综合PNT体系及其关键技术
2016-09-06杨元喜
杨元喜
西安测绘研究所地理空间工程国家重点实验室,陕西 西安 710054
综合PNT体系及其关键技术
杨元喜
西安测绘研究所地理空间工程国家重点实验室,陕西 西安 710054
综合定位、导航与授时(PNT)的核心是不过分依赖GNNS,采用一切可以应用的PNT信息源实施全空域目标定位、导航与授时服务。本文分析了综合PNT需求,论述了综合PNT的基本定义和基本概念,分析了综合PNT所涉及的信息源,论述了综合PNT关联的核心技术,包括多源PNT传感器集成技术、多源PNT的数据融合技术。强调指出,综合PNT体系的信息源必须是“基于不同物理原理的多源信息”;综合PNT的运控系统应该基于云平台,实现用户志愿者共同测控;用户终端或传感器必须“深度集成、低功耗”;PNT服务信息必须是“智能融合或自适应融合”。综合PNT系统应该在统一时空基准下,满足服务的可用性、精确性、可靠性、连续性和稳健性。
综合PNT;多源信息;传感器集成;自适应数据融合;稳健性
卫星导航定位系统的发展彻底改变了人们的生活方式;改变了部队的作战样式,尤其是改变了战场感知样式;也改变了政府的多种管理模式,特别是交通管理的样式。中国建成的区域北斗卫星导航系统(BDS)也在中国交通管理、应急指挥、海洋渔业及国防建设中发挥了重要作用。但是BDS与美国的GPS、俄国的GLONASS和欧盟Galileo系统一样都具有天然的脆弱性。即信号弱、穿透能力差、易受干扰。
卫星导航系统(GNSS)一般由3部分组成:空间段、地面段和用户段。首先,空间段卫星的安全稳定运行存在隐患,卫星本身和卫星的重要载荷可能出现故障;其次GNSS卫星信号非常微弱,极易受到干扰和欺骗,影响国防、电力、金融等核心用户群;另外卫星的星历一般靠地面跟踪站和运控系统提供,地面运控系统一旦崩溃,GNSS的PNT服务将无法保障;最后GNSS的PNT服务不能惠及地下、水下和室内,在高楼林立的大城市和森林密集的特殊地区,由于GNSS信息易受遮挡,也无法保证PNT服务的可用性、连续性和可靠性。
早在2010年,美国交通部和国防部就开始谋划美国国家综合PNT架构[1],拟在2025年前,构建国家PNT新体系。该PNT系统能够提供能力更强、效率更高的PNT服务。美国把PNT作为美国经济和国家安全依赖的基础设施。美国发动的海湾战争和南联盟战争,已经将GPS PNT的作用发挥得淋漓尽致。然而,美国的决策者们也已经意识到美国的国防行动过分依赖GPS,于是,他们又开始担心GPS PNT的脆弱性、安全性和稳健性,并策划构建新的PNT替代体系[2]。美国国防部和交通部联合40多家科研院校和企业,开始研发基于不同物理技术、不同原理和新计算理论的PNT体系[3]。
Parkinson教授2014年提出PTA概念[4],即保护(protect)、坚韧(toughen)和增强(augment),其核心是保护GPS的PNT信号不受攻击,并具有坚韧性。他提出采用星基和地基增强方法提升GNSS的PNT服务能力,提高可用性和完好性。Parkinson教授2015年进一步强调[5],在PNT应用的基础设施方面,美国要发展威胁GPS PNT的正规模型,并分别监测GPS和其他GNSS信号的完好性。
