修井机用低速大转矩永磁电机直驱系统
2016-09-05张炳义刘博年冯桂宏丁宏龙
张炳义,刘博年,冯桂宏,丁宏龙
(沈阳工业大学 电气工程学院,沈阳 110870)
修井机用低速大转矩永磁电机直驱系统
张炳义,刘博年,冯桂宏,丁宏龙
(沈阳工业大学 电气工程学院,沈阳 110870)
传统油田修井机采用柴油机或异步电机驱动。柴油机驱动系统的工作效率低、能耗大、污染高。异步电机和减速箱组成的驱动系统的功率因数低、系统维护复杂、噪声大。永磁电机直驱系统具有结构简单,高效节能,系统维护简单,噪声低等优点,可以解决传统柴油机以及异步电机存在的问题。该系统还具有易于控制,运行稳定的优势。通过单星形与双串星形双绕组变换的方法实现电机的宽恒功率调速。采用特殊表贴式转子结构可以削弱电机转矩脉动。控制上采用闭环矢量控制来实现电机的平稳运行以及带载悬停等功能。
修井机;永磁电机;直驱;恒功率调速;闭环矢量控制
油田修井作业机主要是用于提升和下放油管及抽油杆,检测和维修抽油泵,进行井口设备的安装和起重辅助[1-2]。目前,我国的修井机驱动方式主要有2种:一种是车载柴油发动机驱动方式,另一种就是异步电机加减速箱驱动方式[3]。以柴油机为动力的传统修井机通过变速机构、角传动机构和卷筒减速机构驱动钢丝绳卷筒,以卷扬的方式实现修井作业功能[4-5]。柴油机在无电的情况下可以正常工作,但是空转时间比较长,移动速度慢,工作效率低、耗能大、污染高。随着全球性的能源价格上涨,以柴油机为动力的修井机的成本也不断提高[6]。以异步电机为动力的修井机,整机采用车载式电驱动、变速箱机械传动、交流变频调速系统,与柴油机相比效率有所提高,节能,环保,成本低。但是,与永磁电机相比效率和功率因数都比较低,耗电量较大,系统维护复杂,噪声大[7-12]。
永磁电机与异步电机相比具有结构简单、可靠性高、性能优异、易于控制、高效节能等优点,并且没有减速箱,电机直接驱动滚筒,可使维护难度及费用大幅降低。因此,本文采用低速大转矩永磁电机驱动修井机。
1 油田修井机用永磁电机直驱系统的关键问题
1.1载荷特性
本文基于胜利油田修井机工程实例进行永磁电机直驱系统的设计。修井机在提起抽油杆和油管时,由于石油的粘滞力等因素,修井机在提起前几根油管的时候需要提供更大的拉力。在工作一段时间后,由于阻力的减小,修井机就转为工作在轻载的阶段,而且修井机大部分时间都是工作在轻载阶段,为了保证轻载阶段工作的效率,需要将电机的转速提高。
