高速公路勘测中车载激光点云高精度校正可行性分析
2016-09-08魏国忠吴学超
魏国忠,侯 飞,张 衡,吴学超
(山东省国土测绘院,山东 济南 250013)
高速公路勘测中车载激光点云高精度校正可行性分析
魏国忠,侯飞,张衡,吴学超
(山东省国土测绘院,山东 济南 250013)
目前车载移动测量系统在公路勘测方面的用途日益显著。本文阐述了车载激光点云数据的获取原理,对车载移动测量系统的误差进行了估计,并分析了一定时间和距离内误差传播的规律,论证了利用靶标控制点对车载激光点云数据进行高精度校正的可行性,最后通过高速公路改扩建项目实例对可行性进行了验证。
车载激光点云;靶标控制点;高精度校正;高速公路改扩建
随着国内车载移动测量设备和技术的日益成熟,车载移动测量系统被尝试应用于公安、交通、市政等各个领域,特别是在交通领域,如高速公路改扩建,车载移动测量具有成本低、机动灵活的优势[1-2]。车载激光点云数据为高速公路勘测提供了详尽、连续的参考数据,信息丰富,成果多用。但同时,高成本和高风险的高速公路改扩建项目对车载激光点云的精度有着十分苛刻的要求,对车载移动测量系统等高精尖设备在公路勘测中的应用提出巨大挑战[3]。
本文从这一现实出发,通过阐述车载激光点云数据的获取原理,并对车载移动测量系统的误差进行分析,从而总结出一定距离和时间段内误差传播规律,论证了利用靶标控制点对车载激光点云数据进行高精度校正的可行性,最后通过银川高速公路改扩建项目实例对校正的可行性进行了验证,为车载移动测量系统在高速公路勘测中的应用提供了理论支持和经验借鉴。
一、坐标系及其变换
移动测量系统在计算空间点云坐标的过程中,主要涉及4个坐标系之间的转换,即激光扫描仪坐标系、惯导平台参考坐标系、当地水平坐标系、WGS-84大地坐标系[4]。影响测量系统精度的误差源主要包含激光测距误差、系统安装角度误差、姿态角度误差、GNSS定位误差和杆臂向量误差等[5]。
1. 扫描点在激光扫描参考坐标系中的坐标
激光扫描坐标系是以激光发射参考点为原点,Z轴垂直于安置底座向上,X轴与Z轴垂直并构成激光扫描平面,Y轴按照右手法则垂直于扫描平面,如图1所示,激光扫描角θ按照Z轴正向顺时针旋转得到。
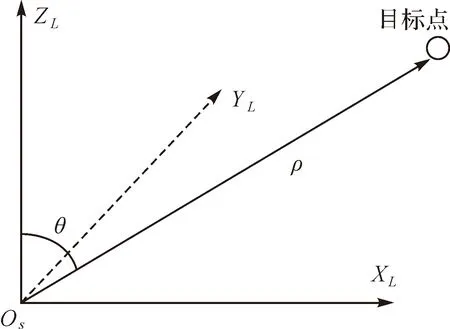
图1 激光扫描仪坐标系
假设激光参考点与被测目标点之间准确距离为ρ,激光距离误差为Δρ,则考虑激光扫描误差时在激光扫描仪坐标系中的被测目标点的坐标(XL,YL,ZL)应满足
(1)
2. 激光扫描参考坐标系至惯性平台参考坐标系
IMU传感器几何中心为惯性参考系坐标原点,以移动载体前进方向为Y轴正向,垂直向上为Z轴正向,X轴满足右手法则;安置激光扫描仪与IMU系统时,会导致激光扫描参考坐标系与惯导平台参考坐标系之间存在坐标中心的偏移及3个坐标轴的旋转;假定坐标原点偏移的杆臂向量3个方向分别为lX、lY和lZ,三轴旋转角度为横滚方向ω、俯仰方向φ和航向方向κ,如果进一步考虑两坐标系之间的安置角度误差Δω、Δφ和Δκ及杆臂向量误差ΔlX、ΔlY和ΔlZ,则激光测量点在惯性平台参考坐标系中的坐标(XI,YI,ZI)满足
(2)
式中,RM为安置角旋转矩阵;E为单位矩阵;ΔRM为安置误差角旋转矩阵,当误差角满足小角时,满足
(3)
3. 惯性平台参考坐标系至当地水平参考坐标系