美国另外的一些学者则强调:发展以GPS为核心的,并包容其他手段的PNT体系。包括微型定位导航与授时技术(micro PNT),量子感知PNT技术以及其他有望提升物理场感知灵敏度和精度的传感器技术,高稳定和高可靠性原子时钟技术等[3]。
本文试图从综合PNT的基本概念、基本信息源和核心关联技术入手,描述未来综合PNT的发展,以便为综合PNT的体系建设、设备研制和技术发展提供参考。
1 综合PNT基本概念
所谓“综合PNT”至今并无统一定义,依作者的观点,“综合PNT”首先是多信息源的PNT(multi PNT signal source),其次是非中心化或云端化运控(云平台控制体系)的PNT,第三是多传感器组件深度集成的PNT(integration of multi PNT sensors),最后是多组件多源信息在不同用户终端深度融合的PNT(fusion of multi PNT dada)。所以综合PNT最终体现在用户PNT服务性能的提升。换言之,“综合PNT”必须包含几个核心性能要素:即必须满足可用性(availability)、完好性(integrity)、连续性(continuity)和可靠性(reliability)。此外,还应加上稳健性(robustness)。如此,可给出如下“综合PNT”定义。
综合PNT定义:基于不同原理的多种PNT信息源,经过云平台控制、多传感器的高度集成和多源数据融合,生成时空基准统一的,且具有抗干扰、防欺骗、稳健、可用、连续、可靠的PNT服务信息。综合PNT概念框图见图1。
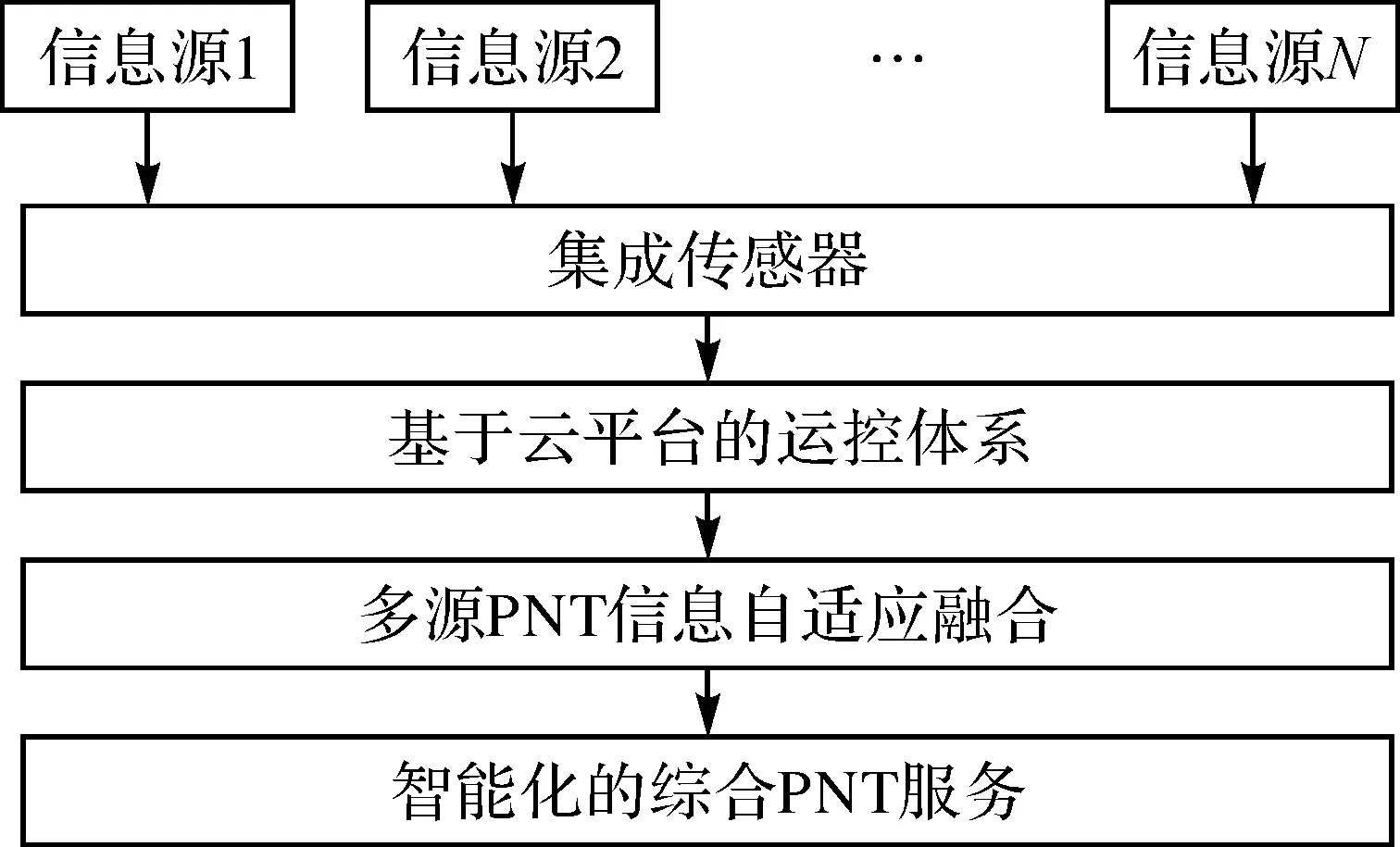
图1 综合PNT信息流程图Fig.1 Information flow diagram of comprehensive PNT
上述定义实际上也包含通常GNSS PNT服务的兼容与操作性[6]。
实际上,“综合PNT”具有“混合”和“自主”的属性,有人称为“混合自主PNT”(Hybrid and Autonomous PNT System),简称HAPS[2]。混合自主PNT也强调基于不同原理的多类PNT信息源,多种技术和多种功能的PNT传感集成,多类信息的融合服务。混合自主PNT强调协同、组合、集成、融合,以致多系统组合提供的PNT服务比单一系统的PNT服务更具有可用性、连续性和可靠性。如多类GNSS融合导航、GNSS/无线电通信组合、GNSS/重力匹配/INS组合等都属于这类综合PNT服务体系。
自主PNT系统(autonomous system)包含两个含义:一是某单一PNT系统无须其他外部系统支持,可自主完成或维持PNT服务;如基于星间链路的卫星自主定轨、测时所维持的GNSS PNT服务,惯性导航提供的PN(定位与导航)服务等;二是某一系统与其他功能组件进行紧组合实现体系的自主PNT服务,以补充单一系统PNT服务的保真性(fidelity)和稳健性(robustness)[2]。通常采用的GNSS/INS紧组合导航即属于这类自主综合PNT。