电机在提起重物的过程中需要稳定运行,不能发生抖动。提起和下放重物的过程很短,电机要对控制信号作出快速的响应。由于电机在吊起重物后不能够马上进行下放工作,所以电机要能够实现带载悬停。
胜利油田对修井机驱动电机在不同负载下要求的转速曲线如图1所示。
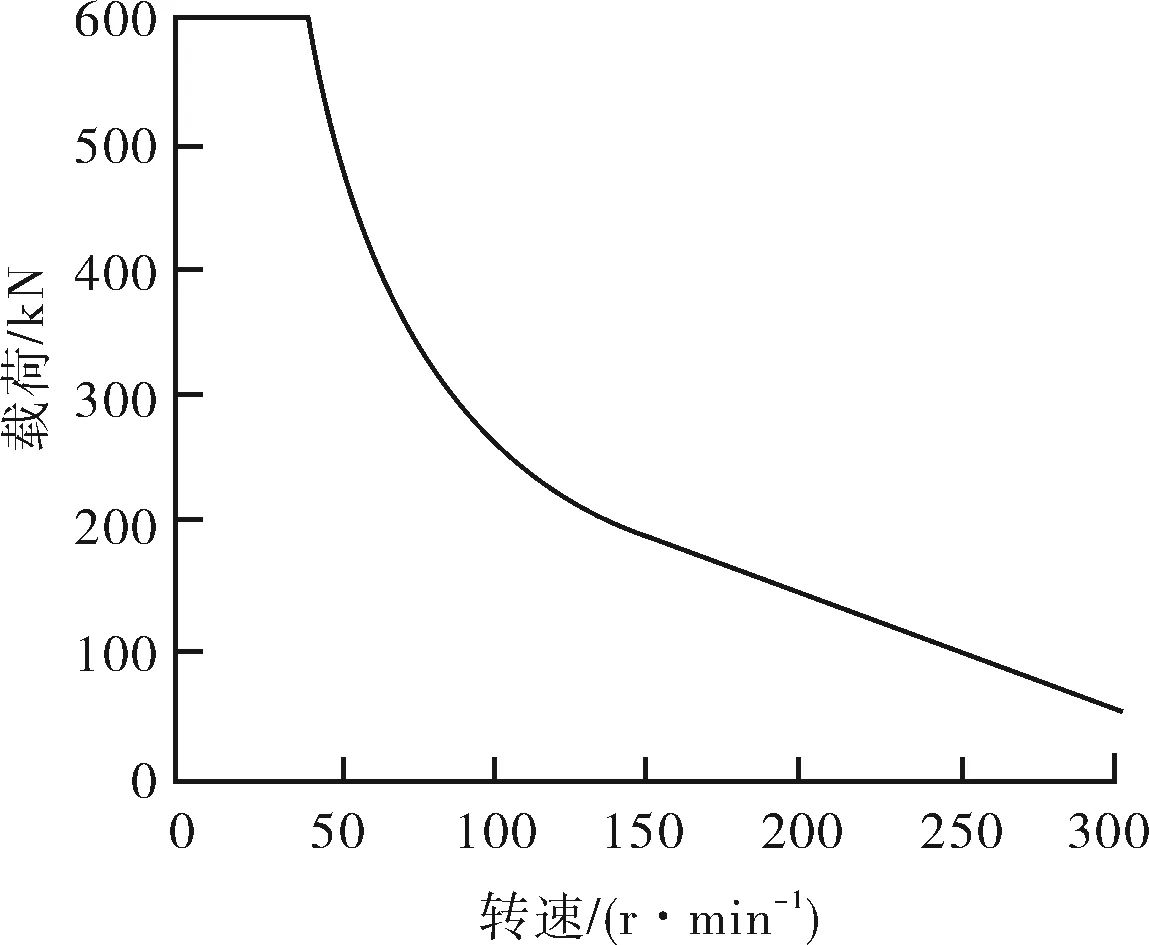
图1 修井机驱动电机载荷-转速曲线
根据修井机对驱动电机的要求,确定了永磁电机的额定参数,如表1所示。

表1 修井机驱动电机额定参数
1.2永磁电机的极槽配合
修井机用驱动电机需要实现低速大转矩。与异步电机不同,永磁电机可以采用多极结构来实现低速大转矩。多极结构下,如果采用整数槽绕组,必将导致定子槽数过多,这样会大幅加剧齿槽效应,从而导致转矩脉动的加强,影响电机低速的平稳性。而且,槽数过多必将导致定子齿宽度的减小,影响齿部饱和程度,进而影响电机性能。同时,由于槽数过多,会影响定子的机械强度。
永磁电机可以通过改变磁极形状来调整气隙磁场,因此,不同于异步机,永磁电机可以采用分数槽绕组。分数槽绕组能够减小特定次数的谐波,减小齿槽效应引起的转矩脉动,绕组跨距小,线圈端部长度可以缩短,易于下线和整形。根据修井机驱动电机的要求,本文设计的电机采用分数槽绕组,取极对数p=40,定子槽数Q=96,每极每相槽数q=0.4。
1.3永磁电机宽恒功率调速
修井机在重载工作时转速要求40 r/min。修井机大部分时间工作在轻载情况下,修井机的转速为128 r/min,在空钩的时候电机需要达到的最高速度为300 r/min。电机需要满足0 ~300 r/min的转速变化范围,同时还需要满足一定的转矩输出,保证重物能够被提起。在转速超过额定转速时与变频器配合进行弱磁扩速。但是永磁电机弱磁扩速的范围是有一定限制的,若想增加电机扩速的需求,同时满足转矩需求,就要增加电机的功率、电压等级以及变频器的容量,但是,现场对电机的功率以及电压等级要求是有一定限制的。因此,本文采用一台电机双绕组结构的方法来进行宽恒功率调速,不增加电机和变频器的功率实现转速的升高。
本文采取了单星形和串星形双绕组接法相切换实现电机的宽恒功率调速。分为两个挡位,轻载时将额定转速定在128 r/min,重载时将额定转速定在64 r/min。
