威力铭W518S加工中心五轴联动UG后置处理设计
2016-09-07李号召刘东晓王彦伟
王 勃,李号召,董 晓,刘东晓,王彦伟
(中国航空工业集团公司洛阳电光设备研究所,河南 洛阳 471000)
威力铭W518S加工中心五轴联动UG后置处理设计
王勃,李号召,董晓,刘东晓,王彦伟
(中国航空工业集团公司洛阳电光设备研究所,河南 洛阳 471000)
针对瑞士威力铭公司W518S加工中心进行了五轴联动加工的UG后置处理设计研究。其具体内容包括:FANUC数控系统五轴联动专用模块程序的特点及相关指令介绍;五轴联动后置处理设置内容介绍;特殊指令的TCL程序语言说明;叶轮等试验零件五轴联动加工等。通过对成熟使用的UG五轴联动后置处理开发的介绍,为其他设备的UG五轴联动后置处理开发提供了借鉴。
五轴联动;UG;后置处理;TCL语言
本文主要通过对瑞士威力铭公司W518S加工中心五轴五联动的UG后置处理设计,来实现该设备的五轴联动加工功能。W518S加工中心是从瑞士引进的五轴精密镗铣加工中心,最高转速可达20 000 r/min,结构为主轴摆动的五轴加工中心(B轴摆动),操作系统为FANUC系统。该设备具有专门的五轴联动加工模块,需要利用设备的TCP(Tool Center Point Control)功能,对其中的G43.4、G849、G841和G843等多个特殊指令进行设置,从而完成较为复杂的五轴联动UG后置处理设计。
1 五轴联动后处理研究流程
五轴联动后置处理设计主要研究内容包括:1)掌握五轴联动模块特殊指令含义及程序特点;2)应用UG/Post Builder软件,进行UG后置处理设计;3)对部分特殊指令进行TCL语言解读;4)应用UG软件对试验零件进行五轴联动程序刀轨设计,进行试验零件加工,验证后置处理正确性。
主要研究流程[1]如图1所示。
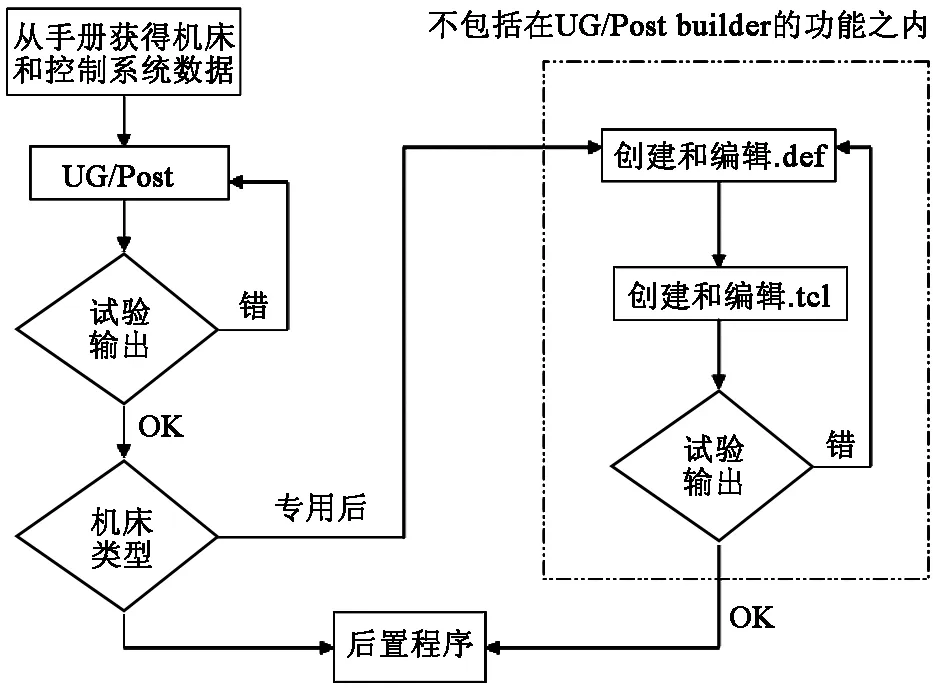
图1 主要研究流程
2 五轴联动加工模块的UG后置处理设计
2.1W518S加工中心五轴联动模块介绍
W518S加工中心的五轴联动采用全程刀尖跟踪功能,与一般的3+2五轴加工有着明显的区别。
首先,加工中心通过G5 P10000指令进入AInanoHPCC模式后即进入五轴联动加工模式,其后每句程序均具有刀尖跟踪功能,其加工坐标系固定,Z正方向始终垂直于工作台向上,不随B轴数值变化而旋转。而在3+2五轴加工中,虽然G802或G806指令起角度也有刀尖跟踪的功能,但仅限本句程序,并且坐标系随B轴旋转,Z正方向始终指向主轴方向。
其次,进入AInanoHPCC模式后具有的刀尖跟踪功能与进入该模式前有着明显区别,例如,同样程序G0 X0 Y0 Z0 B30 C0;在初始状态以及进入该模式前、后运行的结果如图2所示。
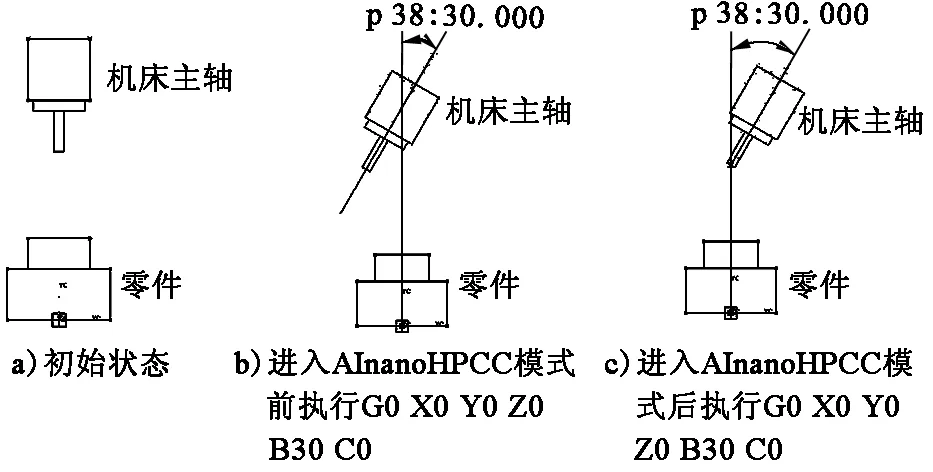
图2 初始状态及进入AInanoHPCC模式前、后状态
最后,AInanoHPCC模式具有对程序预读功能,可提前预读多段程序,保证程序在五轴联动加工中运行流畅。
综上所述,W518S加工中心是通过进入AInanoHPCC模式后,对刀尖坐标及B、C轴角度值的控制来实现五轴联动加工的。
2.2五轴联动数控程序基本格式
W518S加工中心针对五轴联动加工采用TCP(五轴联动加工的刀具中心点控制)模式来实现,TCP的加工程序结构如下。
