基于重力加速度的采煤机摇臂摆角检测装置
2016-09-07赵名
赵名
(天地科技股份有限公司 上海分公司, 上海 200030)
基于重力加速度的采煤机摇臂摆角检测装置
赵名
(天地科技股份有限公司 上海分公司, 上海200030)
针对基于转角位移检测原理的采煤机摇臂摆角检测装置安装精度要求高、校准复杂等问题,设计了基于重力加速度的采煤机摇臂摆角检测装置。该装置利用SCA830倾角检测计来获取装置绝对倾角,再根据机身倾角和装置在摇臂上的安装位置计算出摇臂实际摆角。实验结果表明,该装置安装、校准方便,检测结果较准确,而且反映迅速、实时性较好。
采煤机; 摇臂摆角检测; 重力加速度; 倾角检测计; 校准
网络出版地址:http://www.cnki.net/kcms/detail/32.1627.TP.20160601.1022.005.html
0 引言
当采煤机割煤时,工人需实时知道摇臂滚筒割煤的高度。因为井下割煤现场光线暗、煤尘大、可见度不高,靠肉眼观察滚筒高度不仅准确率低,而且增加了工人的劳动强度,滚筒周边的煤尘也会损害工人健康。采煤机摇臂摆角自动检测装置可自动地准确获知滚筒采高[1]。常用的摇臂摆角检测装置是基于转角位移原理,即传感器一部分安装在采煤机机身上,另一部分与摇臂相连,当摇臂摆动时,靠2个部分的相对转角位移确定摇臂摆角。这种方法的优点是可靠性高,缺点是安装复杂,安装精度要求高,校准费时,且使用过程中会因煤块撞击等因素容易损坏装置。为克服以上弊端,本文设计了基于重力加速度的采煤机摇臂摆角检测装置[2-6]。
1 装置硬件设计
基于重力加速度的采煤机摇臂摆角检测装置由SCA830倾角检测计、外围电路、MSP430F249低功耗单片机等组成。SCA830倾角检测计是基于重力加速度的单轴倾角检测仪器,其量程为±1g,具有SPI数字通信接口,输出代表加速度大小的AD转换值(输出范围为-32768~32768)。单片机读取SCA830输出的数字量,计算出装置当前的绝对倾角,然后再根据装置敏感轴与摇臂摆动轴间的固有夹角及采煤机机身当前倾角计算出采煤机摇臂的实际摆角,最后将摆角信息通过RS485总线传输给采煤机主控系统,主控系统再计算滚筒当前采高。