本文在进行电机设计时,将并联支路数设计为a=4,从单元电机的角度来看,可以看成该电机是由4台单元电机来组成的。通过4条并联支路的不同组合实现绕组连接方式的改变。
串星形绕组接法如图2,单星形绕组接法如图3所示。
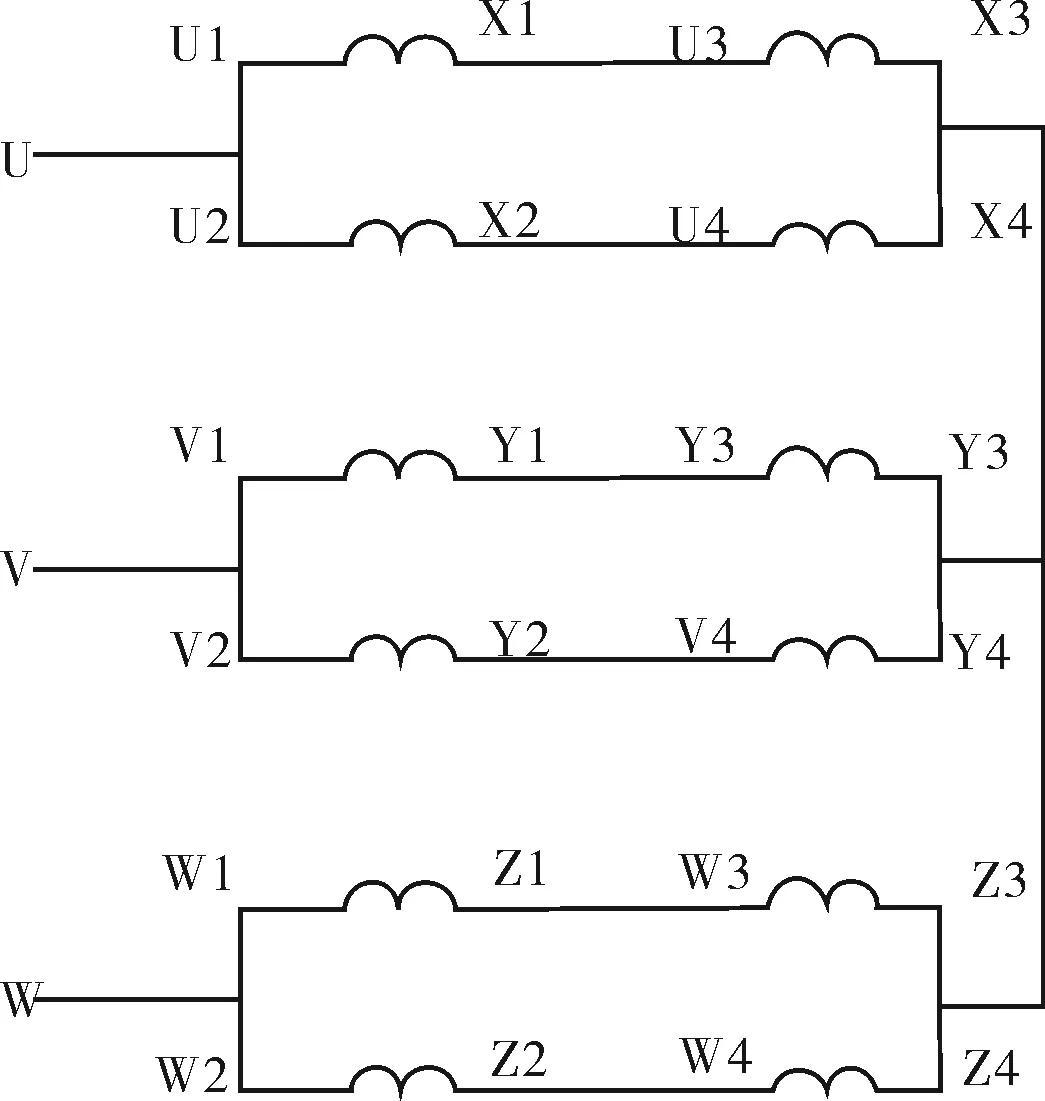
图2 串星形绕组接法

图3 单星形绕组接法
电机的绕组工程控制图如图4所示,PLC控制档位切换梯形图如图5所示。低速挡10.0闭合时,Q0.0得电,K1、K3、K5闭合,K2、K4断开,电机绕组连接方式为串星形,电机工作在低速挡。高速挡10.1闭合时,K2、K4闭合,K1、K3、K5断开时,电机绕组连接方式为单星形,电机工作在高速挡。

图4 电机绕组工程控制图

图5 挡位切换梯形图
所谓的串星形绕组,就是将两条支路先进行串联,再将串联的两条支路进行并联,如图2所示,此时的并联支路数a=2。单星形绕组的接法如图3所示。根据电机的空载反电势公式,当电机转速升高时,电机的反电势也会相应的增高,而变频器的容量是一定的,变频器所允许的电压和电流是一定的,电机的反电势升高是有一定的极限的,变频器需要增大电机的直轴去磁电流来减小磁密,从而减小反电势。直轴电流的增加会导致电机电流的增加,而变频器允许的电流值是有一定限制的,因此电机的转速升高就会受到限制。从图2~3可以看出电机串星形绕组的匝数是单星形绕组的2倍,根据电机反电势公式可以得出,在相同的转速情况下单星形绕组所产生的反电势是串星形绕组所产生的反电势的1/2。因此,单星形绕组可以将转速提高2倍,此时的反电势才与串星形绕组所产生的反电势相同,也就实现了电机的扩速。虽然这种做法会影响电机的转矩输出,但是由于电机在高速状态下是轻载运行,所以不会影响修井机正常工作。
1.4环流的避免
以A相为例,电机的4条并联支路在定子上是沿着圆周均匀分布的,如图6所示。
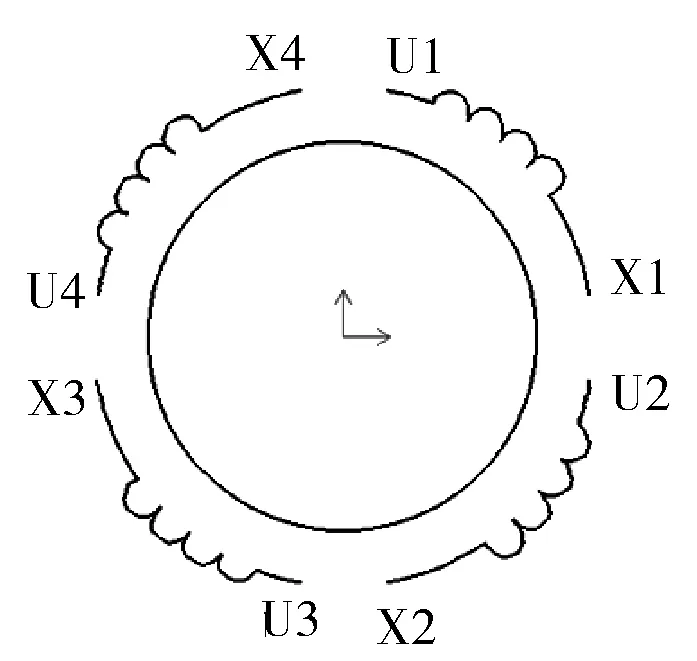
图6 A相绕组支路分布示意
电机在单星绕组连接时,实际上只是将电机的一半绕组接入电网,也就是说只有一半电机在工作。在选择工作绕组时,如果选择相邻的两条支路,由于电机只有一半绕组通电,另一半绕组不通电,这样电机在转动时就会受到单边磁拉力的影响而使转子偏心,影响电机运行的平稳性。为减小单边磁拉力的影响,在选取工作绕组时,选取相对的两条支路作为工作绕组,这样电机转子两边所受拉力对称,可以减小单边磁拉力的影响。连接方式如图3所示。
