光伏阵列GMPPT控制器的设计及实现
2016-09-08廉小亲叶晓剑张晓力段振刚北京工商大学计算机与信息工程学院北京100048
廉小亲, 叶晓剑, 赵 瑾, 张晓力, 段振刚(北京工商大学计算机与信息工程学院,北京100048)
光伏阵列GMPPT控制器的设计及实现
廉小亲, 叶晓剑, 赵 瑾, 张晓力, 段振刚
(北京工商大学计算机与信息工程学院,北京100048)
在实际工程应用中存在光伏阵列局部遮阴或光照不均等现象,导致系统输出的P-V特性曲线出现多个峰值点。为实现光伏阵列最大输出功率点的实时有效追踪,基于自适应粒子群优化(APSO)算法设计出了一种光伏阵列全局最大功率点追踪(GMPPT)控制器。简要介绍了APSO算法在控制器中的应用方法,阐述了控制器的总体设计方案及硬件电路设计,并给出了测试结果。测试结果表明:该控制器能够有效、快速、准确地追踪到光伏发电系统的全局最大功率点,具有一定的工程应用价值。
光伏发电系统;局部遮阴;GMPPT控制器;DSP
随着全球能源危机和大气污染问题日益突出,可再生能源逐步得到应用。在可再生能源中,太阳能以其分布广泛、无污染、安全可靠等优势成为各国重视的焦点。目前,光伏发电是人类利用太阳能的主要方式。在温度和日照强度一定的情况下,光伏发电系统P-V特性曲线呈单峰性有唯一的最大功率点,但实际工程应用中,不可避免地存在光伏阵列局部遮阴或光照不均等现象,此时系统的输出P-V特性曲线会出现多个峰值点[1]。为提高太阳能的能量转换效率,必须对光伏阵列的输出功率进行实时有效的追踪。本文结合自适应粒子群优化(APSO)算法设计出了一款基于DSP的光伏阵列全局最大功率点追踪(GMPPT)控制器,并对其进行了性能测试。
1 控制器的总体设计方案
控制器作为连接光伏阵列和负载的中间环节,必须能准确获得光伏阵列的输出功率、运行控制算法以及产生控制信号。所以,本GMPPT控制器系统主要由功率采集环节、控制核心和功率控制环节三个部分组成。设计时,采用DSP作为控制
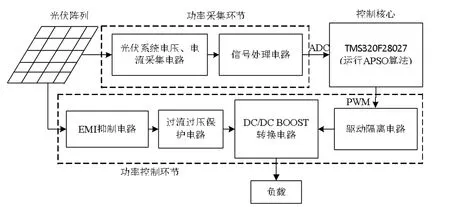
图1 控制器总体结构框图
光伏系统工作时,首先通过电压、电流采集模块实时采集光伏阵列的输出电压和电流,并利用信号处理模块将采集到的模拟信号转换到能够被DSP的AD模块识别的范围内。然后由控制核心根据光伏阵列输出电压和电流的采集值计算出相应的输出功率,同时运行APSO算法控制DSP产生PWM驱动信号,进而调节BOOST转换电路中功率开关管的导通时间,实现负载阻抗和光伏电池内阻等值匹配,使光伏阵列输出的功率最大。
2 控制算法
本控制器采用适合多峰寻优的APSO算法作为控制算法,该算法的基本思想是基于粒子的群体迭代,能克服PSO算法固定参数的不足,根据群体自适应地调整惯性因子。APSO基本数学表示[2-3]略。
(1)实际应用中APSO算法表示及基本原理
在APSO算法实际应用中,光伏阵列的功率函数定义为APSO算法的目标函数。因为每次改变控制脉冲波(PWM)的占空比之后,光伏阵列输出的电压和电流都会随之改变,所以控制器输出PWM的占空比定义为粒子的位置,占空比的变化量定义为粒子的速度。应用时,APSO算法的表达式如下:设搜索空间为d维,总粒子数m,第i个粒子在k次迭代后的位置、速度分别为Dutyik、Δdutyik,其中:i=1,…,m。设Pik为第i个粒子在迭代k次后的最优位置,Pgk为所有粒子在迭代k次后的全局最优位置。
第i个粒子的速度和位置按如下公式变化:

式中:ω为惯性因子;c1、c2为加速度系数;r1、r2为两个相互独立的U(0,1)随机函数。
每个粒子的位置极值点:

全局最优功率点:

式中:f(·)为目标函数。
粒子群初始位置和速度随机产生,然后按式(1)~式(4)进行迭代,直至找到最优解为止。APSO算法流程见图2。
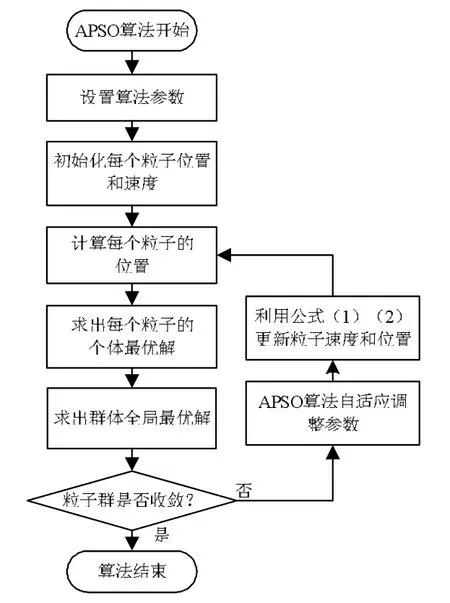
图2 APSO算法流程
APSO算法在控制器上开始运行时,会先对粒子位置进行初始化。考虑到追踪的时效性,初始化时粒子的个数不能选取太多。初始化结束以后,粒子群将进行第一次迭代,在迭代过程中,不断更新粒子的极值和全局最大值。迭代完成后,系统会判断所有粒子是否已经收敛。倘若尚未收敛,控制器将对粒子参数进行调整,并更新粒子位置,为下一次迭代做准备。如果已经收敛,说明系统此刻有最大输出功率,算法执行完毕。
(2)实际应用中APSO算法参数调整思路
APSO算法移植到GMPPT控制器上时,参数调整策略需要根据GMPPT控制器的实际运行环境进行修改。算法中参数w是影响APSO算法收敛效果的关键因素,应根据算法的进化状态进行自适应调整,w应随着迭代次数的增加而逐渐减小。这样就可以使占空比由大范围逐步向小范围变化,同时粒子的位置也逐渐向最优位置方向靠近。
w的迭代公式调整为:

式中:k为迭代次数;α为衰减常数,其值需要通过实验测试进行调整,在本系统中将α设置为10。
(3)APSO算法调用的条件
由于发电系统中,光照强度会不断发生变化,为保证系统输出功率一直最大,还需定时(本设计采用5 s的定时间隔)检测光伏系统的输出特性是否发生改变。在定时器中断函数中,对此刻最优功率点对应的占空比进行加大一个步长和减小一个步长处理(本设计中步长取5%),并分别计算出处理后的占空比对应的输出功率,然后通过计算调整后的两点与当前全局最优点之间的斜率,来判断光伏输出特性是否改变。如果改变,则APSO算法会被DSP控制器调用;如果未变,控制器将控制脉冲波维持在最优占空比的位置。系统按照这种模式持续工作下去,保证光伏阵列输出的功率一直是全局最大功率,这样就可以实现光伏阵列最大功率点的实时追踪。
3 系统的硬件设计
3.1DSP控制核心
DSP控制核心采用TI公司的DSP芯片TMS320F28027,其自身不仅集成了DSP指令集、支持浮点运算,同时还含有丰富的片上外设(包括ADC、ePWM、定时器等),这些特点使其不仅具有DSP的数字信号处理能力,还具有MCU的控制能力,能够满足系统设计需要。
3.2功率采集环节
功率采集环节主要由霍尔传感器电路和信号处理电路组成。其中霍尔传感器电路完成光伏系统输出电压、电流的采集;信号处理电路负责对采集到的电压、电流进行滤波、放大以及电压跟随处理,使其转换到可以被DSP的AD模块识别的范围内,以便后期DSP对输出功率进行分析计算。
3.3功率控制环节
作为追踪器的重要组成部分,GMPPT控制器的功率控制环节主要由DC-DC转换电路、驱动隔离电路、电磁干扰(EMI)抑制电路和过流过压保护电路组成。
3.3.1DC-DC转换电路
DC-DC转换电路的作用是通过控制电子器件的通断,将直流电压断续地作用到负载上,以改变占空比的方式改变输出电压值,把某一幅值的直流电压改变为所需要的幅值[4]。本控制系统选取BOOST电路作为系统的控制环节,其原理如图3所示。
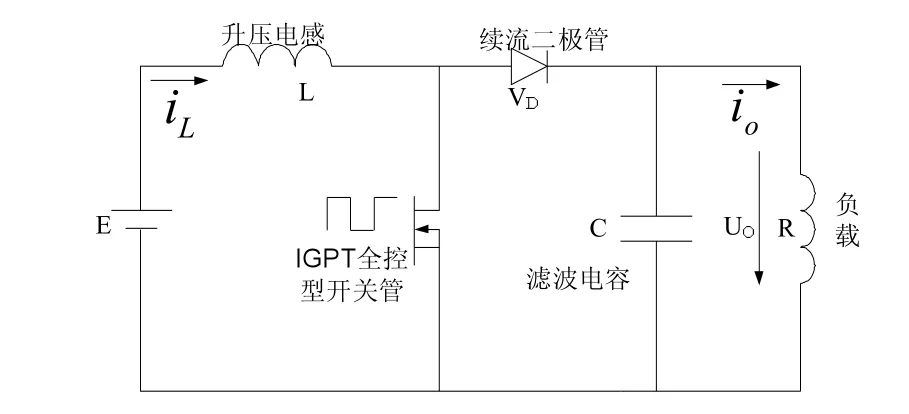
图3 BOOST电路原理
当BOOST电路导通时,输入电源即光伏电池给升压电感充电,此时滤波电容对负载进行放电;当BOOST电路断开时,光伏电池与升压电感共同给滤波电容充电。理想情况下,BOOST电路的升压原理如式(6)所示:

式中:α为控制BOOST电路中开关管的PWM的占空比;U0为负载端电压;E为光伏电池板电源电压。
根据能量守恒定理,可推导出式(7):

式中:i0为负载端电流;iL为电源端电流。
由式(7)可以看出BOOST电路通过调节IGBT开关管的导通与关断的时间即占空比,就可以将一种等效阻抗变换成另一种等效阻抗,使得与光伏电池阻抗相匹配,实现最大功率跟踪,这就是光伏最大功率点追踪的理论依据。
为避免BOOST电路产生噪声以及过大的能量损耗,设计时着重考虑了DC-DC BOOST电路的开关频率和转换效率。选取型号为FGA15N120AND的IGBT作为DC-DC BOOST电路的开关管,该IGBT的CE端电压可高达1 200 V,最大导通电压为±20 V,最大允许电流为15 A。同时选取快速二极管作为DC-DC BOOST电路中的二极管,快速二极管的型号为FFP15S60S,最大通过电流为15 A,其反向承受电压为600 V,导通时间小于35 ns,完全能够满足设计需要。DC-DC BOOST电路如图4所示。

图4 DC-DC BOOST电路
3.3.2EMI抑制电路
在GMMPT控制电路中,控制系统容易向外界输出EMI,影响系统工作。为此,需要在DC-DC BOOST电路的输入端添加由共模电感和电容组成的滤波电路。共模电容主要用于抑制高速信号线产生的电磁波向外辐射。共模电感是一个双向滤波器,一方面用于滤除信号线上共模电磁干扰;另一方面还可以抑制本身不向外发出电磁干扰,避免影响同一电磁环境下其他电子设备的正常工作。应用时只要将共模电感的两端分别连接一个由滤波电容组成的低通滤波器,就可将线路上的共模电磁干扰信号控制在很低的电平上。这部分电路如图5所示。
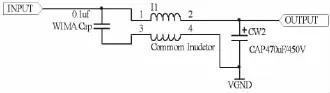
图5 抑制电磁干扰(EMI)电路
3.3.3过流过压保护电路
为保护整个控制系统的安全,防止应用过程中出现过流或者过压情况对系统造成损害,设计时在系统的输入级加入了继电保护装置,并根据实际应用情况设置系统的输入电压和电流的阈值分别为120 V和10 A。工作时,直接利用采集环节作为阈值检测电路,通过霍尔电压电流传感器实时检测系统的输入电压和电流。一旦系统的输入电压或者电流大于对应的阈值,DSP控制核心就会切断电路,进而保护整个控制系统。过流过压保护电路如图6所示。

