无线紫外光信标引导直升机降落驾驶辅助系统
2016-09-08唐冬冬程路敏赵太飞
黄 鑫,唐冬冬,程路敏,赵太飞,2
(1.西安理工大学自动化与信息工程学院,陕西 西安 710048)2.光纤传感与通信教育部重点实验室(电子科技大学),四川 成都 610054)
无线紫外光信标引导直升机降落驾驶辅助系统
黄 鑫1,唐冬冬1,程路敏1,赵太飞1,2
(1.西安理工大学自动化与信息工程学院,陕西 西安 710048)2.光纤传感与通信教育部重点实验室(电子科技大学),四川 成都610054)
为了解决野外行动、城市突发事件、地震灾害、水灾火灾等紧急情况下直升机应急降落的安全性问题,设计了一种基于无线紫外光信标引导的直升机降落驾驶辅助系统,实现了全天候、宽视场、抗干扰能力强的实时图像传输,为直升机降落提供了精准的环境信息。同时对直升机起降中水平通信和垂直通信进行了仿真分析,并通过实验平台进行了实地测试,验证了本设计具有较高的实用性与创新型,提高了直升机在复杂环境下紧急降落的安全性与稳定性。
紫外光通信;LOS链路;直升机助降;信标引导
随着4000米以下低空的开放和越来越多的紧急事件或自然灾害的发生,直升机在相应的救援行动中充分了发挥其灵活机动的特点,体现了越来越高的重要性,然而直升机的起降受降落场地限制较大,现有的直升机助降系统一般采用可见光标和旗语引导[1],这种方式安全性能低且实际效率低。因此,无线紫外光信标引导直升机降落驾驶辅助系统的设计具有重要意义。
无线紫外光信标引导直升机降落驾驶辅助系统是利用紫外光散射特性[2-3]进行复杂环境下全天候通信的一种直升机应急安全保障手段,能满足各种复杂场合下救援直升机应急辅助起降的需求。本设计针对复杂地形、天气和电磁环境中陆地、楼顶、船载等情景下直升机起降存在的安全问题,研究基于无线紫外光通信的直升机辅助起降技术[4]来减少或消除安全隐患。同时,无线紫外光通信还可作为一种军事保密通信手段广泛应用于公安、武警、交通运输、海陆空三军,对国防现代化建设具有特殊的使用价值和实际意义。
目前,国内外对无线紫外光通信技术的研究还主要集中于通信理论研究,而对紫外光通信在直升机应急辅助起降中的引导技术研究较少。利用无线紫外光助降技术可以实现复杂环境下高可靠性的直升机全天候起降,受天气影响小,节约人力资源,提高直升机起降的安全性。因此本设计具有广阔的发展前景、应用空间和重要的研究价值。
紫外光波段[5]通常划分为 315~400nm(Ultraviolet Light A,UVA)、280~315nm(Ultraviolet Light B,UVB)和 10~280nm (Ultraviolet Light C,UVC)。在UVC波段中波长为200~280nm的太阳辐射被大气平流程的臭氧分子强烈吸收,使得其在近地太阳光谱中几乎没有该紫外光波段,所以称其日盲区[6]。利用日盲紫外光进行通信有以下优势:抗干扰能力强、全天候非视距通信、便携式、宽视场、保密通信能力强以及适用于特殊的通信场合[7]。因此本设计选择日盲段紫外光源进行通信。