激活:
G806 T.. B.. H.. R0调刀并取消坐标旋转跟踪
M70解锁B轴
M72解锁C轴
G841选择工作台坐标系统为固定工作坐标系并进入C轴跟踪
G5 P10000激活AInanoHPCC模式
G43.4 H..TCP模式并添加刀具长度补偿
G0 X.. Y.. Z.. B.. C.. G0位置
G1 X.. Y.. Z.. B.. C.. 开始加工
……
……
取消:
G1 X.. Y.. Z.. B.. C..加工
M71B轴锁定
M73C轴锁定
G0 G49 Z..TCP模式和刀具长度补偿取消
G5 P0AInanoHPCC模式取消
G849取消C轴跟踪,进入一般加工状态
G53 X0 Y0 Z0 B0 C0返回机床零点
M30程序结束
UG后置处理设置应满足上述程序格式,并保证G849、G43.4、G5 P0和G5 P10000等特殊指令功能实现,X、Y、Z、B和C等轴的坐标值生成正确。
2.3五轴联动后处理基本设置
通过UG后置处理构造器(UG/Post Builder)设计五轴联动后置处理,满足上述程序格式要求,并保证输出程序正确。具体设置如下。
1)根据机床实际情况对机床结构进行设置,设置为主轴摆动和工作台旋转式五轴加工中心。其中,第4轴B轴旋转范围为-10°~+100°,第5轴C轴设置为-360°~+360°。机床具体结构如图3a所示,在UG/Post Builder中的设置如图3b所示。

图3 UG/Post Builder软件中机床结构及B、C轴设置
2)在UG/Post Builder中对直线移动(G1)、快速移动(G0)进行设置,要求X、Y、Z的坐标值及B、C数值强制输出。具体设置如图4和图5所示。
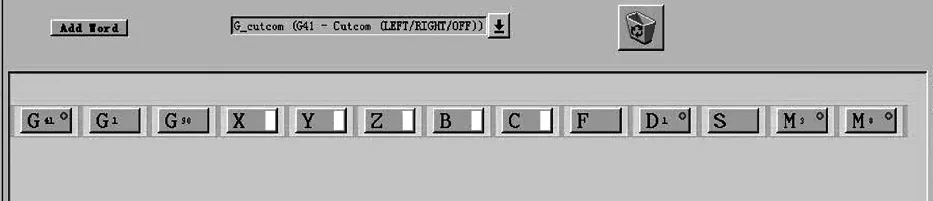
图4 直线移动(G1)设置

图5 快速移动(G0)设置
3)对五轴联动模块中特殊指令在程序头、尾处进行设置,保证程序正确进入和退出五轴联动模块。其中,程序头包含的特殊指令有G806、M70、M72、G841、G5 P10000和G43.4 H11等,程序尾处包含的特殊指令有M71、M73、G49、G5 P0和G849等。具体设置如图6所示。

图6 程序开头和程序结尾设置
2.4特殊指令所对应的TCL语言
TCL是一个交互式解释性计算机语言,它包含两部分:1个语言和1个库。UG后置处理构造器使用TCL作为它的命令语言[2]。该五轴联动后置处理中特殊指令及程序开始、结尾处设置所对应的TCL语言如下。
1)M70、M72、G841、G5 P10000和G43.4 H11等指令定义:
BLOCK_TEMPLATE start_of_path
{
Text[M70]
}
BLOCK_TEMPLATE start_of_path_1
{
Text[M72]
}
BLOCK_TEMPLATE start_of_path_2
{
Text[G841]
}
BLOCK_TEMPLATE start_of_path_3
{
Text[G5 P10000]
}
BLOCK_TEMPLATE start_of_path_4
{
Text[G43.4 H11]
}
2)G849、G5 P0、G49、M73和M71等指令定义:
BLOCK_TEMPLATE end_of_program_3