另外,电机在串星形绕组连接时,如果将相邻两条支路进行串联,再将串联的两条支路并联,由于制造时不能保证转子与定子严格的同心,以及电机加工上的其它偏差,会导致两条并联支路上的电势不是完全相等,这样在两条并联支路间就会产生环流。为了削弱环流的产生,在串星形接法时将电机相对的两条支路进行串联,再将两条支路并联,这样可以使两条并联支路对称度增加,减小环流作用。具体连接方法如图2所示。
2 永磁电机仿真分析
本文采用表贴式转子结构,永磁体磁钢表面的弧度与转子圆心偏心,构成不均匀气隙,由于磁钢两边厚度较小而中间的厚度较大,导致磁钢中间的磁场强于磁钢两边的磁场,这样就会使气隙磁密波形更加接近正弦波,减小气隙磁密的谐波含量,减小电机的转矩脉动,使电机性能更加稳定。
本文通过ANSOFT有限元软件对所设计的电机进行仿真,分析电机的性能参数。
电机的空载反电势波形如图7所示。
从电机的反电势波形可以看出,由于磁钢两边的厚度偏小而中间厚度偏大,空载反电势受气隙磁密波形的影响,其波形正弦度很好,并无明显的畸变,电机的平稳性更好。
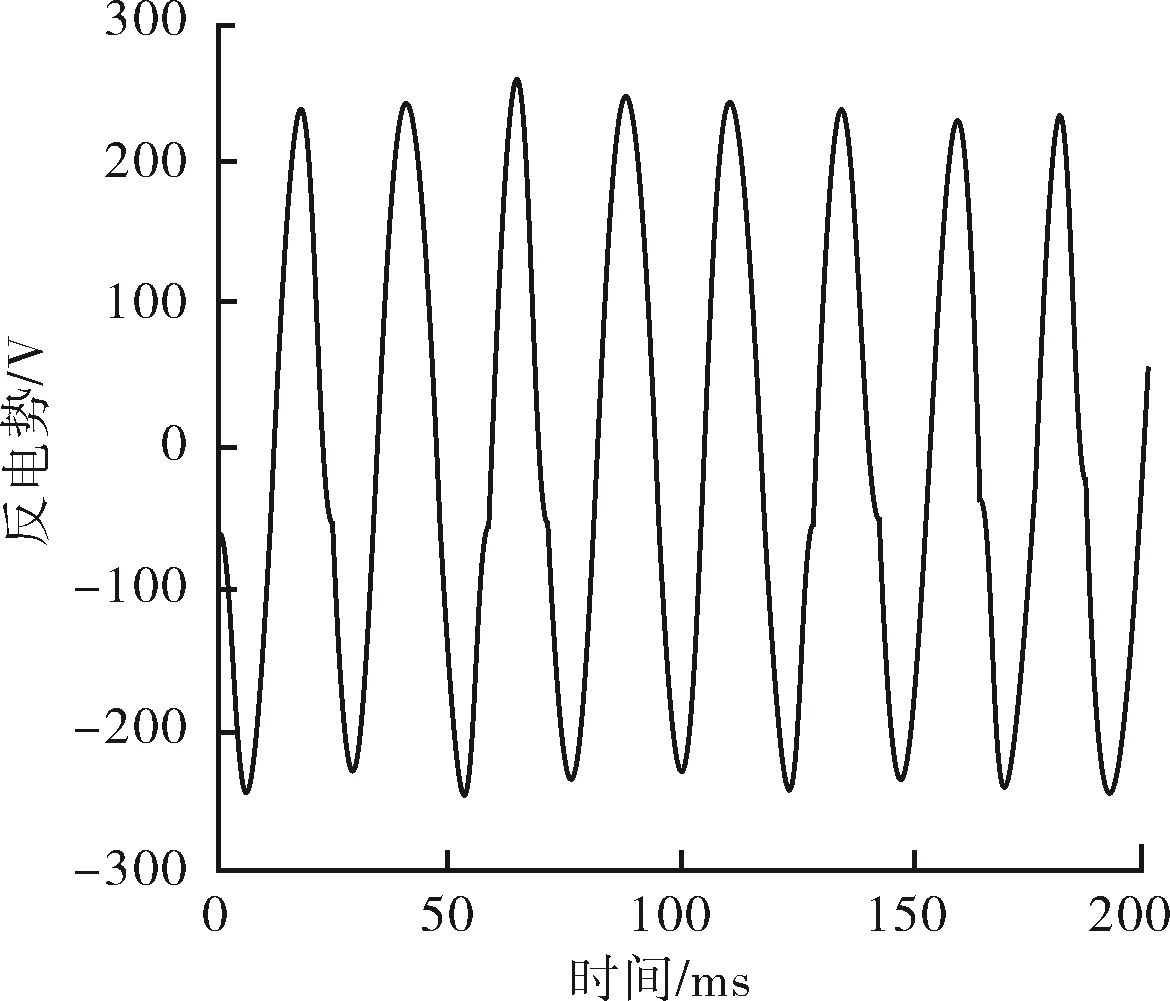
图7 电机的空载反电势波形
使用Matlab软件对常规表贴式转子结构以及本文所采用的表贴式转子结构的电机气隙磁密波形进行傅里叶分解,得到了两种转子结构的气隙磁密谐波所占百分比对比图,如图8所示。
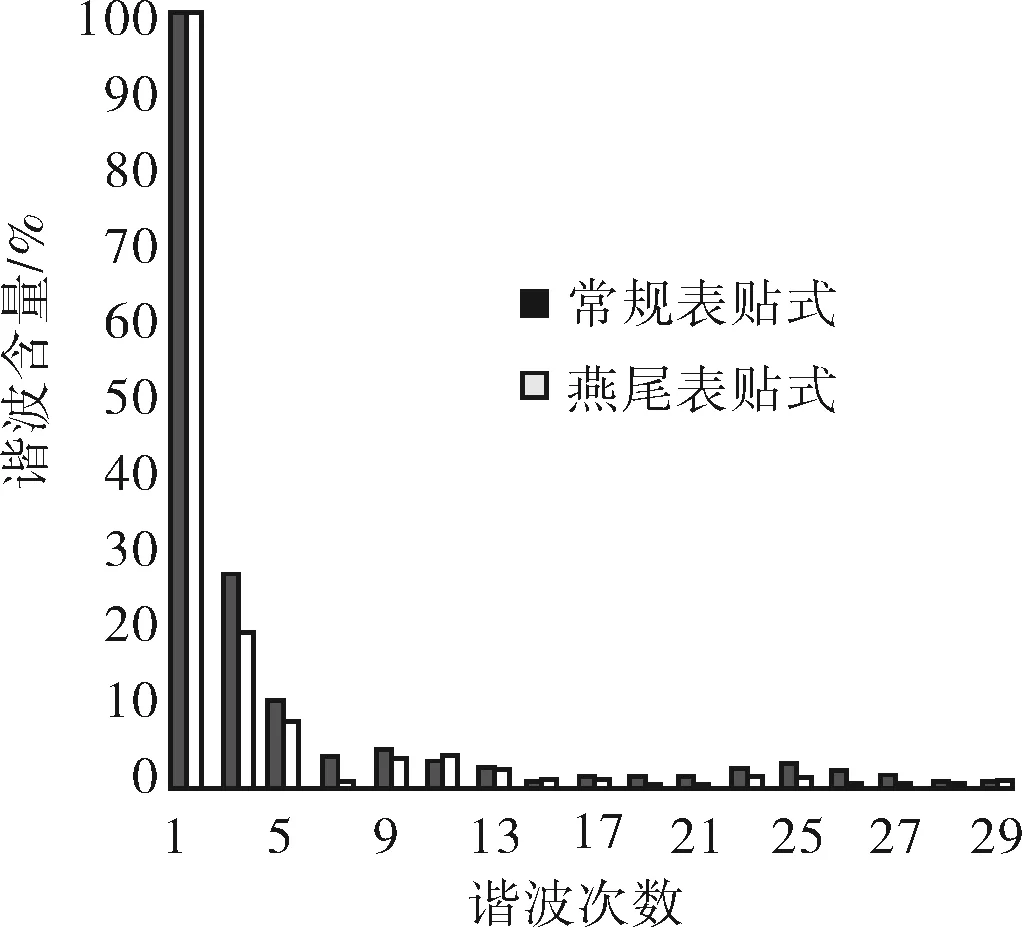
图8 气隙磁密谐波百分比
对两种结构的空载反电势进行傅里叶分解得到图9,可以从图中看出,本文采用的表贴式转子结构产生的反电势谐波含量相比于普通表贴式转子结构产生的反电势谐波含量有所减少,谐波含量减少一方面可以减小电机的转矩脉动,另一方面也能够减少电机永磁体上的涡流损耗。
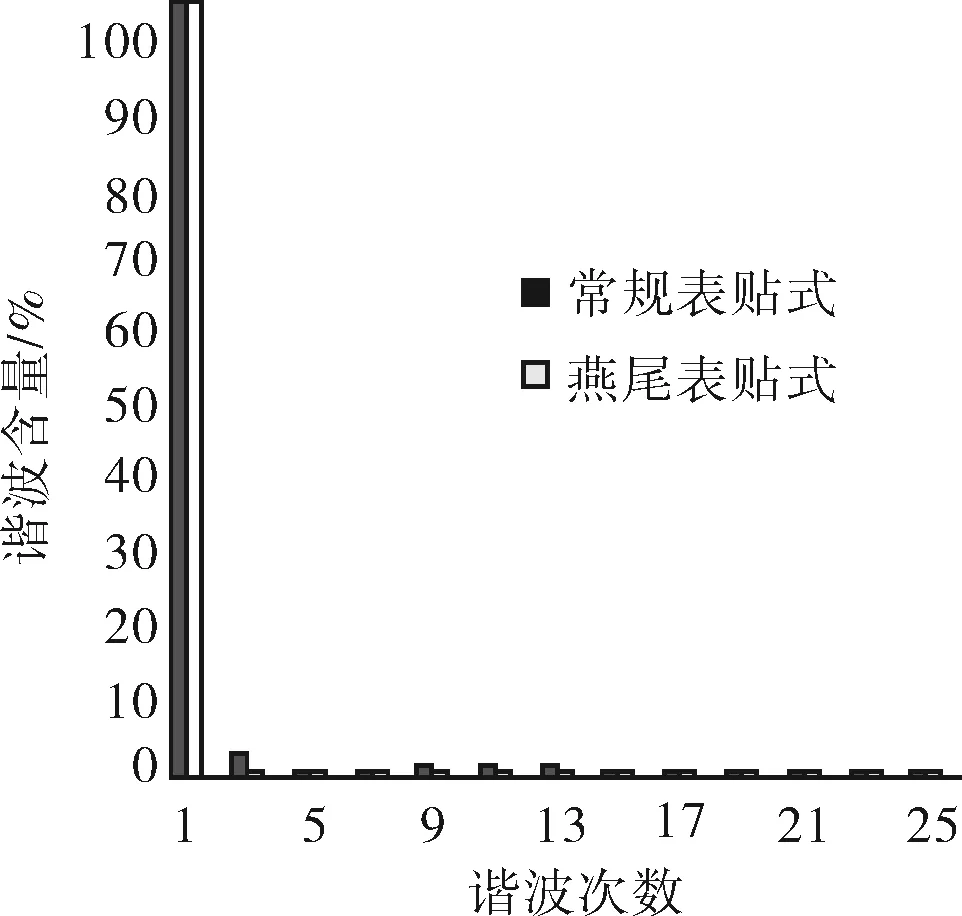
图9 空载反电势谐波百分比
从图8中可以很清晰地看出,本文采用的转子结构的气隙磁密谐波含量明显小于常规表贴式转子结构的气隙磁密谐波含量。
3 闭环矢量控制以及带载悬停的实现
修井机工作时驱动电机需要平稳的运行,不可以产生抖动。传统修井机在将重物吊起后需要使用机械抱闸来保证重物的悬停,由于修井机是在转动的状态下被机械抱闸抱死,因此,会影响机械抱闸的使用寿命。
