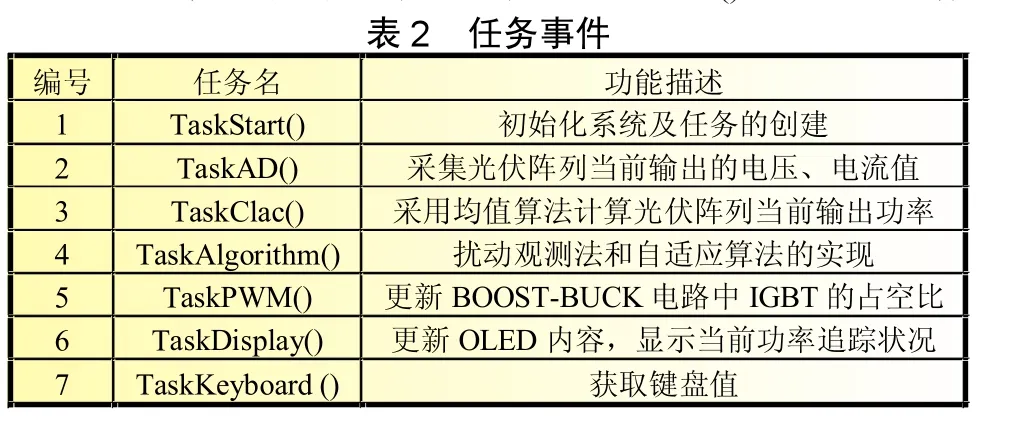
????????? ?? ??? ???? 1 T a s k S t a r t( ) ? ? ? ? ? ? ? ? ? ? ? 2 T a s k A D ( ) ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ! 3 T a sk C l a c ( ) ? " # ! $ % & $ ? ? ? ? ? ? ? ?? ’4 T a s k A lg o r it h m ( ) ( ) * + % , -. / $ % ? 0 1 5 T a s k P W M ( ) 2 3 B O O S T -B U C K ? 4 5 I G B T ? 6 7 8 6 T a s k D i s p la y ( ) 2 3 O L E D 9 : ; < = ? ?? ’> ? @ A 7 T a s k K e y b o a r d ( ) B C D E !
3.3算法软件设计
系统控制器采用自适应粒子群优化算法 (adaptive particle swarm optimization,APSO),算法开始时,粒子群会被随机初始化,之后不断进行迭代,直到粒子群追踪到合适的全局最优解。迭代时,粒子会通过追踪到的粒子个体最优解和群体最优解来更新自己。当所有粒子全部收敛到群体最优解上时迭代结束。APSO算法软件流程如图7所示。

图7 算法软件流程
APSO算法的目标函数为光伏阵列的功率函数,光伏阵列输出的功率值会随着BOOST-BUCK电路中开关管PWM波的占空比的变化而变化。在控制器设计上,粒子的位置对应着控制器输出PWM波的占空比,当所有粒子的位置与某个固定位置误差在5%之内时,表明粒子群已收敛,即找到了全局最优解[4]。
4 测试结果
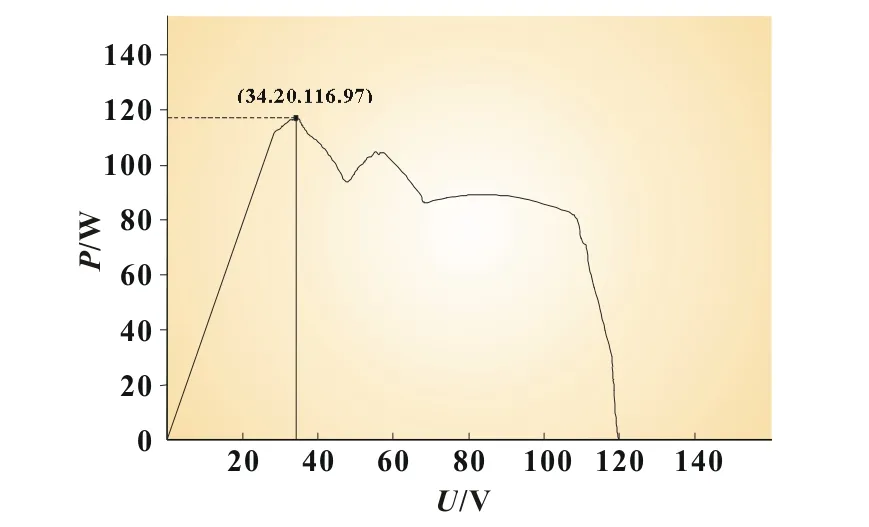
图8 光伏阵列P-V多峰曲线
为了测试控制器的追踪性能,通过预先设定的一组多峰曲线来模拟光伏阵列的P-V特性,多峰曲线如图8所示。随后,将数据导入安捷伦E4360模块化的太阳电池阵列仿真器,并通过仿真器自带的数据采集卡采集系统当前的输出电压和功率,如图9所示。由图9可知,控制器在1.50 s时开始工作,在2.78 s开始微调控制器的输出,最后将光伏阵列的输出维持在114.60 W。另外从图8中可以看出,光伏阵列全局最大功率点为116.97 W,由此可算得目前控制器的追踪精度已达到97.97%,且由图9可看出控制器算法执行时间仅为1.28 s,可基本满足系统对于实时性的要求。
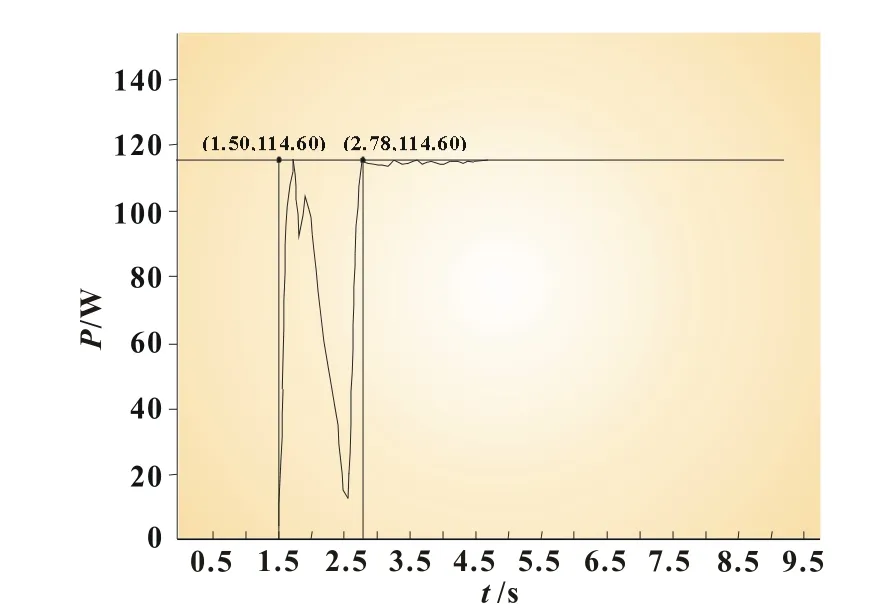
图9 功率响应
5 结束语
控制器采用嵌入式μC/OS-II实时操作系统,极大提升了DSP控制芯片的资源利用率及系统的整体稳定性;同时自适应粒子群优化算法的采用使得控制器可以快速、准确地实现在典型光伏阵列输出多峰值P-V特性下追踪全局最大功率点的目标,使得系统的实际应用价值得到进一步提升。