定义“综合PNT”不难,而搭建国家综合PNT系统、提供综合PNT服务则相对困难。首先,PNT的服务用户需求各不相同,如高安全用户需求抗干扰、防欺骗,并要求具有水下、地下PNT服务功能;普通用户要求具有室内外一体化PNT服务能力;交通运输用户要求具有高动态、连续且不受障碍遮挡影响的PNT服务;特殊群体还需要PNT服务可穿戴、小型化、低功耗、智能化等。
显然,综合PNT体系构建必然涉及服务终端的高度集成化、小型化甚至微型化(如芯片集成),而且综合PNT体系还涉及智能化的信息融合。
2 综合的PNT信息源
为了满足稳健可用性、稳健连续性和高可靠性,综合PNT必须具有基于不同原理的冗余信息源。之所以强调“不同原理”,是因为基于相同原理的信息一旦受干扰、遮蔽,再多的信息源也无济于事。
(1) 天基无线电PNT信息。天基无线电PNT信息仍然是未来综合PNT的主要信息源。中国的综合PNT系统必须以中国北斗卫星导航系统(BDS)为核心,兼容美国GPS、俄罗斯的GLONASS、欧盟Galileo和其他区域卫星导航系统,这种综合系统有人称之为GPSS(global PNT system of system)[2]。这些高轨GNSS信号必须满足兼容与互操作[7],否则综合PNT服务将会产生混乱。
为了提升GNSS的服务能力,尤其是提升飞机安全飞行与降落安全性,多个发达国家分别建立了星基增强系统(SBAS),美国称之为广域增强系统(WAAS),欧盟称之为EGNOS,俄罗斯称为SDCM,日本称为MSAS,印度称为GAGAN等;为了精密测量和局部增强,多国建立了地基增强系统(GBAS)。
此外,为了增强天基PNT,也有人提出利用低成本低轨卫星和通信卫星作为天基GNSS信号的补充和增强。首先低轨卫星和各类通信卫星轨道较低,信号功率相对较强,一般不易受到干扰(刻意干扰除外),而且低轨卫星和通信卫星参与PNT服务可极大增加用户可视卫星个数,增强用户卫星观测的几何结构,而且信号强度也得到提升,于是有利于提升天基PNT服务性能。高低轨卫星集成PNT示意图见图2。
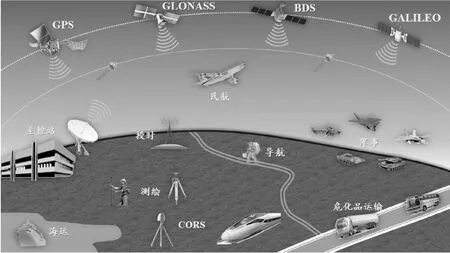
图2 高轨与低轨卫星集成PNT示意图Fig.2 Sketch mapon synthetic PNT with high and low orbit satellites
但必须注意:即使天空布满各类PNT卫星,但当信号被遮挡(如地下、水下、室内)时,这类天基PNT服务必将中断。且天基PNT服务易受故意干扰或者欺骗,不能确保PNT服务的安全性。此外,这类天基PNT服务需要地面运控系统的支持,一旦地面运控系统受损,天基PNT服务即可能受到严重影响。
(2) 地基无线电PNT信息源。地基PNT包括地基增强GNSS,伪卫星系统,以及其他多种地基无线电PNT服务体系。实际上,在GPS之前各国就发展了多种地基无线电导航定位技术,如多普勒导航雷达系统(Doppler navigation radar)、罗兰系统(ROLAN)、塔康系统(TACAN)、奥米伽(Omega)甚低频无线电系统、伏尔(VOR)甚高频系统、阿尔法(Alpha)系统等[8]。这些地基无线电导航系统作用范围小,不易实现全球无缝PNT服务。但可以作为区域PNT服务的补充。近年来快速发展的移动通信和无线网络系统可以作为新型地基PNT的重要信息源。此外,可以基于地基无线电网络体系构建PNT云(PNT Cloud)服务系统,类似于云计算。所有志愿者都可以在定位、导航和时间服务平台上提供各端点信息,通过云平台计算使端点用户获得网络PNT信息服务。