{
Text[G849]
}
BLOCK_TEMPLATE end_of_program_4
{
Text[G5 P0]
}
BLOCK_TEMPLATE end_of_program_5
{
Text[G49]
}
BLOCK_TEMPLATE end_of_program_6
{
Text[M73]
}
BLOCK_TEMPLATE end_of_program_7
{
Text[M71]
}
3)程序开始部分TCL语言设置:
=======================
proc MOM_start_of_path { } {
=======================
global mom_sys_in_operation
set mom_sys_in_operation 1
global first_linear_move; set first_linear_move 0
TOOL_SET MOM_start_of_path
if [llength [info commands PB_CMD_kin_start_of_path] ] {
PB_CMD_kin_start_of_path
}
PB_CMD_tool_change_force_addresses
MOM_force Once T
MOM_do_template tool_change_1
PB_CMD_Tool_info
MOM_do_template start_of_path
MOM_do_template start_of_path_1
MOM_do_template start_of_path_2
MOM_do_template start_of_path_3
MOM_do_template start_of_path_4
}
4)程序结尾部分TCL语言设置:
=======================
proc MOM_end_of_program { } {
=======================
MOM_do_template end_of_program_7
MOM_do_template end_of_program_6
MOM_do_template end_of_program_5
MOM_do_template end_of_program_4
MOM_do_template end_of_program_3
MOM_do_template end_of_program_2
MOM_do_template end_of_program
MOM_do_template rewind_stop_code
PB_CMD_Machine_time
MOM_set_seq_off
}
3 五轴联动后处理试验验证
3.1数控程序格式验证
通过UG软件使用新开发后置处理进行程序自动生成,验证程序格式正确性。保证程序头、尾处特殊指令正确生成,保证G1、G0指令后X、Y、Z、B和C数值强制输出。自动生成的程序头、尾处程序如图7所示。
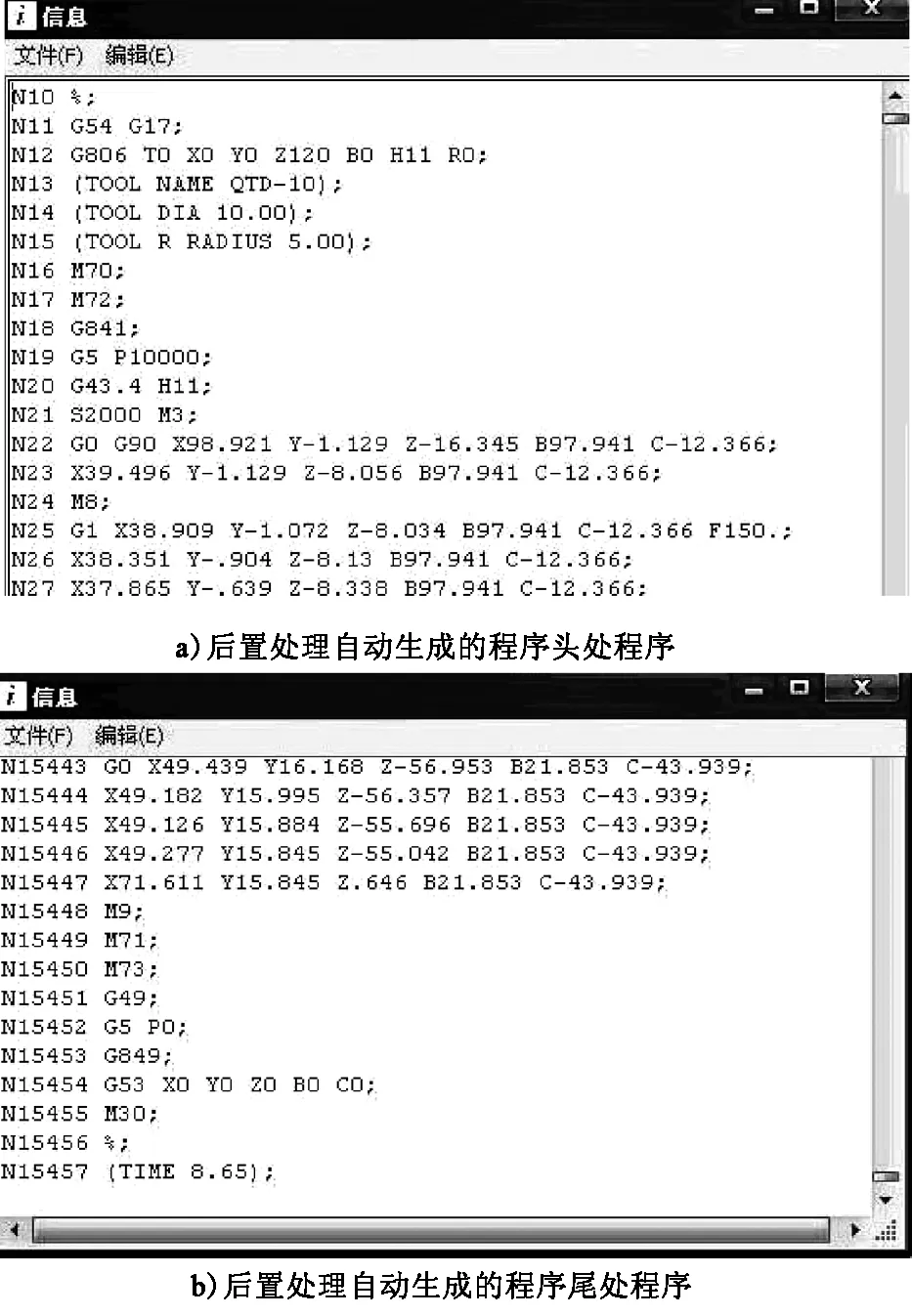
图7 后置处理自动生成的程序头、尾处程序
3.2试验件加工
UG软件通过控制刀具轴矢量、投影方向和驱动方法来生成加工轨迹[3],然后利用后置处理生成五轴联动加工程序。在W518S设备上使用生成的五轴联动加工程序对半球面、单个叶片和叶轮进行加工,充分验证了后置处理的正确性。加工完成的试验零件如图8所示。