本文采用汇川变频器来对电机进行控制,控制方式采用闭环矢量控制,电机工作在额定转速范围内时采用的是id=0的控制方式,单位电流产生最大转矩,当电机转速超过额定转速时采用的是弱磁控制,增大直轴去磁电流,保证电压的平衡,达到扩速的目的。
当变频器频率为0时,变频器会对相绕组输入直流电,使电机产生转矩来克服重物的重力,实现电机带载悬停,然后再用机械抱闸抱死,这样可以增加机械抱闸的使用寿命。
永磁电机控制电路图如图10所示。
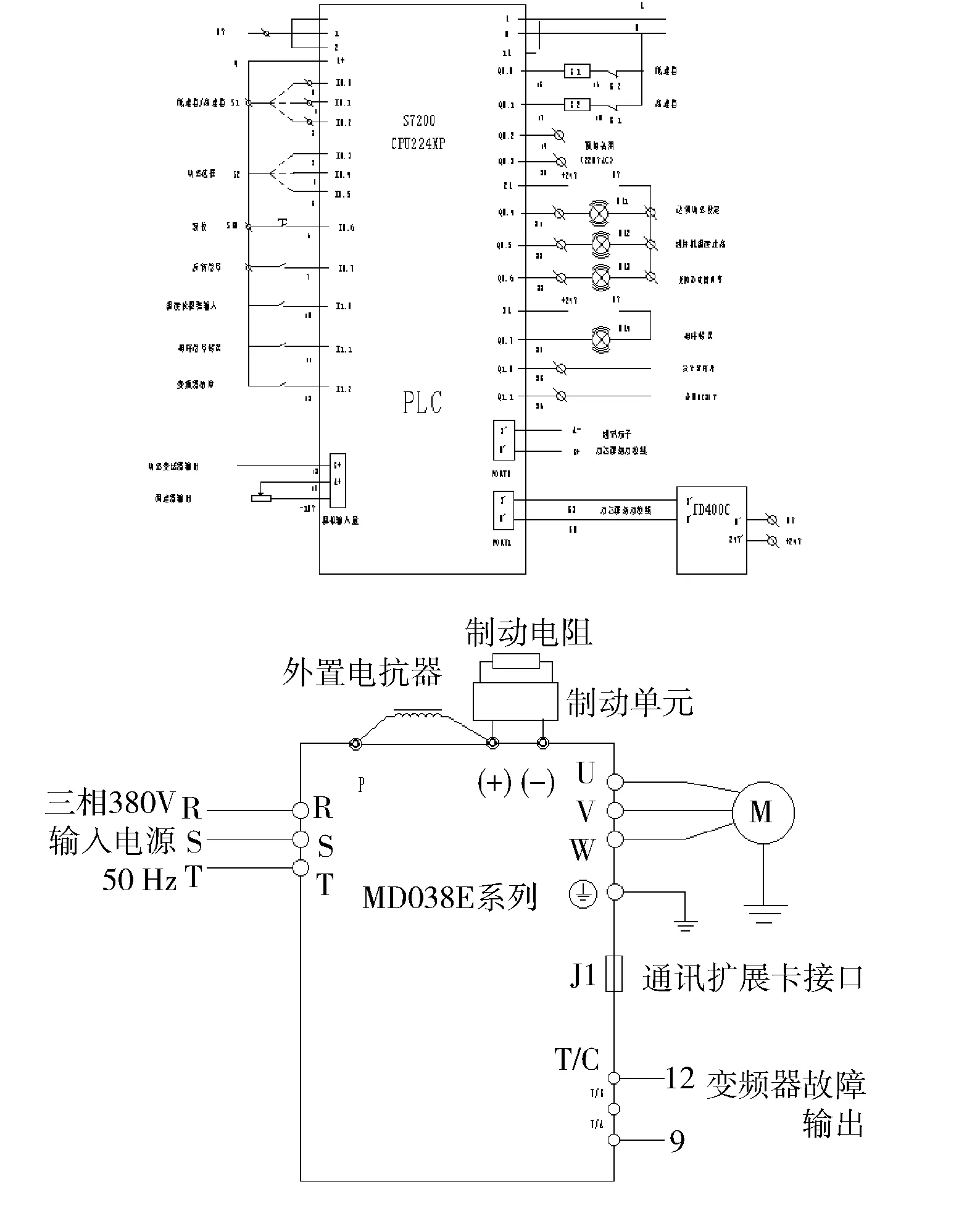
图10 永磁电机控制电路图
工作人员通过手柄来调节电机的转速,手柄的信号输入到PLC,PLC进而改变变频器的输出频率等参数进而改变电机的转速。永磁电机中装有编码器,反馈电机的参数给变频器,进行闭环控制。
4 样机试验研究
修井机用永磁电机的样机已经在胜利油田进行试验,图11是油田修井机低速大转矩永磁电机的实物图。图12是修井机控制柜实物图。

图11 永磁电机实物图

图12 控制柜实物图
试验时,采用不同质量的配重块来模拟修井机在油田工作时的不同负载。根据油田修井机的实际工作状况,采用短时反复工作制,测量电机的实际转速,工作电流,以及温升情况。
电机的理论转矩特性曲线如图13所示,电机的实际转矩特性曲线如图14所示。
负载实际上就是大钩所提升配重块的质量。在高速挡的工作状态下,电机可以满足修井机的实际要求,在指定的负载下达到所要求的速度。电机额定电流180 A,工作时电机电流在200 A左右,最高为206 A,在合理范围之内。在环境温度28 ℃,长时间运行的过程中,电机的温度没有超过60 ℃。与变频器相配合,电机在整个运行过程中并无抖动现象,运行平稳,可以实现带载悬停,因此电机在高速挡是可以正常稳定工作的。
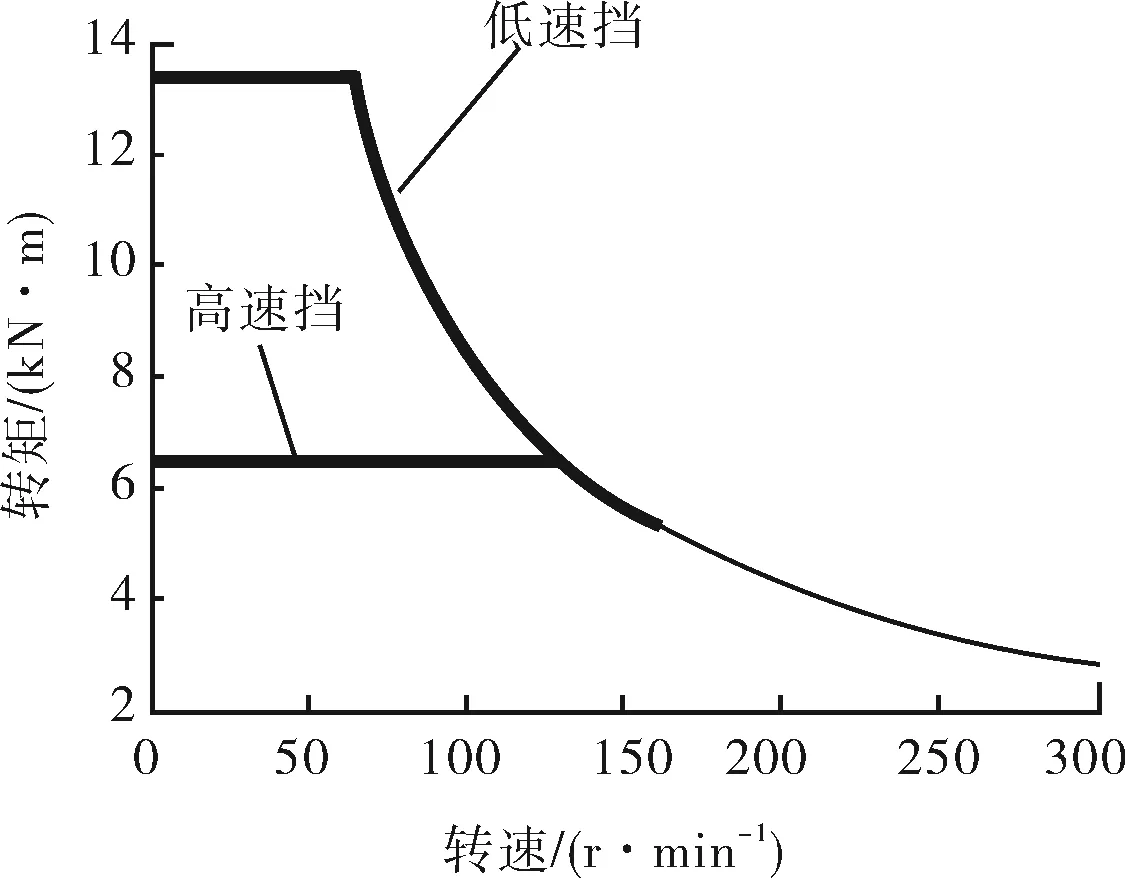
图13 电机理论转矩特性曲线
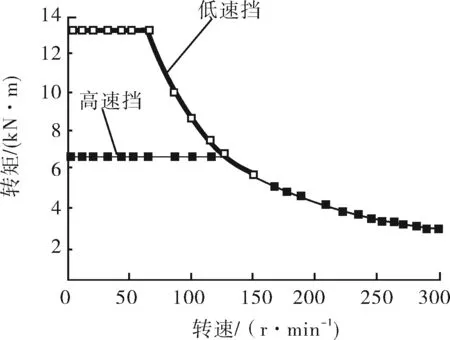
图14 电机实际转矩特性曲线