(3) 惯性导航信息源。惯性导航系统(inertial navigation system,INS)是机电光学和力学导航系统。INS具有自主性强的优点,与外界无须光电交换即可依赖自主设备完成航位推算。INS的微机电系统MEMS具有成本低、易集成的特点。INS系统可以提供载体的位置、速度和加速度信息,适于水下、地下、深空等无线电信号不易到达区域的导航定位。
但是,INS一般不能提供高精度时间信息,误差积累较为明显。而高精度INS价格昂贵。所以INS一般需要与其他PNT信息源进行集成和融合,首先需要集成高精度时间信息源,其次需要高精度外部位置信息进行累积误差纠正。
(4) 匹配导航信息源。匹配导航信息源一般先将具有统一地理坐标特征的信息进行存储,然后通过各类传感器获取相应特征信息,再与预先测量并储存的信息进行匹配,进而获得位置信息。这类匹配PNT信息源主要有影像匹配、重力场匹配、地磁场匹配。这类匹配导航信息适于水下、井下和室内导航定位。导航定位精度取决于预先测量信息的空间分辨率和绝对位置精度,也取决于载体传感器的实时感知精度,其中地磁场信息过于敏感,任何物理环境的扰动都会引起地磁场信息的较大变化。此外,匹配导航一般不提供时间服务,于是也需要与时间信息源集成,并与其他PNT信息源进行融合。
(5) 其他PNT信息源。光电天文观测信息、银河系外的脉冲星信号、激光导航信息、水下声呐信标等都可以作为综合PNT信息源。
3 综合PNT体系实现的关键技术
3.1综合PNT服务终端技术
随着PNT信息源的增加,必然给用户PNT服务终端研发带来挑战。未来的综合PNT服务终端应实现芯片化集成,才能实现小型化和低功耗;应包含无线电导航、惯性导航组件和微型原子钟组件等微型装置,且无系统间偏差,满足互操作等特性。
目前,最易实现的是将芯片级原子钟、微电子机械系统(micro-electro-mechanical systems,MEMS)的惯性测量单元IMU(inertial measurement unit)和GNSS集成,或将IMU和芯片级原子钟嵌入到GNSS接收机,这方面研究很充分,并且有相应的产品,而且INS与GNSS的互补性强,是比较理想而且相对简单的综合PNT集成系统[2,9]。但是由于惯性导航的误差积累显著,在缺失GNSS信号的情况下,这类综合PNT的长期稳健服务仍然存在问题。
另一种PNT终端集成是各类匹配导航传感器、芯片化的原子钟与计算单元及MEMS IMU集成。注意到尽管影像、重力、磁力值所对应的位置信息本身精度不高,但它们没有明显的系统误差累积,而且这几类PNT信息一般不受外界无线电干扰,于是可以用于长距离航行的惯性导航误差纠正。此外,超稳微型原子钟单元可以为各类匹配导航、惯性导航提供同步时间信息。
综合PNT未来终端还可能包括脉冲星信息感知传感器、光学雷达传感器等。多源信息感知的敏感性、抗干扰性、稳定性是集成PNT传感器的关键。应该强调,未来综合PNT体系发展,首先必须解决小型或微型超稳时钟研制难题,为机动载体提供稳定可靠的时间服务;其次是发展超稳定、且累积误差小的惯性导航组件(如量子惯性导航器件)等,为长航时载体提供无须外部信息支持的定位、导航与授时服务;必须发展芯片化传感器的深度集成技术,而不是各类传感器的简单捆绑,如此才能满足小型化、便携式、低功耗、长航时PNT服务的需要。