图8 试验零件
4 结语
五轴联动加工是应用广泛且先进的加工方式,由于5个空间轴可以同时联动,可以实现更为复杂的零件的加工,尤其在复杂多曲面的零件加工中具有明显优势。本文基于瑞士威力铭W518S加工中心,通过UG/Post Builder软件对该设备五轴联动模块进行后置处理设计,实现UG软件五轴联动程序G代码的自动生成,使该设备具备五轴联动加工能力。同时,较详细介绍了后置处理的具体研究过程,为类似设备的五轴联动UG后置处理开发提供了技术参考和借鉴。
[1] 安杰,等.UG后处理技术[M].北京:清华大学出版社,2003.
[2] 张磊,等.UG NX4后处理技术培训教程[M].北京:清华大学出版社,2007.
[3] 李朝光,谢龙汉.UG NX5多轴加工及应用实例[M].北京:清华大学出版社,2007.
责任编辑郑练
The Design of Five-axis NC Post-processing of the Willemin-macodel Company’s Machine-W518S based on UG Software
WANG Bo, LI Haozhao, DONG Xiao, LIU Dongxiao, WANG Yanwei
(Luoyang Institute of Electro-optical Equipment, AVIC, Luoyang 471009, China)
Mainly introduce the design process of the five-axis NC post-processing which is used on Willemin-macodel Company’s machine-W518S based on UG software. The concrete content includes: the modules and commands related to five-axis NC machining of the FANUC system, how to set the parameters of the five-axis post-processing, how to enable special features by programming in TCL languages, the five-axis milling of experiment part-integral impeller. Hope to provide more or less reference for the design of other machines’ five-axis post-processing by the maturely used post-processing which is introduced in this paper.
five-axis machining, UG software, post-processing, TCL language
TH 166
A
王勃(1984-),男,大学本科,工程师,主要从事CAD/CAM、精密机械加工和数控加工编程等方面的研究。
2015-12-01