图6 过流过压保护电路
3.3.4驱动隔离电路
由于DSP控制核心的I/O输出信号较小,无法正常驱动DC-DC BOOST电路中的IGBT开关管,而且在控制电路中,过大的电压、电流以及高频谐波也会对控制芯片产生严重的干扰,使测量精度严重下降,所以在本系统中,光耦不仅要起到光电隔离的作用还要能够驱动IGBT开关管。经对比分析,选取的光耦型号为FOD3120,该光耦不仅具有高强度的噪声免疫功能、IGBT栅极驱动能力,还具有快速的开关速度。这样,仅通过一片FOD3120光耦芯片就可以实现驱动IGBT开关管和电路隔离的功能,大大地简化了电路设计,驱动隔离电路见图7。
4 实验结果与分析

图7 光耦隔离电路
为检验所设计的控制器性能,本文对整个光伏阵列GMPPT控制系统进行了测试。测试时,利用安捷伦E4360A太阳能仿真电源模拟光伏阵列输出。图8和图9是根据该仿真电源的AD采集卡采集到的数据绘制出的P-t图和V-t图。
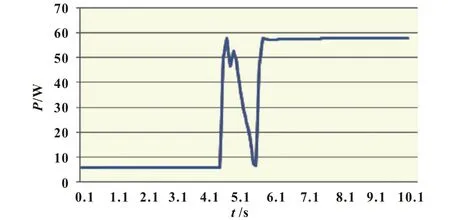
图8 APSO算法的P-t响应时间
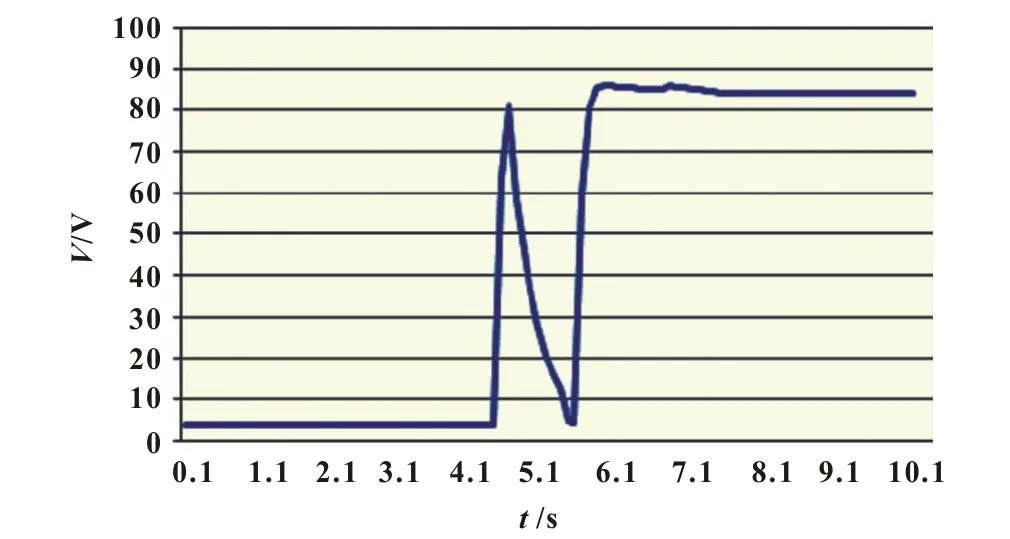
图9 APSO算法的V-t响应时间
从图8的P-t曲线可以看出,粒子群在4.3 s位置开始初始化,此时随着粒子位置的不断调整,仿真电源的输出功率呈现很大的波动,直到5.6 s时粒子群初始化结束;然后开始迭代,在8.0 s时迭代结束,此时粒子群收敛。整个APSO算法从启动到收敛经过了3次迭代,仅耗时3.7 s。
为了更清楚地观察整个追踪过程中粒子群的位置变化,再利用安捷伦MSO6012A混合信号数字示波器检测输入DC-DC BOOST电路的控制脉冲波的占空比和频率,同时利用安捷伦34410A数字万用表测试负载两端的电流、电压值。测量结果见表1,表1中的功率值和电压值分别与图8、图9中的功率值和电压值相对应。