3.2多源信息融合技术
“综合PNT”不是单一PNT信息的集成或者综合,而是多类信息的融合。多类信息由于空间基准不同,必须进行空间基准的归一化,中国综合PNT体系应该采用中国2000坐标基准[10-11];多信息融合必须基于统一的时间基准,尤其是对于高速运动的载体的PNT服务,统一时间基准尤为重要。中国的PNT必须以北斗卫星导航系统(BDS)为核心,于是应该采用中国北斗时间(BDT)作为时标[12],对其他信息源进行时间归算、时间同步和时间修正等,使用户的综合PNT对应同一时标。
多源PNT信息融合必须统一观测信息的函数模型。实际上基于不同背景、不同原理构建的PNT服务系统或PNT服务组件,其函数模型是不同的。各类观测信息中可能还含有各自对应的重要物理参数、几何参数和时变参数等信息。为了实现综合PNT服务,各类PNT观测信息的函数模型必须表示成相同的位置、速度和时间参数(即用户关注的PNT参数)。
函数模型的统一表达是深度PNT信息融合的基础。共同的函数模型还应包括各类PNT传感器或各类PNT信息源的系统偏差参数(或互操作参数)[13],如多个GNSS信息融合的频间偏差[14],惯导与GNSS组合的惯导累积误差等[15]。
多源PNT信息融合必须有合理优化的随机模型。不同类型的PNT观测信息具有不同的不确定度以及不同的误差分布。在多类PNT信息融合时,应实时或近实时地确定各类观测信息的方差或权重,可以采用方差分量估计或基于实际偏差量确定的随机模型[16-18]。
综合PNT信息处理必须采用合理高效的计算方法。多源信息并行计算是实现高效PNT信息融合的重要手段;如联邦滤波[19-21]。为了避免重复使用动力学模型信息,可采用动静滤波技术[22]。为了控制各观测异常对PNT参数的影响,可以采用抗差信息融合[23-24]。为了控制动力学模型异常对综合PNT参数估计影响,可以采用自适应Kalman滤波进行PNT信息融合[25-26]。多源PNT信息融合框图见图3。
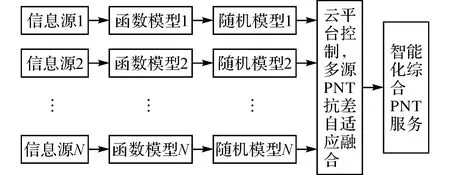
图3 多源PNT信息融合Fig.3 Information fusion of multiple PNT signal sources
多源PNT信息融合必须建立在信息兼容与互操作基础上,如此才能确保PNT结果的可互换(interchangeable)。融合后的PNT,不仅可用性和连续性得到提升,实际上,稳健性和可靠性也会得到显著增强。
这里需要强调指出:中国的综合PNT数据融合,应尽可能以BDS信息为核心,以BDS对应的坐标基准和时间基准为基础。此外,在综合PNT体系下,单一系统的完好性的重要性将显著减弱。因为综合PNT的信息源更丰富,多源信息的容错能力、误差补偿能力将得到增强[25],尤其是基于抗差估计原理的多源信息融合,将会提高综合PNT的抗差性(稳健性)。
4 结束语