1无线紫外光引导的直升机助降系统
1.1助降系统整体结构
本系统采用日盲波段紫外光LED[8-9]作为地面信标发送端,发送经过编码之后的地面图像信息,通过机载接收端接收紫外光信号,建立空地无线紫外光通信,并引导驾驶员操纵直升机逐渐抵达降落点上空,在帮助驾驶员获取地面数据的同时以便驾驶员准确降落,系统原理框图如图1所示。
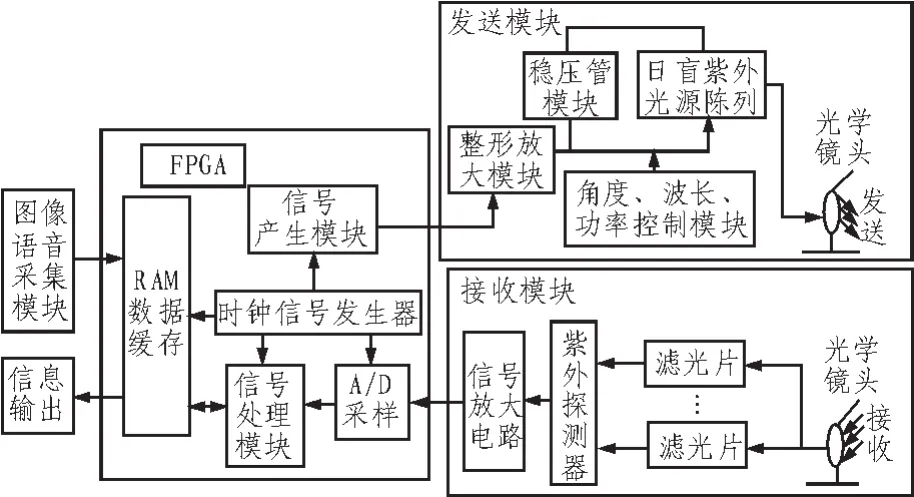
图1 系统结构示意图
1.2系统硬件组成
1.2.1地面紫外光信标发送模块
采用UTOP2260型号的紫外光LED组成的光源阵列作为地面信标发射源,其峰值波长为265nm,处于日盲波段(200nm-280nm),符合系统设计要求。
地面紫外光LED阵列的主要作用是对经过编码之后的图像数据信息对空进行广播,等待机载接收端接收。同时,可以对紫外光源的波长,频率和角度进行特定的调节来传输信息。其典型功率位0.3mW,传播过程中以日盲紫外光为载波,实现了近距离、高速率、抗干扰的数据传输以及效果良好的图像通信。
1.2.2图像数据处理模块
采用无线摄像头对降落场地环境进行图像信息的采集,再交由FPGA进行编码,形成适合紫外光通信的数据帧,最后交给地面发送模块对空进行广播。
根据无线紫外光传输特性以及自由空间光通信信道[10]的特点,对数据链路层数据帧格式进行分析设计,为了提高紫外光数据传输过程中的帧同步速率,采用经过插帧处理的封帧格式[11],在数据区前加上固定的 2字节帧同步头 0xFF 0xD8,以0xFF 0xD9作为帧尾,中间依次有长度位、数据段和校验位。对长度位、数据段和校验位的数据进行插值处理,即如果数据中(除了帧头和帧尾)出现0xFF,则对其后面插入一个0x00,这样处理过的视频流数据中0xFF后面最少接一个0x00。帧中0xFF 0xD8和0xFF 0xD9只可能作为帧头和帧尾出现,由帧头和帧尾实现帧同步。在接收端只需判断收到的数据字符,除去标志位外,将接收到的视频流数据中0xFF后面的0x00剔除即可还原视频流数据。只有当数据长度对比正确以及检验也无误时才能说明数据无误,并将收到的数据进行译码显示图片。这种方法处理过的帧,一般不会出现假同步,比较容易实现帧同步。帧格式封装如图2所示。

图2 插帧格式的帧封装
1.2.3机载紫外光接收端
采用R7154型光电倍增管,对地面信标发送的特殊帧格式的紫外光信号进行接收,接收到的紫外光信号经过滤光片过滤后,成为可信的信息。