当地水平坐标系又称站心坐标系,假定IMU测定的3个姿态角为横滚角r、俯仰角p和航向角y,姿态角误差分别为横滚方向Δr、俯仰方向Δp和航向方向Δy。则考虑姿态角误差时激光测量点转换至当地水平参考系的坐标(XH,YH,ZH)满足
(4)
式中,RZ为姿态角旋转矩阵;E为单位矩阵;ΔRZ为姿态误差角旋转矩阵,当误差角满足小角时,满足
(5)
4. 当地水平参考坐标系至WGS-84坐标系
当地水平参考系可以通过旋转平移转换到地心地固的WGS-84系中,假定GNSS的相位中心为(XG,YG,ZG),在WGS-84下的经纬度分别为L和B,GNSS定位误差为(ΔXG,ΔYG,ΔZG),则考虑到定位误差时,当地水平坐标系激光扫描点在WGS-84坐标系下的空间直角坐标(XE,YE,ZE)满足
(6)
式中,RE为坐标旋转矩阵。综上所述,测量点从激光扫描仪坐标系转换至WGS-84坐标系满足式(7),如果加入前述激光测距误差、系统安装角度误差、姿态角度误差、定位误差和杆臂向量误差影响时,测量点坐标在WGS-84地心地固坐标系中满足式(8)。
(7)

(8)
二、激光点云高精度校正的可行性分析
随着车载移动测量系统中核心传感器技术的发展,中高端激光扫描仪的测距精度一般都优于1 cm,POS系统与激光扫描仪的杆臂向量和安置角精度分别可以达到毫米以下量级和0.01°量级,而POS系统输出的俯仰角和横滚角精度可达0.005°,航向角精度可达0.008°[6]。
文中所使用测量系统激光测距精度为5 mm,相对于激光测距误差,杆臂向量误差可以忽略;POS系统的姿态角精度为0.08°,因此0.01°量级的安置角误差相对比POS姿态误差可以忽略。因此,测量系统的点云精度将主要由GNSS定位误差、激光测距误差和POS姿态角误差决定。通常情况下,水平和高程方向上的误差应在高斯平面直角坐标系中进行分析,即将式(8)中激光点云坐标进行高斯投影,并分别对平面和高程方向坐标进行微分运算。或者可以直接由式(4)将当地水平坐标系近似转换为高斯平面直角坐标系,主要在平面方向受航向角和子午线收敛角影响有一个旋转角。因此,对于较小面积的测区,可以将系统测量的激光点云平面和高程误差近似在当地水平参考坐标系中表达和分析[7]。根据式(4)将X、Y和Z各项误差因素取偏微分方程,则有如下形式
(9)

选取车载系统在高速公路运行的一段实际测量数据,其俯仰、横滚角在0°至5°之间,利用式(9)计算车辆在行驶过程中其中一帧线扫描数据由于姿态角随机误差导致的激光点云高程方向误差,如图2所示。图2中横轴为扫描仪垂直方向扫描角,以扫描仪坐标系Z轴反向为0°,逆时针为正向,其中扫描距离选用在高速公路测量时的最大值20m,姿态随机误差使用该段时间内姿态角误差绝对值的平均值。
通过图2可以看出,扫描角在10°左右时高程方向误差达到最大值,约为0.51cm,当扫描角固定为10°,即高程方向取得最大误差扫描角度时,由实时的姿态随机误差导致的整条测线高程误差曲线如图3所示。

图2 不同扫描角时姿态随机误差导致的高程误差
通过图3可以看出,在接近2h的整条高速公路测线测量中,车载激光扫描系统由于姿态随机误差导致的高程误差约为0.5cm。
为了分析在一定区间内GNSS定位误差对点云精度的影响,以动态方式测量沿线布设的12处特征点坐标,长度约700m,往返重复测量60次,点位坐标采用WGS-84坐标系统,平面坐标使用UTM投影方式,其中所选位置平面方向和高程方向重复测量相对精度见表1。

