超级电容在汽车制动能回收中的应用研究
2016-09-05张玉龙朱品昌俞建军张玉龙浙江机电职业技术学院杭州310053
张玉龙,朱品昌,俞建军,陈 宁(张玉龙/浙江机电职业技术学院,杭州,310053)
超级电容在汽车制动能回收中的应用研究
张玉龙,朱品昌,俞建军,陈 宁
(张玉龙/浙江机电职业技术学院,杭州,310053)
介绍超级电容自身充电放电迅速,比功率大的特性,与电动汽车制动瞬时回能提供可行方案。利用超级电容提供给无刷直流电机的能量作用于车轮实施制动,降波斩波器处理电机制动能转化为来的电能并向储能部件超级电容充电。比例-积分-导数控制器自动处理无刷直流电机供电与超级电容充电的电流差别信号,使超级电容制动回收电流趋于稳定,最终模拟仿真验证理论的正确性。
超级电容充电;PID差分信号控制;降波斩波器;制动能量回收
0 引言
在车辆非紧急制动的普通制动场合,约1/5的能量可以通过制动回收。制动能量回收按照混合动力的工作方式不同而有所不同。在发动机气门不停止工作场合,减速时能够回收的能量约是车辆运动能量的1/3。通过智能气门正时与升程控制系统使气门停止工作,发动机本身的机械摩擦(含泵气损失)能够减少约70%。回收能量增加到车辆运动能量的2/3。超级电容器独有的高比功率特性非常适合用于制动过程中能量回收,是解决能源危机和环境污染一个重要途径,同时在提升电动汽车既驶里程和环保节能方面意义重大。
1 超级电容充电系统

图1 超级电容制动能回收控制流程图
电动汽车发电制动过程中,制动电流随车速呈指数规律减小的,也表明制动电流随制动力矩减小而减小,本文所使用无刷直流电机,制动电流与制动力矩成正比。汽车制动能回收控制,要求一个便于控制并且波动较小相对稳定的制动力矩,基于超级电容充电过程电压和电流均发生变化,势必造成回能力矩较大波动,所以得出对超级电容恒流充电更加符合要求。采样器将降波斩波器充入超级电容的电流对比设定的电流,所得差值由控制器控制移相器的占空比,进而使无刷直流电机回收来的电经斩波器,斩波器在反馈的稳定的占空比调节下,对超级电容进行恒流充电,如图1所示。
2 超级电容动力电池简介
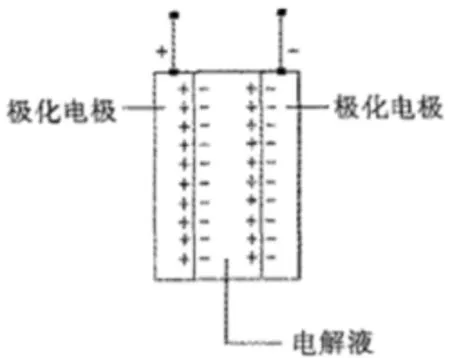
图2 超级电容内部结构示意图
