机械手采摘黄瓜的振动研究
2016-09-07方建军北方工业大学机械与材料工程学院
李 敏,方建军北方工业大学机械与材料工程学院
机械手采摘黄瓜的振动研究
李敏,方建军
北方工业大学机械与材料工程学院
为了研究机械手采摘黄瓜后移动到采摘筐过程中黄瓜的振动情况,用proe建立采摘黄瓜机器人的简化三维模型,然后导入Adams仿真软件中将黄瓜进行柔性化处理,并且用不同的加速度和黄瓜质量进行仿真分析,最后通过选取10组不同的华南型黄瓜在一维数控滑台上进行实验,用WK10控制软件控制机械臂的加速度,并通过位移传感器记录黄瓜的振动情况。通过比较验证得出用Adams仿真软件可以较精确的反映黄瓜的振动情况。加速度是影响黄瓜的主要因素,且加速度越大黄瓜的振幅越大。
黄瓜采摘;振动;Adams仿真;一维数控滑台
1 绪论
黄瓜种植广泛,是人们日常生活中最常见的蔬菜之一,其采摘主要是靠人工采摘,采摘强度大、效率低、成本高。
2011年中国农业大学研发了我国第一台黄瓜采摘机器人[1]。目前国内对黄瓜采摘机器人的研究还处于不成熟阶段,纪超等研究了温室黄瓜采摘机器人系统研制及性能分析[2],冯青春等研究了黄瓜采摘机械臂的结构优化与运动分析[3],两人只研究了黄瓜采摘机器人的结构。李永强等研究了基于Adams的酿酒葡萄植株受迫振动的仿真研究[4],对机械手采摘黄瓜的振动仿真具有指导意义,但是酿酒葡萄与黄瓜在植株结构、栽培模式、个体参数及采摘的方式都存在很大差异,因此需要独立研究机械手采摘黄瓜的振动。
机械手采摘黄瓜后,由于机械手加速度的影响,黄瓜会发生振动,如果振动过大就会使黄瓜掉落,并且不能快速准确的放入采摘筐中,影响黄瓜的采摘效率,因此有必要研究机械手采摘黄瓜的振动特性。
在Adams仿真软件中进行机械手采摘黄瓜的振动仿真研究,然后通过实验验证,分析得出影响机械手采摘黄瓜振动的因素,为下一步做抑制机械手采摘黄瓜振动的控制研究提供参数。
2 机械手采摘黄瓜系统振动仿真
2.1建立机械手采摘黄瓜的三维模型
采摘黄瓜的机器人包括移动平台、控制显示器、图像识别系统、机械臂、末端执行器、采摘筐等机构[5],由于机械手采摘黄瓜的实际情况复杂,影响因素众多,本研究中只研究机械手采摘黄瓜移动过程中发生的振动,因此简化模型,将移动平台简化成一维数控滑台,将机械臂和末端执行器简化成在一维数控滑台上移动的机械手。在proe中建立机械手采摘黄瓜的三维模型,然后导入Ad⁃ams中[6]。
2.2Adams仿真模型的建立
在机械手采摘黄瓜系统中,机械手是刚性体,黄瓜是柔性体,二者通过刚柔耦合相连接。在Adams中建立机械手采摘黄瓜的刚柔耦合模型[7],进行机械手从摘取到放入采摘筐过程中黄瓜振动的运动及动力学仿真,研究分析影响黄瓜振动的因素[8]。
在Adams中将黄瓜柔性化有三种方式:第一,将黄瓜离散成几段刚体,然后刚体间用柔性连接;第二,在Adams/View中直接用AutoFlex模块将黄瓜进行网格划分;第三,在有限元软件中将黄瓜进行网格划分,生成模态中性文件,然后导入Adams中建立黄瓜的柔性体。本研究采用第二种方法即可很好的反映黄瓜振动的特性,因此在Adams/View中直接用AutoFlex模块将黄瓜进行网格划分建立其柔性模型[9]。
添加约束和驱动建立机械手采摘黄瓜的刚柔耦合模型[10]。滑台与地面之间添加固定副,机械臂与滑台之间添加移动副,黄瓜与机械臂之间采用固定连接Fixed连接,最后用AutoFlex模块将黄瓜进行网格划分,完成机械手采摘黄瓜的刚柔耦合建模。在机械臂与滑台之间的移动副上添加驱动。
2.3Adams仿真结果与分析
if(time-0.5:step(time,0,0,0.5,500),500,step(time,0.5,500,1,0))
if(time-0.5:step(time,0,0,0.5,1000),1000,step(time,0.5,1000,1,0))