摇臂摆角检测装置电路如图1所示。
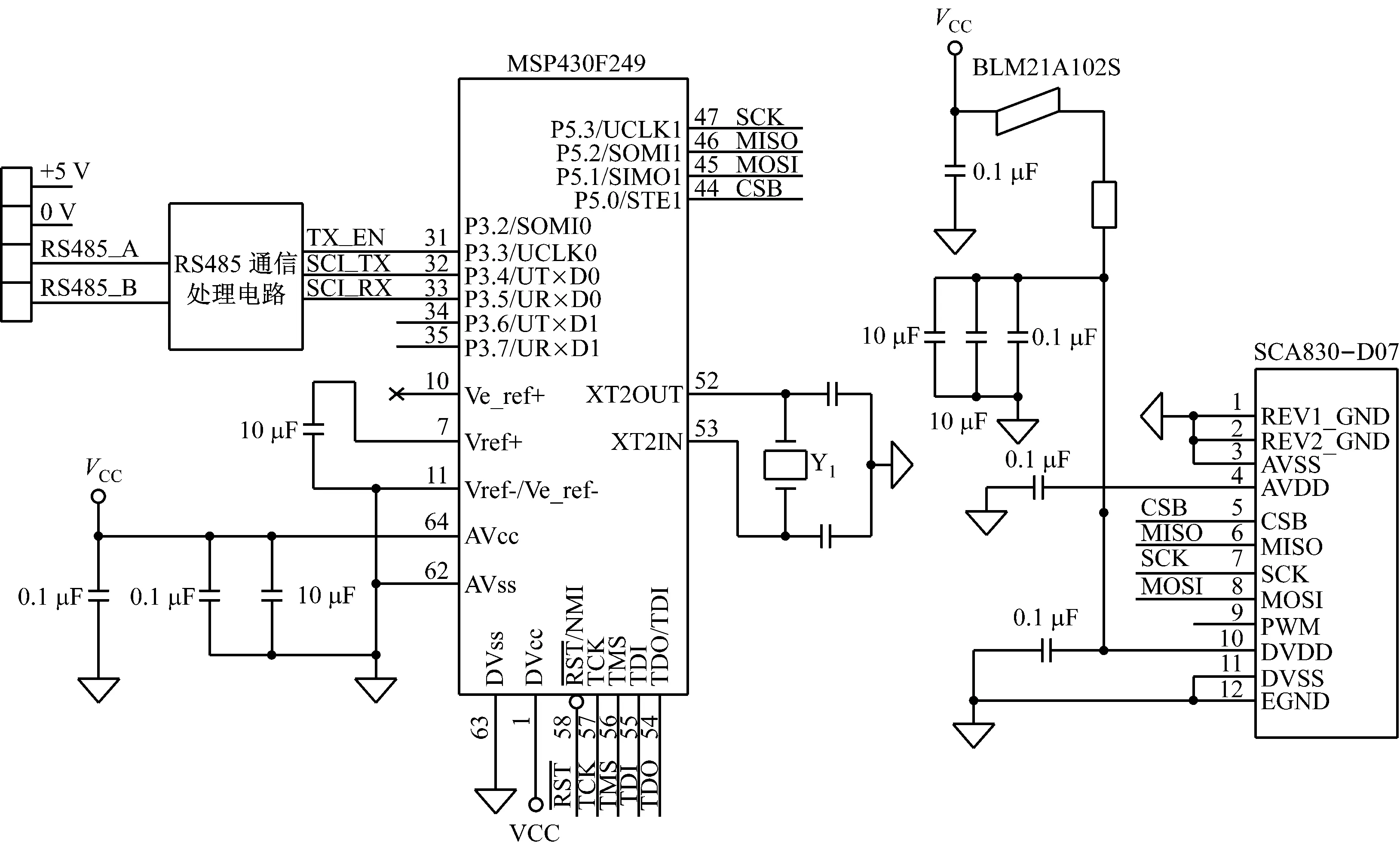
图1 摇臂摆角检测装置电路
2 装置软件设计
2.1摇臂摆角计算
摇臂回转中心到滚筒中心的连线称为摇臂摆动轴。采煤机摇臂摆角计算如图2所示。
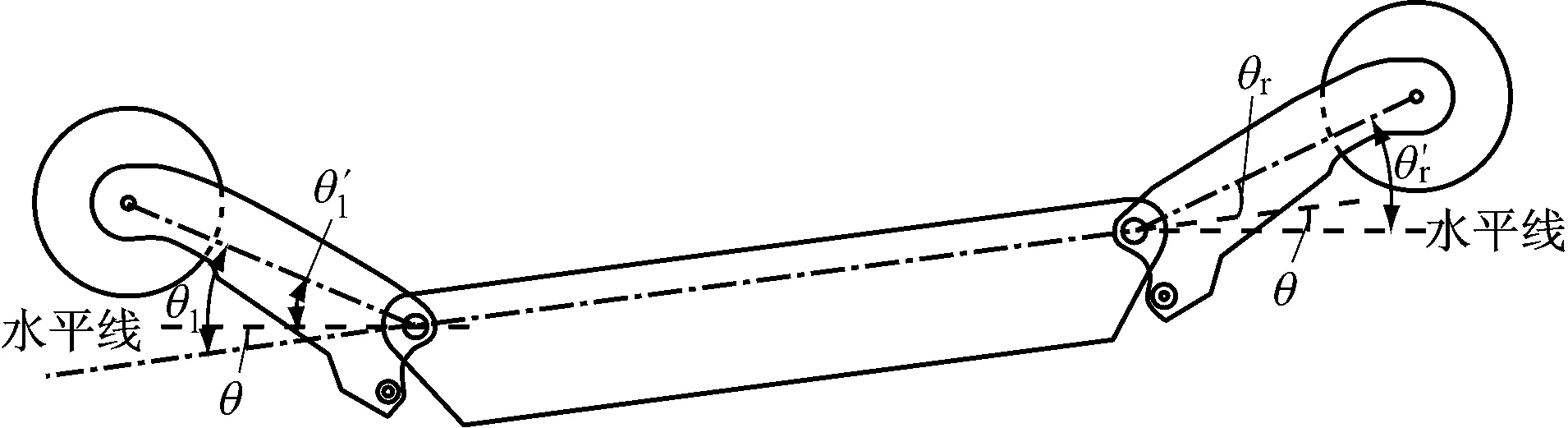
图2 采煤机摇臂摆角
根据图2,有
(1)
(2)

因为SCA830倾角检测计存在个体差异,加上它在摆角检测装置内的安装位置误差,所以最好对每个摆角检测装置进行校准。需校准的参数为装置比例系数和零点漂移。校准公式如下:
(3)
(4)
式中:s为装置的比例系数;N1为装置位于90°时SCA830输出的数字量;N2为装置位于-90°时SCA830输出的数字量;f0为装置零倾角位的漂移。
装置的绝对倾角为
(5)
式中N为SCA830输出的数字量。
摆角检测装置安装于摇臂上后,其自身敏感轴与摇臂摆动轴之间可能有一个夹角,因此将式(1)、式(2)修正为
(6)
(7)
式中θ0为装置自身敏感轴与摇臂摆动轴之间的夹角。
在将装置安装到采煤机上之前须校准比例系数及零点漂移,获得s和f0。在摇臂上安装好装置后,输入零摆角校准命令字,计算并记录θ0。参数经厂家工作人员设定后无需更改,煤矿工人直接使用即可。
2.2滤波方法
采煤机摇臂在升降动作及割煤动作中会有振动,所以基于加速度检测原理的SCA830倾角检测计的输出值是波动的,而且波动范围较大。因摇臂倾角的变化是连续缓慢的,所以体现倾角变化的数字输出量应该是低频变化的,高频波动一定不是由摇臂倾角变化带来的。为了获取实际反映摇臂倾角变化的数据,需对SCA830倾角检测计的原始输出进行滤波,剔除干扰。一般采煤机摇臂从最低处摆至最高处,空载时最快要十几秒,频率在0.1 Hz以下,属于低频。频率高于0.1 Hz的加速度变化都不是由摇臂摆角变化带来的,可以滤除。本装置结合平均值法和滞后法来滤波。
