基于对称性的车辆检测方法研究
2016-09-07牛瑞丽山东省菏泽市交通运输局山东菏泽274900
牛瑞丽(山东省菏泽市交通运输局,山东 菏泽 274900)
基于对称性的车辆检测方法研究
牛瑞丽
(山东省菏泽市交通运输局,山东 菏泽 274900)
随着我国科学技术的不断发展,车辆检测方法也越来越多,在我国智能交通行业中,车辆检测技术是必不可少的,其融合了识别技术以及统计技术等,检测速度和准确性都非常高,可以从根本上起到优化智能交通系统的作用。
对称性;车辆检测;背景图像
0 引言
运用车辆检测技术,可以检测道路中的对象车辆,并明确其所在位置。但车辆检测干扰因素比较多,定位难度比较大。专业人员在结合帧差法、光流法等算法的基础上,创新出了基于对称性的快速车辆检测方法,可以实现车辆准确定位。本文主要进行基于对称性的车辆检测方法运用情况研究。
1 对称性原理分析
第一,针对需要处理的汽车图像,进行垂直性的边缘观察和检测;第二,针对垂直性的边缘图像,按照从左到右的顺序,挑选各列垂直线,当成核心对称轴,并使用其当作水平中心矩形,该矩形宽度在最值范围内明确相应的对称点数量;第三,明确该宽度下的矩形范围中的对称度(sym),使得其为s2/n,其中,s代表对称轴两端的对称点数,n代表矩形范围中的垂直边缘点数[1]。明确各列对应的对称度,如果该对称度大于基本对称度阀值的话,就意味着中心对称轴上面有车辆。
2 检测图形预处理方法分析
(1)道路背景处理。在进行车辆检测的时候,涉及的道路环境条件比较复杂,客观影响因素也比较多。因此,必须落实好背景预处理工作,不然会导致实际检测过程复杂化,导致检测结果准确性降低。在相同的道路上,除了汽车所在范围,其他范围道路图像和背景图像都是统一的,在利用道路图像的基础上进行减操作,可以起到减弱背景图像的效果。要想从根本上掌握全面的车辆边缘数据,优化算法效果,采取车辆边缘增强算子非常必要。Sobel算子有减弱噪声的优势,可以快速检测出相关边界数据,本文主要运用该算子进行车辆边缘增强操作。在整个算法当中,对称性计算是非常重要的,也是非常复杂的,尤其是计算灰色图像对称性的时候,耗费的时间比较多。本文主要在计算最大类间方差值的基础上计算全局阈值。
(2)图像缩放处理。在实际的车辆图像检测过程中,不同车辆和相应摄像头之间的距离是不同的,这样就会导致汽车尺寸大小不一。随着和摄像头之间距离的不断增加,相应的汽车尺寸也不断减小。所以,在评估sym=s2/n>T公式成立与否的过程中,随着车辆距离的不断变化,相应的T值也是不同的。要想处理好该问题,可以运用合理分割方式,将垂直边缘检测图分成相应的近景图像、中景图像以及远景图像。进行分割图放缩处理,进而明确三大图像对应的阀值。
3 基于对称性的车辆检测算法描述
(1)及时明确对称轴。基于对称性的车辆检测算法,其关键是通过明确汽车对称性来提升车辆检测准确率。因此,对称轴明确是运用该算法的基础及核心。比如针对远景图,图1是在运用sym=s2/n算法和Sobel算子的基础上进行远景图对称轴计算的最终结果[2]。
从图1中可以看出,汽车局部往往就符合对称性要求,计算出的对称轴也不止一条,进行对称轴合并操作是非常必要的。
(2)有效合并对称轴。首先,要明确合并组。两车如果满足平行行驶条件,相应的对称轴和车宽就是相统一的,因此,汽车相同,检测出的相邻对称轴对应的距离往往比相应的标准宽带要小。然后,计算出那些在合并组中以对称轴为中心的的左右两边的水平最值,包括最大值和最小值。其次,在计算出最大值和最小值后,以两值之和除以2,得出合并之后相应的对称轴。
最后,计算最大值和最小值之间的差额,该差额即为合并后相应的汽车宽度。
(3)明确汽车垂直位置。要想从根本上明确汽车垂直位置,就必须首先了解相应的水平边缘检测图的内容。在进行汽车水平边缘检测的时候,车辆底端阴影往往是比较多的,对应的像素密度也很高。要想明确汽车垂直位置,要针对各个对称轴,明确相应的矩形框,该矩形框用d×h来表示,沿着对称轴,从底部开始向上移动,达到某位置后,矩形框填充度超过相应阀值的话,就意味着该处为汽车底端[3]。
(4)近、中、远景实验结果分析及合并。本文算法进行了图像分割,所以,针对同个汽车来说,往往会被分到不同图像中,导致车辆检测数量不一。在这样的情况下,必须实现相同汽车检测数据的有效合并。具体运用的算法如下所示:针对近、中、远景相应实验结果来说,在一定缩放比例下可以还原到最初图像当中,具体如图2所示。从图2当中能够看出,3线、4线和5线,8线、9线、10线和11线代表相同车辆在不同图像下的呈现,必须采取合并措施。
进行合并结果评估和分析。比如上图当中的线4、5,相应的对称轴之间的长度是有限的,但是,仅仅判断该长度是不能决定最终合并结果的,因为就算距离较短,对应的对称轴或许也是相同水平部位汽车检测后形成的。因此,必须适当增添有效的约束条件,决定最终是否能合并。根据上图2可知,在相同车道上的车辆,它们之间的距离肯定超过了车长,而针对线4、5来说,对应的垂直长度远远低于汽车长度,所以应当采取合并措施。
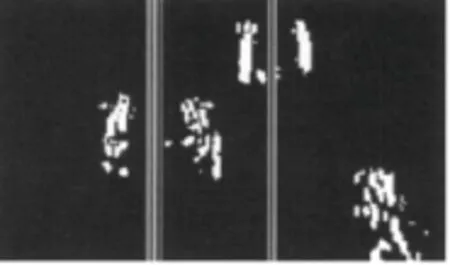
图1 远景图对称轴检测

图2 近、中、远景图像合并
合理取舍合并结果。针对垂直部位低的水平线来说,往往应当看成是汽车底部,这里所谓的汽车宽度对应的就是水平线宽度。
4 结语
综上所述,如今,基于对称性的车辆检测方法被创新出来,可以从根本上提升车辆检测速度,避免车道线等相关因素影响,彰显车辆图像,明确图像车辆位置,在水平检测基础上明确汽车在图像中的垂直位置,检测效率较高,值得大范围推广和应用。
[1]段建民,刘冠宇,郑榜贵等.基于视觉及多特征的前方车辆检测算法[J].北京工业大学学报,2015(09):1326-1333.
[2]陈志猛,刘东权.基于对称性的快速车辆检测方法[J].计算机工程与设计,2012(03):1042-1046.
[3]丁伟利,李勇,王文锋等.基于图像的对称性识别算法研究[J].电子科技,2014(10):1-5.
10.16640/j.cnki.37-1222/t.2016.14.263