if(time-0.5:step(time,0,0,0.5,1500),1500,step(time,0.5,1500,1,0))
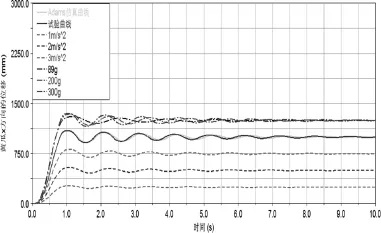
其仿真结果如下图:
由图分析知,黄瓜在机械臂移动的过程中受加速度的影响,且加速度越大黄瓜振动的振幅越大。
取三组黄瓜质量为89g、200g、300g的数据进行仿真,加速度都为,其仿真结果如下图:
由图分析知,黄瓜的质量对黄瓜的振动影响较小。
综上分析知,机械臂的加速度是影响黄瓜振动的主要因素,且加速度越大振幅越大。
3 实验验证
3.1黄瓜的相关参数
选取10根几何形状不同的华南型黄瓜,测量黄瓜的质量、长度,利用实验室的设备测量黄瓜的弹性模量为25.4MPa[11],泊松比为0.4。
3.2实验设备
本文主要研究机械臂采摘黄瓜后移动放入采摘筐过程时黄瓜的振动情况,因此简化采摘黄瓜机器人,采用一维数控滑台进行研究。滑台长1500mm,用86步进电机带动滚珠丝杠转动,机械臂随滚珠丝杠的转动在滑台上移动。电脑通过USB数据线连接WK10运动控制器在电脑上通过WK10的操作界面控制86电机的转速,从而可以控制机械臂移动的速度和加速度。在黄瓜上放置贴片式位移传感器记录黄瓜的振动情况[12]。
将实验结果与Adams仿真结果相比较,如上图所示,由上图分析比较知Adams仿真和实验结果分析得出的黄瓜的振动趋势、振幅及减振时长大致相同。
4 总结
通过Adams仿真和实验结果数据分析得出用Adams仿真软件进行黄瓜的振动分析可以较准确的得出黄瓜振动的趋势、振幅以及减振时长。加速度是影响黄瓜振动的主要因素,且加速度越大黄瓜的振幅也越大,以后可以用Adams进行这方面的研究分析,这样可以减少建模的时间以及实验成本,此外研究得出的数据为下一步做抑制机械手采摘黄瓜振动的控制研究提供参考。实验简化了黄瓜采摘机器人和采摘的环境,由于黄瓜采摘机器人结构的复杂性以及采摘环境也会影响黄瓜的振动情况,因此还需完善理论模型且在实际的黄瓜采摘环境中进行分析研究。
[1]刘长林,张铁中,杨丽.果蔬采摘机器人研究进展[J].安徽农业科学.2008,36(13):5394-5397
[2]纪超,冯青春,袁挺,等.温室黄瓜采摘机器人系统研制及性能分析[J].机器人.2011(06):726-730
[3]冯青春,纪超,张俊雄,等.黄瓜采摘机械臂结构优化与运动分析[J].农业机械学报.2010(41增刊):244-248.
[4]李永强,杨学军,王俊,等.基于Adams的酿酒葡萄植株受迫振动仿真研究[J].安徽农业科学.2015,43(27):220-224
[5]葛宜元,吴庆越,李瞳,等.黄瓜采摘机械手系统研究[M].农机使用与维修.2016(01).
[6]霍鹏飞,杨洁明,任锡义,等.基于PRO/E和ADAMS的直线振动筛动力学仿真[M].煤矿机电.2010(03):14-16
[7]陈立平等编著.机械系统动力学分析及ADAMS应用教程[M].清华大学出版社,2005
[8]李军等编.ADAMS实例教程[M].北京理工大学出版社,2002
[9]张爱莲,陈书剑.ADAMS柔性体建模技术研究[J].煤矿机械.2011,32(6):95-97
[10]石珍强,徐培民.ADAMS刚柔耦合多体系统动力学建模[J].安徽工业大学学报.2007,24(01):43-45
[11]任述光,吴明亮,谢方平,等.油菜茎秆弹性模量的测定[J].实验室研究与探索.2015,34(1):38-41
[12]姚天曙,丁为民.机械手采摘黄瓜的振动特性试验[J].农业工程学报.2006,22(9):250-253
李敏(1991-),男,硕士研究生,主要研究方向为助老助残家庭服务型机器人。