令单片机每经1个采样周期t触发1轮采样,1轮采样中单片机连续读取8次SCA830倾角计输出值,再取平均值作为采样结果xn。
滞后法是一种低通滤波方法,滤波公式为
(8)
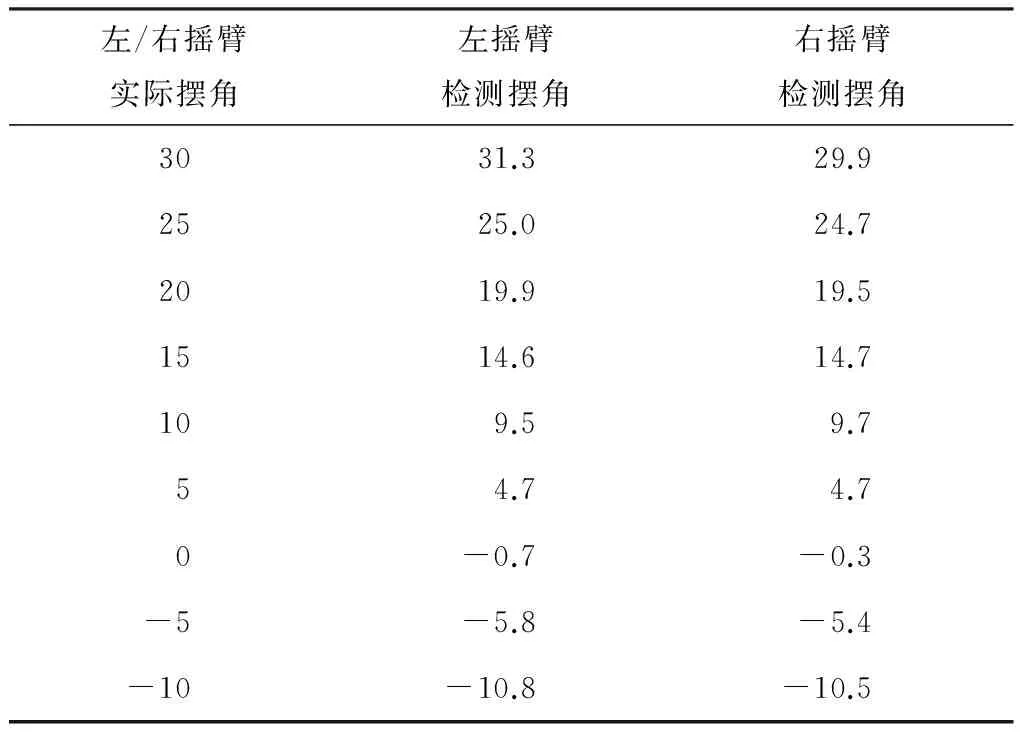
式中:yn为本次滤波结果;a为滤波系数,0 截止频率fL为 (9) 2.3软件流程 装置主程序流程如图3所示。图3中虚线框内步骤为装置校准时用,一般在采煤机出厂前对装置进行校准,出厂后用户不需要校准。 结合理论与实践来选择合理的采样周期t和滤波系数a值,分别将采样周期t设为5,10 ms,每5,10 ms触发一轮采样并取平均值;分别取a为1/32,1/64进行实验。将装置以30°左右的角度固定在振动实验台上,进行变频振动实验,观察装置检测结果,实验数据见表1。 经比照检测结果准确性,兼顾要获取较低的截止频率,最终选取a=1/64,t=10 ms。将a,t代入式(8),得 (10) 在上述条件下,滤波的截止频率为0.25 Hz。 将2个校准好的摆角检测装置分别安装于采煤机左右摇臂上,将摇臂置于零摆角位。输入零摆角校准命令字,确定零摆角位并存储下来,摆角检测装置即可正式使用了。分别将左右摇臂升降到一定角度,观察装置的输出,比较装置检测到的摇臂摆角与实际摆角的差别。表2为一组测试数据。 图3 装置主程序流程 振动频率/Hz检测装置输出角度/(°)a=1/32a=1/64t=5mst=10mst=5mst=10ms2528.4~29.229.2~29.428.6~28.728.73527.6~29.829.2~29.328.628.74526.3~30.729.1~29.327.7~28.628.5~28.75021.0~21.226.0~26.122.0~22.124.35517.1~17.223.1~23.217.119.76528.2~28.929.0~29.328.128.37528.3~29.229.2~29.328.5~28.628.6~28.78528.5~29.029.328.628.7 表2 一组测试数据 (°) 实验结果表明,该装置检测结果较准确,而且反映迅速,实时性较好。 