?????????????????????? ???? ??/V ??/A ??/W ???/% ????/W 0 ( ? ? ? ? ) 3 .7 7 9 2 1 . 4 9 1 8 5 . 6 3 7 8 9 1 . 0 ? 1 8 5 .5 3 8 1 0 . 6 7 0 9 5 7 .3 8 7 5 1 0 . 2 5 1 . 7 4 9 7 2 8 4 .6 3 5 1 0 . 6 8 1 0 5 7 .6 3 6 5 1 0 . 6 0 .2 4 9 0 3 8 3 .7 2 7 9 0 . 6 9 0 5 5 7 .8 1 4 1 1 1 . 0 0 .1 7 8 0 ?
从表1中可以看出利用该控制器对光伏发电系统进行最大功率点追踪后,追踪到的最大功率点为57.814 1 W,而此时安捷伦E4360A仿真电源给出的实际最大功率点功率为58.183 W,精度高达99.3%。从上面的测试结果可以看出本文所设计的光伏GMPPT控制器完全能够在多峰情况下快速、精确地追踪到最大功率点,使系统稳定工作在输出功率最大点处,满足设计要求。
5 结论
针对传统的最大功率点追踪算法无法在有遮挡情况下对光伏阵列的最大输出功率进行有效的追踪,本文在APSO算法的基础上研制出了以DSP TMS320F28027芯片为控制核心的光伏GMPPT控制器。测试结果表明该设计能够在多峰情况下快速、精确地对最大功率点进行追踪,满足并且实现了设计要求。但由于实验室条件有限,一些强电的测试实验还没有完成,如何在大功率条件下实现光伏控制系统的优化控制今后还将进一步研究。
[1]廉小亲,张晓力,王嵩,等.光伏系统在部分遮挡条件下的GMPPT算法研究[J].电源技术,2012,36(10):1470-1473.
[2]黄婉平.自适应粒子群优化算法及其应用研究[D].杭州:浙江大学,2006.
[3]韩江洪,李正荣,魏振春.一种自适应粒子群优化算法及其仿真研究[J].系统仿真学报,2006,18(10):2969-2971.
[4]乔增平,李宏,崔立国,等.基于极值搜索的光伏电池最大功率点跟踪仿真[J].计算机测量与控制,2009,17(2):402-404.
Design and implementation of photovoltaic array GMPPT controller
LIAN Xiao-qin,YE Xiao-jian,ZHAO Jin,ZHANG Xiao-li,DUAN Zhen-gang
(College of Computer&Information Engineering,Beijing Technology and Business University,Beijing 100048,China)
Photovoltaic array partial shade and uneven illumination phenomenon were existed in the practical engineering application,which caused the P-V characteristic output curve of the system output multiple peaks.In order to track photovoltaic array maximum power output point effectively,a photovoltaic array global maximum power point tracking(GMPPT)controller was designed based on APSO algorithm.A brief description of the application of APSO algorithm was given in the controller,and the design of overall system and hardware implementation were given as well.Test results show that the tracker can work accurately and quickly to trace the global maximum power point under complex condition and has certain engineering application value.
photovoltaic power generation system;partially shaded;GMPPT controller;DSP
TM 615
A
1002-087 X(2016)01-0131-04
2015-06-12
北京市教委科技创新平台(PXM2011-014213-113551);北京市教委科技发展计划面上项目(KM201110011005)
廉小亲(1967—),女,河南省人,博士,教授,主要研究方向为计算机测控技术。核心,APSO算法作为控制算法,电压、电流采集模块和信号处理模块作为功率采集环节,驱动隔离电路、DC-DC BOOST升压电路等作为功率控制环节。控制器的总体结构框图如图1所示。