综合PNT是未来定位导航和授时的发展方向。综合PNT首先是PNT信息的“多源化”,传感器的高度“集成化”和小型化,综合PNT时空基准“归一化”,运控手段的“云端化”,多源信息融合的“自适应化”,PNT融合数据的“稳健化”,最终实现PNT服务模式的“智能化”。由于综合PNT强调PNT原理的多样性与信息的冗余性,于是综合PNT的容错能力、系统误差的补偿能力、异常误差影响的控制能力、及抗差性(或稳健性)都会得到显著增强,进而可用性、完好性和可靠性都会得到提升,于是,一般意义上的单系统用户完好性要求将显著削弱。
综合PNT发展的核心技术包括:微型超稳时钟(芯片化原子钟)、超稳惯导器件或自主导航传感器、多源传感器的芯片化集成、多源PNT信息的自适应融合理论模型与快速计算方法等。
中国的综合PNT体系一定是以BDS PNT为核心的多源信息融合的PNT。
[1]Department of Transportation and Department of Defense of USA. National Positioning, Navigation, and Timing Architecture Implementation Plan[R].[S.l.]: Department of Transportation and Department of Defense of USA,2010.
[2]MCNEFF J. Changing the Game Changer—The Way Ahead for Military PNT[J]. Inside GNSS,2010, 5(8): 44-45.
[3]李耐和, 张永红, 席欢. 美正在开发的PNT新技术及几点认识[J].卫星应用, 2015(12): 34-37.
LI Naihe, ZHANG Yonghong, XI Huan. Some Cognition on the New PNT Technology under Designed by USA[J].Satellite Application, 2015(12): 34-37.
[4]PARKINSON B. Assured PNT for Our Future: PTA. Actions Necessary to Reduce Vulnerability and Ensure Availability[C]∥The 25th Anniversary GNSS History Special Supplement. [S.l.]: GPS World staff 2014.
[5]PARKINSON B. A PAT Program and Specific Challenges to PNT, Presentation talk in ICG 10[R].Boulder:[s.n.], 2015.
[6]杨元喜. 北斗卫星导航系统的进展、贡献与挑战[J].测绘学报, 2010, 39(1): 1-6.
YANG Yuanxi.Progress, Contribution and Challenges of Compass/BeiDou Satellite Navigation System[J]. Acta Geodaetica et Cartographica Sinica, 2010, 39(1): 1-6.