在实际工作中,电机带动600 kN负载是极其少有的情况,电机的重载情况主要是300 kN以及400 kN负载,此时电机工作在低速挡状态。而且,修井机工作在重载的时间很短,所以只是进行了短时间的带载试验。经过试验,电机可以输出足够的转矩,并能够满足一定的转速。额定电流为180 A,电机在负载600 kN时电流达到214 A,在300 kN以及400 kN负载时电流为208 A和210 A,由于重载工作时间较短,所以该电流是可以接受的。在环境温度为28 ℃,短时间工作的情况下,电机的温升可以稳定在60 ℃左右。电机在整个运行过程中并没有抖动的情况发生,可以平稳地进行工作。
5 结论
1)本文通过对油田修井机低速大转矩永磁电机直驱系统的设计、仿真分析以及现场试验,认为该系统可以很好地替代传统的修井机驱动系统。
2)采用多极结构,分数槽绕组,能够满足电机的转矩要求,使电机稳定的运行。
3)采用单星与串星相结合的绕组结构,实现了扩展电机的恒功率调速范围,使电机可以达到更高的转速,电机的电流得到了很好地控制,在运行中保持在合理的范围之内。
4)通过绕组对称连接方式,削弱了环流以及单边磁拉力的影响。
5)将磁钢加工成特殊形状,采用不均匀气隙,通过有限元软件进行仿真分析,空载反电势波形正弦度好,与传统表贴式相比,气隙磁密以及反电势谐波有明显减少,可以使电机稳定运行。
6)采用变频器对电机进行闭环矢量控制,电机运行平稳,响应速度快。不需要机械抱闸,电机可以实现带载悬停。
[1]冯学军.电动修井机技术简析[J].油田地面工程,2010(12):6-7.
[2]GB/T23505—2009,石油钻机和修井机[S].
[3]高天彪,柳旭阳,孟艳春.JY5160TXJ10型车载式电驱修井机[J].石油机械,2009,37(7):21-25.
[4]徐宪胜.油田修井设备的现状与发展趋势探析[J].化工管理,2013(10):170.
[5]刘全,叶光辉,钟声,等.“以电代油”改造在青海油田修井机上的应用[J].石油石化节能,2011(7):44-45.
[6]徐茂林.电动修井机技术在辽河油田的应用与展望[J].石油矿场机械,2012,41(9):85-87.
[7]张斌,刘民.修井机新型动力切换装置[J].工程机械与维修,2012(10):136.
[8]Zhang Bing-yi,Shen Jia-yu.A Constant Power Control System for Oilfield Electric Workover Based on Serial Communication between a PLC and a converter[C]//The International Conference on Electrical Engineering and Automatic Control,Nov.26-28,2010 (4) 377-379,Zibo,China.