接收端通过FPGA对经过过滤后的数据帧进行解码译码,通过图像处理算法将数据帧中的图像信息提取出来,并送至机载显示屏进行显示,辅助直升机驾驶员进行降落。
机载提示灯阵列主要用来指示飞机与降落点的对准程度,此部分采用AD转换模块对光电倍增管的输出电流信号进行电压采样,并通过微控制器FPGA编写电压-距离转换算法,控制提示灯来指示当前降落点的情况。
1.3助降系统引导实施过程
无线紫外光信标引导直升机降落具体过程包括以下4个阶段:
信标布置阶段:地面人员选择合适的降落场,安置紫外光信标,通过扫描阵列的方式多角度发送降落地标信息。同时检测各个通信模块运行状态,等待直升机到来;
直升机搜索信号阶段:地面信标发射端发送自身位置信号并将采集到的图像信息对空进行广播,机载设备打开,开始检测紫外光信号;
直升机对准机载接收端阶段:直升机驾驶员根据机载提示屏的提示及提示灯的亮灭情况,并且通过获得的地面图像,驾驶飞机逐渐靠近、对准信标上空;
直升机下降阶段:当直升机靠近信标降落点时,提示灯阵列点亮的个数越来越多,亮灯越多,则证明飞机与降落点对准程度越高;当降落提示灯提示达到最佳对准时,直升机开始降落,在降落的过程中微调飞机姿态,保持飞机与降落点对准,完成降落过程。
2 直升机助降中紫外光单次散射链路
根据发射光束发散角、接收视场角、发送接收角度不同所形成的重叠散射区域特性[12],紫外光非直视通信可以分为(a)(b)(c)三类通信方式如图3所示,图3(a)为NLOS[13](a)类通信方式,即垂直发送-垂直接收;图3(b)为NLOS(b)类通信方式,即定向发送-垂直接收;图3(c)为NLOS(c)类通信方式,即定向发送-定向接收。

图3 紫外光非视距通信方式
图4为非视距通信系统信道模型[15-16],发送端为Tx,接收端为Rx,发散角为φ1,发送仰角为θ1,视场角为φ2,接收仰角为θ2,有效散射体为V,通信距离为r,发送端到有效散射的距离和有效散射体到接收端的距离分别为r1和r2。Tx在φ1和θ1范围内向空间发射光信号,光信号在有效散射体内散射后,Rx以φ2和θ2进行光信号接收。
无线紫外光信标引导直升机降落驾驶辅助系统的简化通信模型如图5所示,将发射端T放置在地面的降落场,设其为坐标原点,接收端R放置在位于高度h的直升机上,r为收发端之间的水平距离差,则二者的直线通信距离[17]为r′=
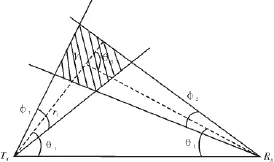
图4 非视距通信系统信道模型
3 系统软件设计与流程
3.1底层软件
底层软件设计主要完成任务如图6所示,主要实现对图像数据的采集、封装、压缩编码、解码以及数据纠错。