基于重力加速度的采煤机摇臂摆角检测装置安装方便,校准过程简单。实验结果表明,该装置可以实时监测到采煤机摇臂摆角的变化,从而使采煤机主控系统准确获知滚筒的采高,方便了工人的操作。 [1]李庆亮,朱信平,张斌,等. 采煤机位姿参数测量系统设计及测量方法[J]. 煤炭科学技术,2013,41(8):99-101. [2]张群英.基于ADXL345的提升机容器姿态感知系统设计[J].工矿自动化,2014,40(7):25-28. [3]郭敏,尹光洪,田曦,等.基于三轴加速度计的倾斜角传感器的研究与设计[J].现代电子技术,2010,33(8):173-177. [4]苏君,王占平.基于MEMS加速度传感器的倾角仪设计方法[J].实验科学与技术,2006,4(增刊1):112-114. [5]于娜,刘志远,赵佳龙.倾角传感器的温度补偿研究[J].传感器与微系统,2014,33(10):14-16. [6]周庆飞,徐明龙.基于MSP430的高精度倾角测量系统设计与实现[J].自动化与仪器仪表,2011(1):40-42. Shearer rocker swing angle detection device based on gravity acceleration ZHAO Ming (Shanghai Branch, Tiandi Science and Technology Co.,Ltd., Shanghai 200030, China) In view of problem that shearer rocker swing angle detection device based on angular displacement detection principle requires high installation precision and has complex calibration, a shearer