超级电容器是一种具有超级储电能力、可提供强大脉冲功率的物理二次电源。它是根据电化学双电平理论研制而成的,如图所示。当向电极充电时,处于理想化电极状态的电极表面电荷将吸引周围电解质溶液中的异性离子,使这些离子附于电极表面形成双电荷层,构成双电层电容。由于两电荷层的距离非常小一般在以下,加之采用特殊电极结构,使电极表面积成万倍地增加,从而产生极大的电容量,电容器的这种极化作用可以储存电能,如图2所示。
超级电容器结构形式大致分为两种一种是圆柱状电容器,即把基片卷绕起来装进圆形金属外壳内,这种电容器适用于低电压大电流充放电的情况另一种是叠层式的,即将电极基片叠起来,组装在塑料或金属壳内,这种电容器用在高电压小电流充放电的情况下比较合适。由于车载超级电容电池有许多单体电容组成,超级电容理想的模型电路可以等效一个先并联后串联的混联电路。结合电池充放电特性和电容器自身特点,超级电容等效并联电阻要在条件允许下尽可能大,因为电容充电后直流电压在超级电容不工作时,也会和并联电阻形成一个稳定的自放电的漏电流,增大等效并联电阻削弱漏电流延长储能时长。超级电容电池在充电时等效串联电阻会消耗能量降低能量效率。放电过程中等效串联电阻会分掉部分电压,超级电容比功率较大放电电流较大,分压影响明显,严重影响储能效率,因此等效串联内阻要小。
3 超级电容汽车制动能回收控制原理
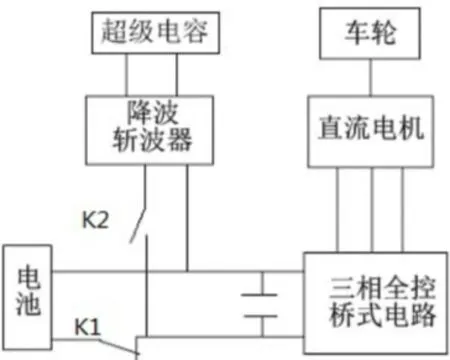
图3 超级电容汽车能量流程图
超级电容汽车制动能回收控制策略,如图3所示,汽车在正常向前行驶时,设定开关K1闭合k2断开,超级电容电能被断开。电池经三相全控桥式电路调控后控制驱动电机,此时化学能转化为动能,无刷直流电机相当于一个电动机。当汽车电气制动时,设定开关K1断开k2闭合,由于制动力矩大时间短,短时间充电量极大,电池比功率无法满足这一要求。无刷直流电机此时相当于一个三相交流发电机,将约束车轮获得能量传化为交流电能,并经过三相全控桥式电路将交流电整成直流电并过滤成与电池电压差不多的直流电,对超级电容进行大功率瞬时充电,从而实现制动能回收。
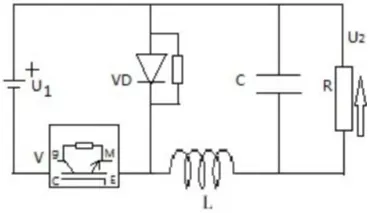
图4 降波斩波器直流电压调节控制器电路
由图中可以得知,绝缘栅双极型晶体管做开关用的斩波器控制原理,设定T为V导通闭合周期,t1为周期内V导通时间,t2为周期内V闭合时间。t1时间内,绝缘栅双极型晶体管驱动信号使V导通,VD截至。此时电感线圈电压UL为:

t2时间内,绝缘栅双极型晶体管驱动信号使V关断,此时电感所蓄能对外放电电流方向沿原电流方向,VD所通电压顺利通过。此时电感线圈L电压UL也是输出负载电压:

可以将(2)式子进行处理,设ɑ=t2/T,ɑ为绝缘栅双极型晶体管驱动信号关断所占比例即占空比。由上面两个式子计算出:

综合以上计算可以明确,此电路图为输出平均电压小于输入电压的降波斩波器。
比较器将系统给定的电流经过控制器移相器斩波器等一些列处理,并作用于电机和超级电容的电流通过反馈对比,最终按两个数据的偏差进行过程控制:i= i1-i2,i为偏差信号,i1为给定信号,i2为反馈信号,控制器以时间为变量参数,信号V(t)输出控制公式:


图5 移相调波示意图
其中Cp为比例系数,Ti为积分时间常数,Td为微分时间常数。
经过PID控制器处理后V(t)波形并不像常用易调的的方波,若想向斩波器输入可以调节缘栅双极型晶体管的方波驱动信号,那就还需要移相器进行波形处理。如图5,PID控制器处理后的波形与移相器内部波形相干涉,再经过处理就可以获得所需理想信号作用于直流电机和超级电容。
4 模拟仿真验证
结合电动汽车自身特点,匹配各部件实现其功能相对应参数。考虑到超级电容充电电流33A的缘故,选定了超级电容等效内阻为0.05欧姆,电容量为60F。最高车速限定在210千米每小时,故无刷直流电机额定V速=1600转每分钟,额定P=700千瓦,额定V=220伏。比例-积分-导数控制器采用比例-积分控制器,比例系数取35.2,积分时间常数取119.2.处理PI控制器输出到降波斩波器信号的移相器波形f=11000Hz,范围在0-120的变化幅值。
最终将恒定电压的直流电转变为电压较低可变的直流电的降波斩波器所需数据确定为L=55mA,C=120μF。从图6中不难看出,制动过程中无刷直流电机可以看作一个发电机将制动能转化为电能向超级电容充电,随着制动时间增加车速减小,所以电机输出电压随制动时间近似以指数形式降低。在制动时间内且电机输出电压高于超级电容电压时,超级电容处于恒流充电状态且电压增长不明显,制动末期电机输出电压开始小于超级电容到电机发电结束,这段时间电机所发直流电不能继续向超级电容充电。
5 小结
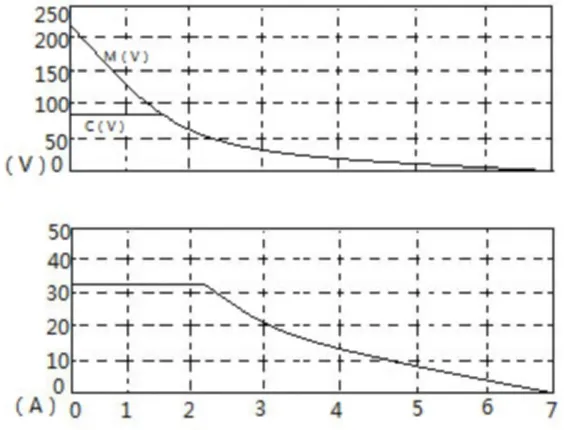
图6 超级电容制动能回收仿真电压电流示意图
本文研究超级电容应用于电动汽车制动能回收,首先介绍超级电容的比功率高适合短时高电流充电的特性确定了一种比较贴切的充电方法。阐明比例-积分-导数控制器工作原理,通过控制比较器得出的电机输出电流与超级电容充电电流的偏差电流,在编写好的比例-积分控制公式运作下,实时监测绝缘栅双极型晶体管驱动信号导通关断情况,控制向超级电容充电电流的稳定性,以便于制动时汽车惯性动态变化随动制动力矩的适应。对比例-积分-导数控制器输出的信号进行整波处理移相器、降波斩波器的内部结构剖析,通过模拟仿真验证超级电容可以在短暂的制动时间里实现对变化制动力矩的控制,以及自身制动时稳定的充电状态,仿真制动能回收的良好结果对增加电动汽车续驶里程和环保节能意义重大。
[1] 张玉龙.超级电容在混合动力汽车中的应用发展[J].自然科学版.2012.(3):30-33.
[2] 肖佐光.基于超级电容电动汽车制动能回收的研究[J].技术纵横.2015(8):94-98.
[3] R.L.Spyker, R.M.Nelms,S.L.Merryman, Evaluation of Double Layer Capacitors for Power Electronic Applications[J].Applied Power Electronics Conference and Exposition, 1996,(2):725- 730.
[4] 钟海云.双电层电容器的研制[J].电子元件与材料, 2001,20 (5): 3- 5.
[5] 罗曼.降低双电层电容器等效串联内阻的研究进展[J].高电压技术, 2005, 31 (12): 26- 28.
张玉龙,男,1983.02,浙江杭州,汉族,教师,助教,新能源汽车。
The application of super capacitor in the car braking energy recycling
Zhang Yulong,Zhu Pinchang,Yu jianjun,Chen Ning
(zhang yl/mechanical and electrical professional technology institute of zhejiang.hangzhou,310053)
The article introduces the super capacitor charge discharge itself quickly,than the characteristics of large power,and the electric car braking instantaneous can provide feasible solution.Using ultracapacitors provide energy function of brushless dc motor in wheel braking,chopper down wave processing electric mechanism is transformed into kinetic energy to electrical energy and super capacitor charging to the energy storage components.Proportional integral derivative controller automatic processing power brushless dc motor with the super capacitor charging current difference signal,the super capacitor recycling braking current stable,finally simulation verifies the correctness of theory.
super capacitor charging;PID difference signal control;send a wave of chopper;braking energy recovery