图5 直升机降落驾驶辅助系统简化通信模型
3.2上层软件设计
上层软件平台主要提供友好的人机交互界面,完成系统性能测试以及实验数据分析。以图像传输为例,图7(a)为发送端程序运行流程图,图7(b)为接收端程序运行流程图,硬件接收端在接收到数据,进行解调译码后通过串口把收到的数据发送给计算机对接收到的数据进行处理之后会把图像显示出来。
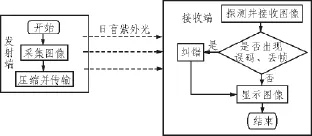
图6 底层软件框图
4 系统测试结果及分析
直视状态下直升机助降通信性能的分析
本文仿真过程中,部分系统参数[18]取值如表1所示。
利用无线紫外光直升机助降演示平台,在1~10 m的通信距离下,我们测试了直视状态下整个紫外光通信链路的实际路径损耗值以及信号发送端与接收端各自的功率情况,经过多次重复实验取平均值后得到如下表2所示的各项数据。

图7 上层软件流程图

表1 部分系统仿真参数
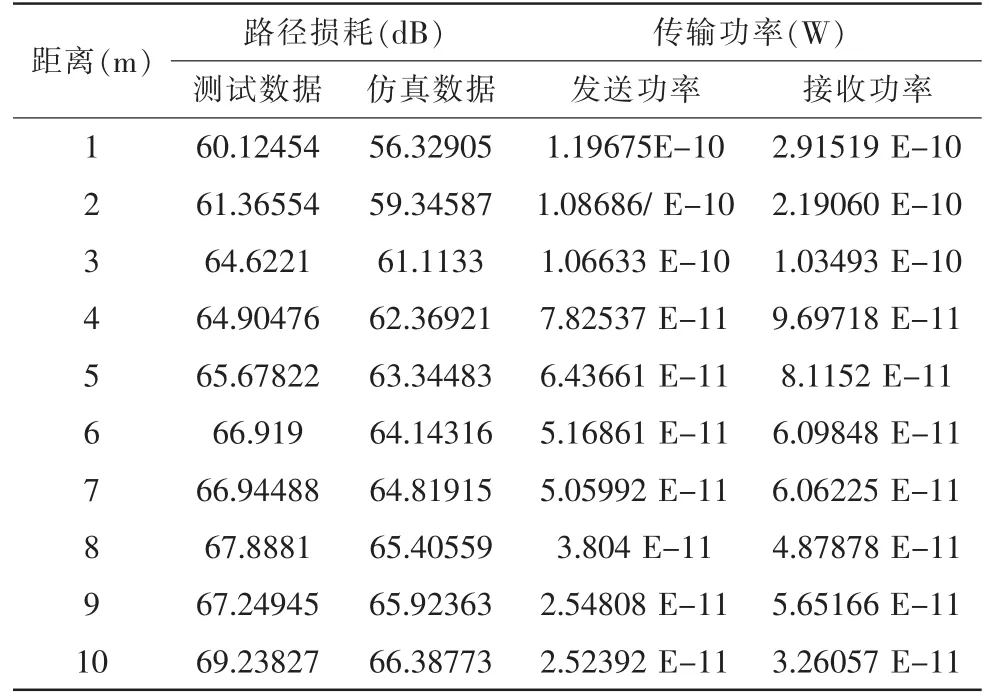
表2 不同距离下的路径损耗值及收发功率数据对比
由表2可以看出,实测路径损耗与理论值相差在2-3个dB以内,1m处相差较大是由于发射端紫外LED以及接收端PMT的发散光束角和接收视场角的局限造成的。表中数据表明收发端功率分别在光电倍增管和紫外光LED的典型功率附近,设备利用率较高。因此,在直升机引导助降场合下,利用相关原理对紫外光链路进行推算,并将结果利用在实际系统设计与应用中,是符合理论预期的。
5 结 论
本系统由紫外光信标引导系统及空地图像传输系统两部分组成,无线紫外光信标引导系统解决了飞行员进行定点降落的困难,帮助飞行员更加精确、安全、快速的完成降落;无线紫外光图像传输系统实现了实时的图像传输,提供了一种不同于传统无线电方式的新型通信技术。综上所述,无线紫外光信标引导直升机降落驾驶辅助系统的技术指标、功能实现、应用前景等方面基本满足了设计要求,体现了创新性及实用性。
[1]赵太飞,吴鹏飞,宋鹏.无线紫外光直升机辅助起降通信技术研究[J].激光杂志,2014,35(10):9-13.
[2]Z.Xu,B.M.Sadler.Ultraviolet communications:potentialand state-of-the-art[J].IEEE Communications Magazine,2008,46(5):67-73.
[3]YAO Li,LI Ji-ye.Ultraviolet Short-range Communication ThroughAtmosphere[J].JournalofAtmosphericand Environmental Optics,2006,1(2):136-137.
