基于改进电导增量法的光伏阵列MPPT
2016-09-08杨秋霞王海臣姜培培燕山大学电气工程学院河北秦皇岛066004
杨秋霞, 王海臣,张 ,姜培培(燕山大学电气工程学院,河北秦皇岛066004)
基于改进电导增量法的光伏阵列MPPT
以太阳能发电最大功率跟踪单元为研究对象,采用改进电导增量法,通过理论分析和Matlab模型仿真的方法,对光伏阵列的最大功率跟踪(MPPT)性能进行分析与实验验证。研究结果表明,改进的电导增量法具有良好的控制精度,加入恒压启动过程后,使新算法兼具快速的跟踪效果。
太阳能发电;MPPT算法;电导增量法;变步长;恒压启动
新能源的研究与发展已经成为了当今世界最重要的课题之一,太阳能作为一种清洁、高效和永不衰竭的新能源越来越受到人们的关注。太阳能具有波动性和随机性,为了高效利用太阳能,研究人员提出了最大功率跟踪(MPPT)技术。国内外学者做了大量关于MPPT算法的研究,较经典的有固定电压法(CVT)、扰动观察法(P&O)、电导增量法(INC)、模糊逻辑控制、神经元网络控制等。各种控制方法都有各自的优缺点,本文在上述研究基础上提出了变步长电导增量法,并加入恒压启动,对算法进行改进,仿真结果表明新算法能同时实现动态响应和减小稳态震荡两者的最优化,提高MPPT精度和速度。
1 光伏电池模型
1.1光伏电池数学模型
光伏电池属于半导体光电器件,光辐射到光伏电池直接产生电能。依据电子学理论,得到光伏电池的等效电路如图1所示。
其电流表达式为:


图1 光伏电池等效电路
式中:Iph为光生电流;I0为光电池反向饱和电流;n为二极管因子;k为波尔兹曼常数;q为电子电量;Rs为光电池串联电阻;Rsh为光电池并联电阻。
文献[1]给出了面向工程实际的光伏电池简化数学模型:
由此可见,本模型只需输入电池技术参数Isc、Uoc、Im、Um,就可以得出C1和C2。
当光照强度S(W/m2)及电池温度θ(℃)变化,太阳电池的输出功率会发生变化。为了方便计算,电池温度由大气温度和光照拟合:

下面一组公式得到任意时刻光伏电池的V-I特性:

式中:θ为任意时刻光伏电池的温度;Δθ为任意时刻与标准环境下光伏电池的温度差;S为任意时刻的光照;ΔS为任意时刻与标准环境下光照差;Isc'为任意时刻短路电流;Voc'为任意时刻开路电压;Im'为任意时刻输出最大功率对应的最大输出电流;Vm'为任意时刻输出最大功率对应的最大输出电压。
Isc'、Voc'、Im'、Vm'代入式(1)、式(2)、式(3)就可以得到任意环境条件下光伏电池的V-I特性。
1.2光伏电池阵列仿真模型
根据1.1节中的光伏电池数学模型,在Matlab的Simulink中搭建太阳电池仿真模型。模块内部封装了参数Isc'、Voc'、Im'、Vm'。可以通过点击光伏电池的封装模块,如图2,设置上述参数,通过更改不同的温度和光强来模拟不同的V-I特性。

图2 光伏电池封装模型
1.3仿真结果
运用上述模型对STP0950S-36型号光伏电池进行仿真,其主要参数见表1。

??????/W 94 ????????????????????????? ????????? ????/A 4.8 ?????????/V 21.7 ?????????/A 4.5 ????/V 24.2 ????????/(mA?? ????????/(V??
在标准参考条件下(1 000 W/m2,25℃)光伏电池仿真结果如图3所示。图3符合1.1节中建立的物理模型,从而验证了仿真模型的准确性。
图4为不同光照强度及温度下的P-U曲线。
通过图4仿真结果可知,光伏电池输出特性具有严重非线性,而且受光照强度和温度影响明显。温度和光照一定时,光伏电池存在一个特定的最大功率点,且温度一定时,最大功率点与光强成正比;光强一定时,最大功率点和温度成反比。
为了使光伏电池尽可能工作在最大功率点,需要在光伏发电系统中施加一个MPPT控制策略,来实现负载与光伏电池间的最佳匹配。0
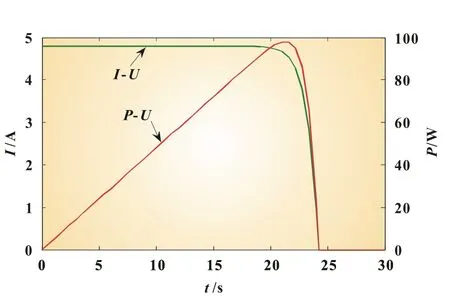
图3 标准条件下光伏电池I-U、P-U曲线

图4 不同条件下光伏电池P-U曲线
2 最大功率跟踪
2.1电导增量法
电导增量法是目前常用的最大功率跟踪控制方法之一,它是通过比较光伏电池瞬时电导和电导的变化量来实现最大功率跟踪。由光伏电池P-U曲线可见,最大功率点处于曲线顶点。由此得[2]:

并有以下关系:

实际使用时,需要给定一个合适的阈值E,并设定dP/dU=±E时系统工作于最大功率点,当电导增量变化小于这个阈值时,无需改变工作点;当电导增量变化大于这个阈值时,则要相应变化工作点。所以选择合适的步长和阈值非常关键。
2.2变步长电导增量法
电导和电导增量之和与最大功率点之间具有潜在的关系。工作点距最大功率点较远时,两者之和保持不变;在最大功率点附近时,两者之和迅速趋于0;在最大功率点处,则等于0。故可用两者之和来控制步长,从而得到变步长电导增量法流程,如图5所示。图5中,N为调整步长的比例因子,MPPT算法步长即为占空比变化量ΔD。这样,在最大功率点附近,工作点移动很小,实际工作点趋于和最大功率点重合。

图5 变步长电导增量法流程
2.3Matlab仿真
要保证功率损失不超过光伏电池板可用最大输出功率的2%,则max(ΔD)=ΔD(2%)=ΔDmax。ΔDmin的值,根据实验设备中电压电流的采样精度选取。
为保证最大功率点处的震荡最小,同时兼具良好的跟踪速度,选择
根据图5所示的流程搭建变步长电导增量法控制模块,如图6所示。

图6 变步长电导增量法模块
在图7所示光伏发电系统中验证该控制算法,光伏电池功率160 W,采用Buck变换器,温度为25℃,光照在0.05 s时由800 W/m2变为1 000 W/m2。
最大功率跟踪曲线如图8所示。由图8可见,温度为25℃,光照强度为800 W/m2条件下,系统输出功率在0.018 s时稳定在133.5 W;当光照强度在0.05 s由800 W/m2变到1 000 W/m2时,系统在0.06 s再次达到稳定状态。由此可见,变步长电导增量法能够使系统输出功率稳定在当前条件下的最大功率值,具有良好的跟踪性能。但由于开始时刻步长较大,导致功率出现阶梯变化,因而在此算法的基础上增加恒压启动算法加以改进。

图7 MPPT系统仿真

图8 变步长电导增量法最大功率跟踪曲线
2.4变步长电导增量法的改进
一般来说,光伏电池板最大功率点电压为开路电压的78%左右。设电压Uset=0.8Uoc,使变换器的占空比线性增加到接近最大功率点,得到平滑的跟踪曲线。恒压启动算法即设定参考电压Uset=0.8Uoc,当采样电压值大于参考电压时,线性增加占空比D;当采样电压值小于参考电压时,采用电导增量法。
根据图5所示的流程搭建具有恒压启动功能的变步长电导增量法Matlab仿真模型,如图9所示。

图9 具有恒压启动的变步长电导增量法仿真模型
相同条件下对改进的变步长电导增量法进行仿真,结果如图10所示。

图10 具有恒压启动的变步长电导增量法MPPT曲线
由图10可见,利用固定电压法启动可以消除P-U曲线启动时候的阶梯性变化,使仿真曲线变得平滑,而且加快跟踪速度,保证系统跟踪到当前条件下的最大功率值。
将图10和图8对比可知,具有恒压启动的变步长电导增量法兼具良好的启动特性和稳态跟踪效果。
3 结论
本文建立了光伏电池的物理模型,并搭建Matlab仿真模型,通过仿真波形的分析验证其准确性。用Buck电路搭建基于变步长电导增量法MPPT光伏发电系统的仿真模型。该方法在外界光照突变的情况下能够实现良好的跟踪效果,但由于起始时刻步长较大,使功率曲线出现阶梯变化,为此加入恒压启动算法,仿真图表明,新算法兼具良好的启动特性和稳定性。
[1]苏建辉,余世杰,赵为.硅电池工程用数学模型[J].太阳能学报,2001,22(4):399-410.
[2]高冲赫,陈继开,孙雪,等.基于改进的变步长电导增量法的MPPT方法研究[J].电源技术,2013(10):1342-1344.
Research of MPPT technology based on variable step length conductance increment method
YANG Qiu-xia,WANG Hai-chen,ZHANG Ying,JIANG Pei-pei
(Institute of Electrical Engineering,Yanshan University,Qinhuangdao Hebei 066004,China)
Using solar maximum power tracking unit as the research object,the MATLAB simulation model was run by variable step length conductance increment method.The MPPT performance could be analyzed and verified according to the simulation waveform.The results show that:Variable step length conductance increment method has good control accuracy,the new algorithm has fast tracking performance starting by adding a constant voltage method.
solar power generation;MPPT algorithm;incremental conductance method;variable step size;constant pressure start
TM 914
A
1002-087 X(2016)01-0128-03
2015-06-15
秦皇岛市科学技术研究与发展计划(201001A086)
杨秋霞(1972—),女,山东省人,博士,副教授,主要研究方向为逆变器并网控制、光电检测技术、电力系统控制。
王海臣