[7]杨元喜, 陆明泉, 韩春好. GNSS互操作若干问题[J].测绘学报, 2016, 45(3): 253-259.DOI: 10.11947/j.AGCS.2016.20150653.
YANG Yuanxi, LU Mingquan,HAN Chunhao. Some Notes on Interoperability of GNSS[J].Acta Geodaetica et Cartographica Sinica, 2016, 45(3): 253-259. DOI: 10.11947/j.AGCS.2016.20150653.
[8]吴德伟. 航空无线电导航系统[M].北京: 电子工业出版社, 2010.
WU Dewei. Radio Navigation Systems for Aviation[M].Beijing: Publishing House of Electronic Industry, 2010.
[9]吴富梅. GNSS/INS组合导航误差补偿与自适应滤波理论的拓展[D].郑州:信息工程大学, 2010.WU Fumei. Error Compensation and Extension of Adaptive Filtering Theory in GNSS/INS Integrated Navigation[D].Zhengzhou: Information Engineering University, 2010.
[10]魏子卿, 刘光明, 吴富梅. 2000中国大地坐标系: 中国大陆速度场[J].测绘学报, 2011, 40(4): 403-410.
WEI Ziqing, LIU Guangming,WU Fumei. China Geodetic Coordinate System 2000: Velocity Field in Mainland China[J].Acta Geodaetica et Cartographica Sinica, 2011, 40(4): 403-410.
[11]杨元喜. 2000中国大地坐标系[J].科学通报, 2009, 54(16): 2271-2276.
YANG Yuanxi.Chinese Geodetic Coordinate System 2000[J].Chinese Science Bulletin, 2009, 54(15): 2714-2721.
[12]HAN Chunhao, YANG Yuanxi,CAI Zhiwu. BeiDou Navigation Satellite System and Its Time Scales[J]. Metrologia, 2011, 48(4):S13.
[13]YANG Yuanxi, LI Jinlong, XU Junyi, et al. Generalised DOPs with Consideration of the Influence Function of Signal-in-space Errors[J].The Journal of Navigation, 2011, 64(S1):S3-S18.
[14]李敏. 多模GNSS融合精密定轨理论及其应用研究[D].武汉:武汉大学, 2011.LI Min. Research on Multi-GNSS Precise Orbit Determination Theory and Application[D]. Wuhan: Wuhan University,2011.
[15]吴富梅, 杨元喜. 基于高阶AR模型的陀螺随机漂移模型[J].测绘学报, 2007, 36(4): 389-394.WU Fumei,YANG Yuanxi.Gyroscope Random Drift Model Based on the Higher-order AR Model[J].Acta Geodaetica et Cartographica Sinica, 2007, 36(4): 389-394.
[16]杨元喜, 徐天河. 基于移动开窗法协方差估计和方差分量估计的自适应滤波[J].武汉大学学报(信息科学版), 2003, 28(6):714-718.
YANG Yuanxi,XU Tianhe. An Adaptive Kalman Filter Combining Variance Component Estimation with Covariance Matrix Estimation Based on Moving Window[J].Geomatics and Information Science of Wuhan University, 2003, 28(6): 714-718.
[17]YANG Yuanxi,XU Tianhe. An Adaptive Kalman Filter Based on Sage Windowing Weights and Variance Components[J].The Journal of Navigation, 2003, 56(2):231-240.
[18]杨元喜, 高为广. 基于多传感器观测信息抗差估计的自适应融合导航[J].武汉大学学报(信息科学版), 2004, 29(10): 885-888.
YANG Yuanxi,GAO Weiguang. Integrated Navigation Based on Robust Estimation Outputs of Multi-sensor Measurements and Adaptive Weights of Dynamic Model Information[J].Geomatics and Information Science of Wuhan University,2004, 29(10): 885-888.
[19]CARLSON NA. Federated Filter for Fault-Tolerant Integrated Navigation Systems[C]∥Proceedings of IEEE Position Location and Navigation Symposium.Orlando: IEEE, 1988: 110-119.