rocker swing angle detection device based on gravity acceleration was designed. The device uses inclinometer SCA830 to get absolute incline angle of the device, and then calculates out actual swing angle of the shearer rocker according to shearer incline angle and the device's installation location. The experimental results show that the device is easy to mount and calibrate, and has accurate test results, quick response and good real-time performance. shearer; rocker swing angle detection; gravitational acceleration; inclinometer; calibration 1671-251X(2016)06-0016-04 10.13272/j.issn.1671-251x.2016.06.005 2016-01-20; 2016-04-19;责任编辑:胡娴。 天地科技股份有限公司技术创新基金项目(KJ-2014-TDSH-03)。 赵名(1978-),女,黑龙江鸡西人,工程师,硕士,研究方向为采煤机电气控制、传感器应用设计,E-mail:zm007ok@163.com。 TD632 A网络出版时间:2016-06-01 10:22 赵名.基于重力加速度的采煤机摇臂摆角检测装置[J].工矿自动化,2016,42(6):16-19.3 实验论证
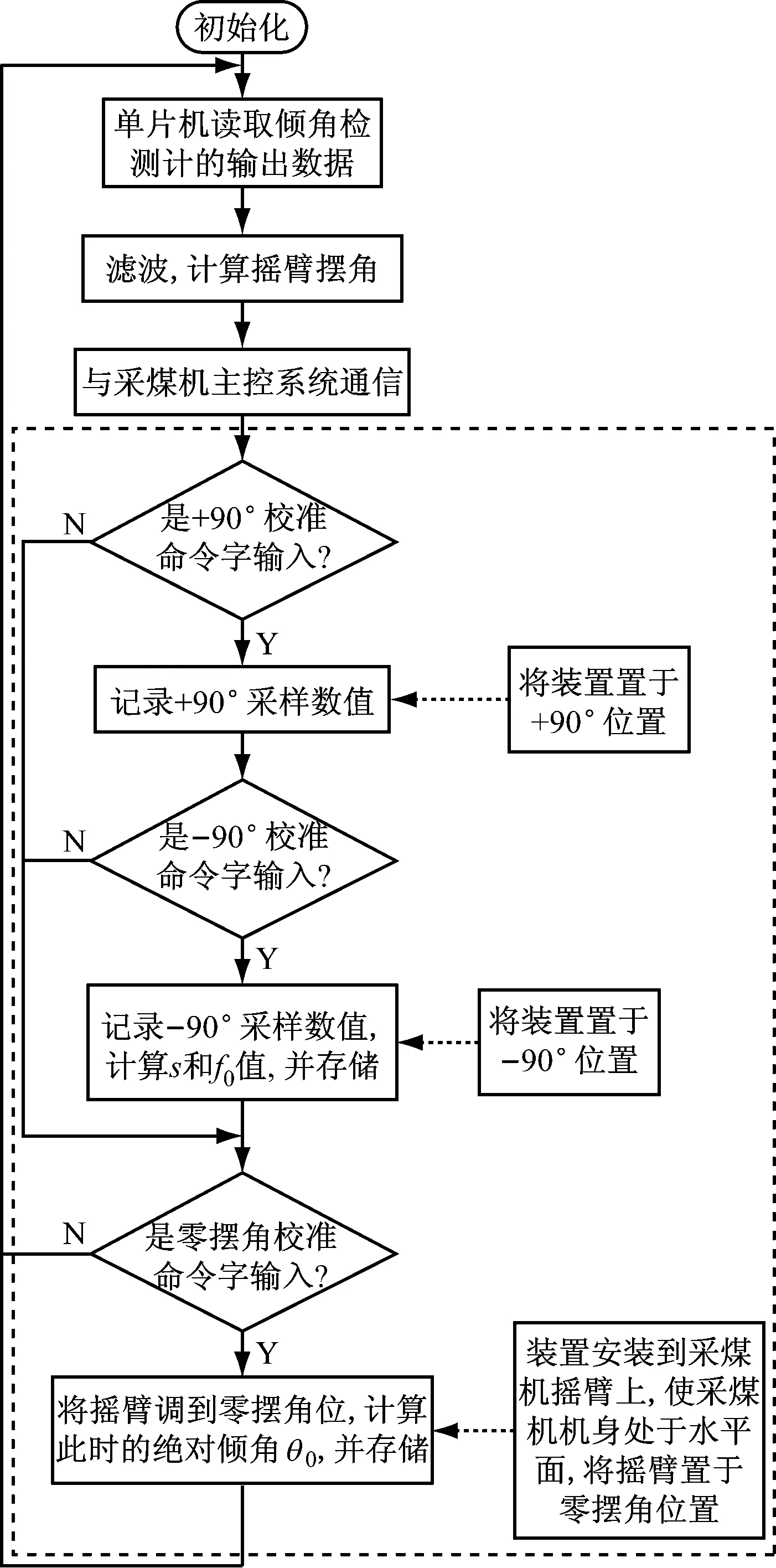
4 结语