图3 特定扫描角下由姿态随机误差导致的整条测线高程误差曲线
由表1可以看出,高程方向相对精度优于0.8cm,平面精度优于0.5cm,综合考虑前一节的测距误差、姿态角和安置角误差对点云坐标误差的影响,由于上述误差是独立的,根据误差传播方程,平面和高程方向的综合误差均小于1cm。
计算结果表明,在一定的区间内,对于校正后内符合性精度比较好的高精度车载移动测量设备,由随机误差导致的激光点高程误差在1cm以内。在一定的时间和距离区间内GNSS星地几何关系、卫星数目、DOP精度因子[8]变化不大,在合理控制区间内,局部重力场[9]应变较小,区间内高程异常大小基本一致,可认为GPS绝对定位残余系统偏差[10]也基本一致,除上文提到的随机综合误差外,影响车载点云测量精度的残余偏差表现为较强的系统性,因此,可以通过布设靶标控制点,以合理控制区间进行点云高精度NURBS曲线高程纠正,以减弱GNSS定位误差、高程异常误差等影响绝对位置精度的区间系统残余偏差,从而满足公路高精度勘测要求。

表1 GNSS重复测量特征点坐标及高程相对精度
三、车载激光点云在银川公路改扩建中的应用
1. 银川高速公路改扩建项目设计方案
银川高速公路改扩建线路长约40 km,如图4所示。为满足高速公路改扩建要求,勘测数据高程中误差要求控制在2 cm以内,平面中误差在5 cm以内,粗差率控制在5%以内,同时为满足投影长度变形不得大于2.5 cm/km的规范要求,投影高程抵偿面设置为1000 m。
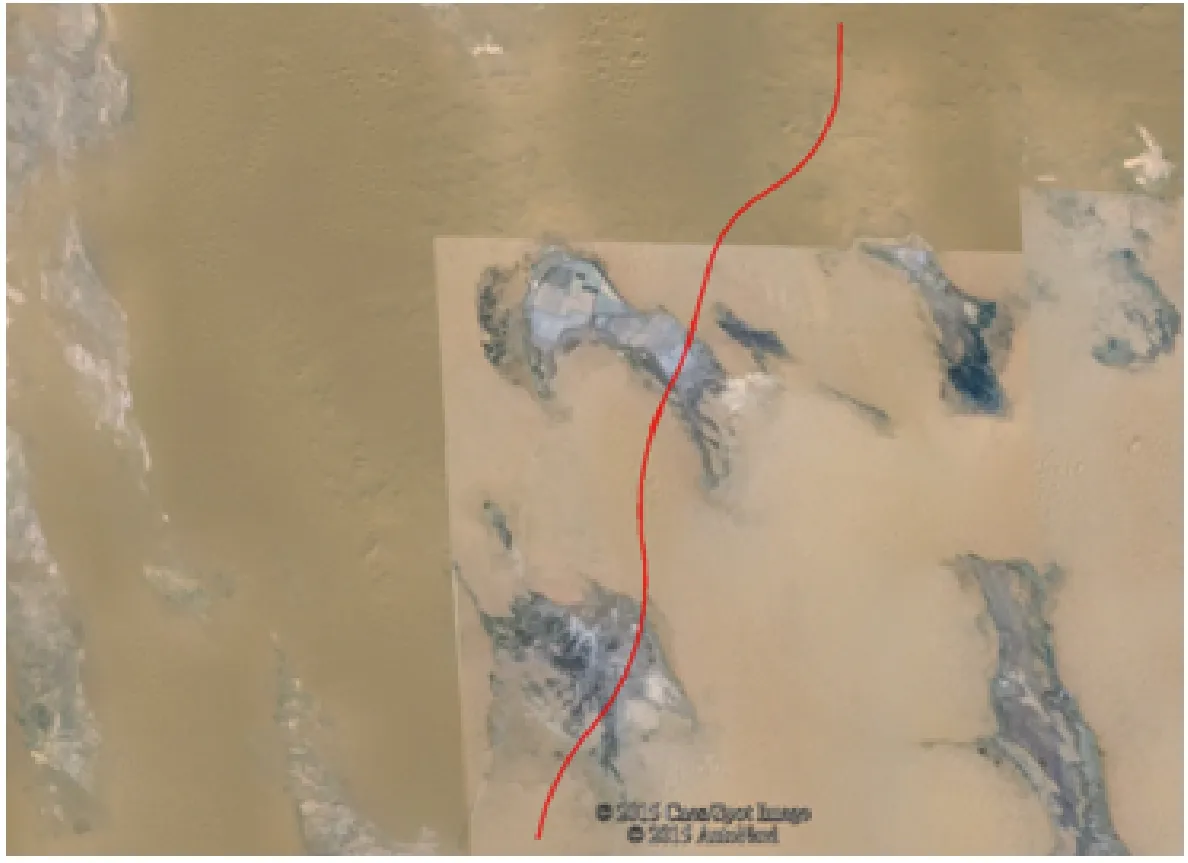
图4 银川公路改扩建路段
传统设计方案是沿线布设一定密度的测量控制点,通过水准联测获取控制点的1985国家高程基准下高程值。通过GNSS联测获取控制点的平面坐标,然后在测量控制点上架设高精度全站仪测定道路的横纵断面图及其他地形数据,工作量大,耗时较长。
本文将车载移动测量技术应用于高速公路改扩建项目中,同时为验证车载激光点云高精度校正的可行性及获取最佳布点方案,设计中沿高速公路两侧每200 m交错布设靶标控制点,并以人工水准的方式获取靶标控制点1985国家高程基准下高程值,以高精度RTK测量方式获取靶标控制点的平面坐标。其次,采用内符合精度较好的北京四维公司的车载移动测量系统沿道路两侧进行点云获取。数据处理时首先通过布尔莎模型将车载点云数据转换到投影高程抵偿面,然后采用芬兰的Microstation点云插件分段进行车载点云数据的平面和高程校正。
2. 银川高速公路车载点云精度统计与分析
为了根据车载移动测量的内符合性获取最佳的靶标控制点布设方案,本文采用了不同间隔的靶标控制点校正方案。统计时根据点云强度值区分出靶标点云,并根据靶标几何特征获取靶标的中心位置坐标数据,如图5所示,实测对比统计数据见表2。
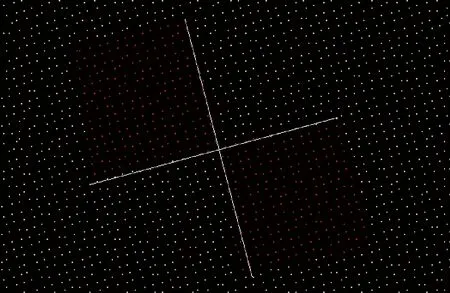
图5 靶标控制测量点

控制点间隔无控制200m300m500m1000m高程粗差率0.20%3.80%6.40%16.30%剔除粗差前高程中误差/m0.0460.0110.033剔除粗差后高程中误差/m0.0110.015剔除粗差前平面中误差/m0.0670.0340.042剔除粗差后平面中误差/m0.0320.036