[20]CARLSON NA. Federated Filter for Computer-Efficient, Near-Optimal GPS Integration[C]∥Proceedings of IEEE Position Location and Navigation Symposium.Atlanta: IEEE, 1996: 306-314.
[21]YANG Yuanxi,CUI Xianqiang,GAO Weiguang. Adaptive Integrated Navigation for Multi-sensor Adjustment Outputs[J]. The Journal of Navigation, 2004, 57(2): 287-285.
[22]杨元喜. 多源传感器动、静态滤波融合导航[J].武汉大学学报(信息科学版), 2003, 28(4): 386-388, 396.
YANG Yuanxi.Kinematic and Static Filtering for Multi-Sensor Navigation Systems[J].Geomatics and Information Science of Wuhan University, 2003, 28(4): 386-388, 396.
[23]高为广, 杨元喜, 张双成. 基于当前加速度模型的抗差自适应Kalman滤波[J].测绘学报, 2006, 35(1): 15-18, 29.
GAO Weiguang, YANG Yuanxi, ZHANG Shuangcheng.Adaptive Robust Kalman Filtering Based on the Current Statistical Model[J].Acta Geodaetica et Cartographica Sinica, 2006, 35(1): 15-18, 29.
[24]杨元喜, 高为广. 基于多传感器观测信息抗差估计的自适应融合导航[J].武汉大学学报(信息科学版), 2004, 29(10): 885-888.YANG Yuanxi, GAO Weiguang.Integrated Navigation Based on Robust Estimation Outputs of Multi-sensor Measurements and Adaptive Weights of Dynamic Model Information[J].Geomatics and Information Science of Wuhan University, 2004, 29(10): 885-888.
[25]YANG Y, HE H, XU G. Adaptively Robust Filtering for Kinematic Geodetic Positioning[J].Journal of Geodesy, 2001, 75(2-3): 109-116.
[26]YANG Yuanxi, GAO Weiguang. An Optimal Adaptive Kalman Filter[J].Journal of Geodesy, 2006, 80(4): 177-183.
(责任编辑:张燕燕)
Concepts of Comprehensive PNT and Related Key Technologies
YANG Yuanxi
National Key Laboratory of Geo-Information Engineering, Xian Research Institute of Surveying and Mapping, Xi’an 710054, China
The core idea of comprehensive positioning, navigation and time (PNT) is the technique that uses all the available resources to provide PNT services in the whole area, including inside and outside door, air, space, under water and underground, which does not solely rely on the GNSS. The definition and basic concepts of the comprehensive PNT are presented. The possible signal sources are listed. The core technologies related to the comprehensive PNT are analyzed, including the integration of the multiple sensors and adaptive data fusion for multiple PNT signals. It is emphasized that the information of the comprehensive PNT should be from “multiple sources based on different physical principles”, the control system should be operated by voluntary users based on cloud platform, the user terminals or sensors should be “deeply integrated” and the PNT information should be “adaptively fused” and serve mode might be based on cloud platform. The comprehensive PNT system should meet the robust availability, continuity, high accuracy and reliability with unified geodetic datum and time datum.
comprehensive PNT; multiple signal source; integration of sensors; adaptive data fusion; robustness
2016-03-20
2016-03-26
杨元喜(1956—),男,博士,研究员,中国科学院院士,主要从事动态大地测量数据与卫星导航数据处理研究。
Author: YANG Yuanxi(1956—),male, PhD, professor, academician of Chinese Academy of Sciences, majors on dynamic geodetic data and satellite navigation data processing.
10.11947/j.AGCS.2016.20160127.
YANG Yuanxi.Concepts of Comprehensive PNT and Related Key Technologies[J]. Acta Geodaetica et Cartographica Sinica,2016,45(5):505-510. DOI:10.11947/j.AGCS.2016.20160127.
P228
A
1001-1595(2016)05-0505-06
引文格式:杨元喜.综合PNT体系及其关键技术[J].测绘学报,2016,45(5):505-510.