[4]陈晗.直升机集群紫外光通信系统[J].科学技术与工程,2007,22(7):5898-5900.
[5]吴忠良,梁菁,任杰,等.紫外光通信系统现状及发展趋势分析[J].电子科技,2011,24(8):119-123.
[6]Yen J.Intentionally short-range communications exploratory development plan.National Technical Information Service,1992.
[7]ZUO Yong,WU Jian,XIAO Hou-fei,at el.Non-Line-of-Sight UltravioletCommunicationPerformanceinAtmospheric Turbulence[J].China Communications,2013,10(11):52-57.
[8]李霁野,邱柯妮,王云帆.自由大气紫外光通信中几类光源的比较和研究[J].光通信技术,2006,9:56-57.
[9]余晓东,赵太飞,王小瑞,等.基于单LED的无线紫外光通信系统设计与实现[J].电子设计工程,2011,11(19):23-28.
[10]王惠琴,柯熙政.MIMO大气激光通信及其关键技术[J].激光杂志,2008,16(3):52-54.
[11]青山良,李晓毅,肖沙里,等.紫外光语音调制信号的接收和解调[J].仪器仪表学报,2006,27(6):2032-2035.
[12]罗易雪,汤心溢,刘鹏.紫外通信平台搭建技术[J].光学通信技术,2014.
[13]何华,柯熙政,赵太飞.基于高度的紫外光NLOS单次散射链路模型的研究[J].激光技术,2011,35(4):495-498.
[14]Shaw G.A,Siegel A.M,Mode J.Recent Progress in Shortrange Ultraviolet Communication[C].Unattended Ground Sensor Technologies and Applications VII,Proceedings of SPIE,2005,5796:214-225.
[15]ZHAO Tai-fei,ZHANG Ai-li,JIN-dan.Researchonthe Inter-link Interference Model in Wireless Ultraviolet NLOS Communication[J].ACTA OPTICA SINICA,2013,33(7):0706023-1-0706023-6.
[16]Mohamed A.El-Shimy,Steve Hranilovic.Binary-Input Non-Line-of-Sight Solar-Blind UV Channels:Modeling,Capacity and Coding[J].J.OPT.COMMUN.NETW.,2012,4(12):1008-1017.
[17]唐义,倪国强,蓝天,等.“日盲”紫外光通信系统传输距离的仿真计算[J].光学技术,2007,33(1):27-30.
[18]王平,高俊,天培根.紫外光语音通信系统参数补偿技术及Matlab仿真[J].海军工程大学学报,2008,20(5):56-59.
Helicopter landed driver assistance systems based on wireless ultraviolet light beacon
HUANG Xin1,TANG Dong-dong1,CHENG Lu-min1,ZHAO Tai-fei1,2
(1.Faculty of Automation and Information Engineering,Xi'an University of Technology,Xi'an 710048,China;2.Key Lab of Optical Fiber Sensing&Communications(UESTC),Ministry of Education,Chengdu 610054,China)
In order to solve the security problem of emergency landing in the field,the emergency landing of helicopter is designed based on the guidance of wireless ultraviolet beacon.The real-time image transmission is realized,which can provide accurate information for the helicopter landing.At the same time,the simulation analysis of horizontal and vertical communication is carried out,and the field test is carried out through the experimental platform.The design has high practicability and innovation,and the security and stability of helicopter landing in complex environment are improved.
ultraviolet communication;LOS link;helicopter assisted landing;beacon guiding
TN929.12
A
1674-6236(2016)09-0129-04
2015-11-24稿件编号:201511225
国家自然科学基金委员会-中国民航局民航联合研究基金资助(U1433110);陕西省科技计划工业公关项目(2014K05-18);陕西省教育厅产业化培育项目(2013JC09);全国大学生创新创业基金支持
黄 鑫(1995—),男,陕西渭南人。研究方向:嵌入式通信。