[1]廉小亲,张晓力,王嵩,等.光伏系统在部分遮挡条件下的GMPPT算法研究[J].电源技术,2012,36(10):1470-1473.
[2]刘幼林,姬劳.基于TMS320F2812+μC/OS-Ⅱ的断路器智能控制单元设计[J].电气应用,2006,25(1):29-32,37.
[3]刘邦银,段善旭,康勇,等.局部阴影条件下光伏模组特性的建模与分析[J].太阳能学报,2008,29(2):188-192.
[4]朱艳伟,石新春,但扬清,等.粒子群优化算法在光伏阵列多峰最大功率点跟踪中的应用[J].中国电机工程学报,2012,32(4):42-48.
Design of PV controller based on embedded μC/OS-II
SHEN Zhuo,LIAN Xiao-qin,LI Kang-fei,ZHANG Xiao-li,DUAN Zhen-gang
(College of Computer&Information Engineering,Beijing Technology and Business University,Beijing 100048,China)
For PV panels were series or parallel connected,the P-V characteristic curve of the system had multiple peak points.Adaptive global maximum power point tracking algorithm based on TMS320F28335 DSP was designed to solve this problem.It could be used to track the maximum power point effectively.Besides keyboard,OLED display and other interactive interface,embedded μC/OS-II real-time operating system were added aiming at improving the resource utilization of DSP and the stability of the whole system.Test results show that the system can work accurately and quickly when tracing the global maximum power point.
PV system;MPPT;DSP;OS
TM 914
A
1002-087 X(2016)01-0135-03
2015-06-14
北京市自然基金重点项目B类(KZ201410011014);北京市教委科技发展计划面上项目(KM201110011005)
沈卓(1990—),女,北京市人,硕士,主要研究方向为计算机测控技术。
廉小亲