[9]ZHANG Bing-yi,WANG Chao-zhu,FENG Gui-hong.Studies on wide constant power variable frequency asynchronous motor of workover rig[C]//International Conference on Electrical Machines and Systems 2010,October 10-13,2010 at Songdo Convensia in Incheon,Korea.
[10]王超柱.油田修井机用宽恒功率变频调速异步电机的研究[D].沈阳:沈阳工业大学,2010:3-4.
[11]沈佳昱.基于PLC与变频器RS485通讯的油田电动修井机恒功率自动控制系统[D].沈阳:沈阳工业大学,2011:1-7.
Low-speed and High-torque Permanent Magnetic Motor Direct Drive System for Oil Field Workover
ZHANG Bingyi,LIU Bonian,FENG Guihong,DING Honglong
(School of Electrical Engineering,Shenyang University of Technology,Shenyang 110870,China)
The traditional oil field workover adopts a diesel engine or asynchronous motor as the drive.The diesel engine driving system has low efficiency,high energy consumption and high pollution.The drive system of the induction motor with the gearbox has low power factor,system maintenance is complex and the noise is large.Permanent magnetic motor direct drive system has the advantages of simple structure,high efficiency and energy saving,system maintenance is simple and the noise is low.Permanent magnetic motor direct drive system can solve the problem of traditional diesel engine and asynchronous machine.At the same time,the system also has the advantages of easy control and stable operation.The wide range of constant power expansion of the motor is realized by using the transformation of single star winding and double star winding.The torque ripple of the motor can be reduced by using a special form of surface mounted rotor structure.The closed-loop vector control is adopted to realize the stable running of the motor and the function of cease with load.
workover;permanent magnetic motor;direct drive;constant power expansion;closed loop vector control
1001-3482(2016)05-0047-06
2015-11-10
张炳义(1954-),男,辽宁沈阳人,教授,博士生导师,主要研究领域为机械装备低速大转矩及低压、低速大功率永磁电机直驱系统。
TE935
A
10.3969/j.issn.1001-3482.2016.05.010