粗差率超过5%的部分方案,本文未予统计。由表2可以看出,300 m间隔的靶标控制方案既能够提高车载点云的精度,满足公路勘测要求,也可以在一定程度上节省人工,同时也是北京四维车载移动测量系统内符合精度的一种实践体现。车载移动测量系统在银川高速公路采集数据时基本保持40 km/h匀速行驶,因而本文用实例验证了在一定时间和距离区间内,通过与自身内符合精度相适应的靶标控制方案进行车载点云高精度校正的可行性。
四、结束语
本文从理论上对车载移动测量系统数据获取原理进行了阐述,并估计和分析了车载移动测量误差,论证了利用靶标控制点分段进行车载激光点云高精度校正的可行性,并通过实例验证了基于靶标控制点进行车载激光点云高精度纠正的可行性,为高速公路勘测提供了新的思路,节省了人工,规避了高速作业风险,具有借鉴价值。
[1]张成.车载移动扫描测量技术在公路设计中的应用[D].西安:长安大学, 2011.
[2]赵松,西勤,刘松林,等.基于回光强度的地面三维激光扫描仪测距误差模型[J].测绘科学,2013(5):169-174.
[3]郭波, 屈孝志,黄先锋,等.车载移动立体测量系统检校及精度分析[J].激光与红外,2011, 41(11): 1205-1210.
[4]何林,柳林涛,许超铃,等.常见平面坐标系之间相互转换的方法研究[J].测绘通报,2014(9):6-11.
[5]李鑫.车载移动测量系统误差分析与检校方法研究[D]. 郑州:信息工程大学,2012.
[6]郑德华,沈云中,刘春.三维激光扫描仪及其测量误差影响因素分析[J].测绘工程, 2005,14(2):32-34.
[7]FILIN S. Recovery of Systematic Biases in Laser Altimetry Data Using Natural Surfaces [J]. Photogrammetric Engineering and Remote Sensing, 2003, 69(11):1235-1242.
[8]李建文,李作虎,周巍,等.卫星导航中几何精度衰减因子最小值分析及应用[J].测绘学报,2011,40(5):85-94.
[9]陈俊勇.给定内插高程异常值的精度时对GPS水准网格间距的考虑[J].测绘学报,2003,32(2):38-41.
[10]刘忠,瞿伟,王少闽.利用半参数化模型精化GPS绝对定位中残余的系统偏差[J].测绘工程,2007(5):29-30.
Analysis of High-accuracy Calibration Feasibility for Laser Point Cloud Scanned by Vehicle-borne Mobile Mapping System in Freeway Surveying
WEI Guozhong, HOU Fei, ZHANG Heng, WU Xuechao
10.13474/j.cnki.11-2246.2016.0248.
2015-08-11
测绘地理信息公益性行业科研专项(201412008)
魏国忠(1973—),男,高级工程师,主要研究方向为遥感数据获取与处理。E-mail:weiguozhong@126.com
P234.4
B
0494-0911(2016)08-0020-05
引文格式:魏国忠,侯飞,张衡,等.高速公路勘测中车载激光点云高精度校正可行性分析[J].测绘通报,2016(8):20-24.