核电站水下机器人抓取规则研究
2016-09-05朱雅乔
朱雅乔
(天津中德职业技术学院,天津 300350)
核电站水下机器人抓取规则研究
朱雅乔
(天津中德职业技术学院,天津300350)
针对核电站水下机器人机械手抓取难点,综合机器人运动学分析及机械手运动规划的研究,探讨并制定了机械手的抓取规则。抓取规则很好地克服了抓取过程中存在的难点,并通过实验证明了该方法的理论意义及其应用价值。
水下机器人;运动学;抓取规则
核电站水下机器人需要完成异物抓取任务,由于核环境的特殊性,抓取可靠性至关重要。本文综合机器人运动学分析及机械手运动规划的研究,探讨并制定机械手的抓取规则。抓取规则很好地克服了抓取过程中存在的难点,并通过实验表明了规则的理论意义及其应用价值。
一、核电站水下机器人运动学分析
核电站水下机器人由四自由度机械手固定在一个移动本体上构成,本文建立了核电站水下机器人的运动学模型,获得了四自由度机械手末端与机械手各关节角及移动本体转角的关系,以及核电站水下机器人的最优位姿,为抓取规则制定打下基础。
在建立核电站水下爬行机器人运动学模型前,作如下假设[1]:
(1)移动本体只在二维空间内移动;
(2)移动本体车轮与地面为点接触,且为纯滚动,不存在滑动;
(3)四自由度机械手刚性固联在移动本体上;
图1为核电站水下爬行机器人的运动学模型。如图所示,移动本体质心——I;两后轮中点——P;四自由度机械手末端点——E;固联点——F;P点与质心I之间的距离——IL;I与点F之间的距离——FL;左右两侧轮之间的距离——2b;轮子半径——r;平台导向角——pθ,;左侧驱动轮转角——Lθ;右侧驱动轮转角——Rθ。
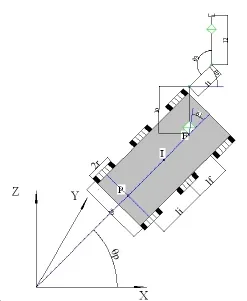
图1 核电站水下机器人的运动学模型
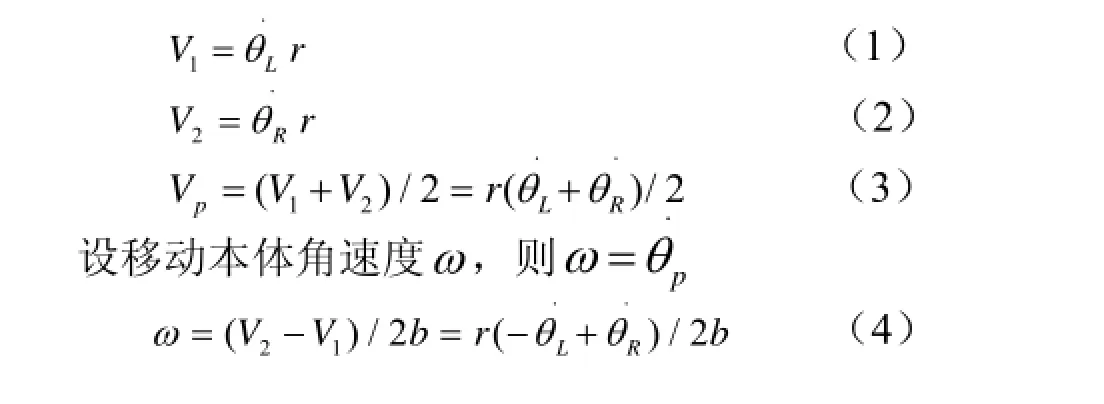
两后轮中心点P与驱动轮的线速度关系为(1V为左侧驱动轮线速度;2V为右侧驱动轮线速度;pV为P点线速度):
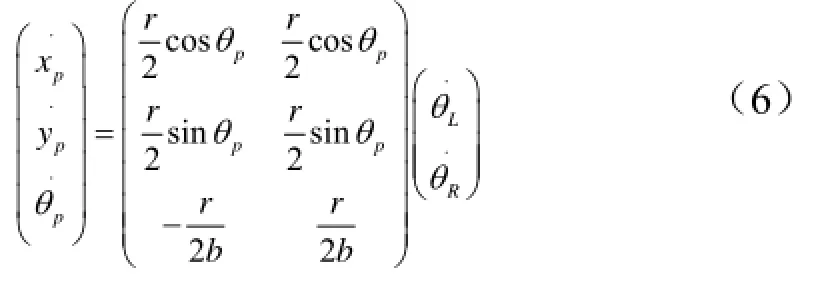
坐标轴上P的速度为:

整理式(1)~(5)得:
同理式(5),IV分解为:

对式(7)化简,得到:

由图1可知,点F与点I在坐标系中的位置关为:
系

对式(9)进行求导变换,得到:
由式(5)、式(6)、式(7)、式(10),整理:得
由式(11),得到:
对式(12)进行求导变换,得到点E与点F三个方向的线速度关系:
对式(13)进行变换整理,得到其矩阵表示:

式中,

对式(14)进行整理,得:

在理想情况下,可以认为移动本体转向是点P绕中心轴的旋转,视为由于左右两侧驱动产生的速度差,实现本体的转向。因此,式(15)反映了四自由度机械手末端E、机械手与移动本体固联点F的速度与机器人各关节角以及移动本体转角的速度关系。
二、机器人的操作性能分析
采用可操作度[2]来描述该机器人的灵活性,分析机器人整体的操作度,得到机器人的最优构形。
采用Matlab推导了核电站水下爬行机器人操作度,将符合要求的转角代入式,求得不同位姿下的操作度。 θ
°时,移动本体改变四自由度机械手末端位姿的能力最大。为简化计算,只取2θ、3θ两个变量,每次以微小数值进行变化,记录可操作度数值,得到核电站水下爬行机器人可操作度分布,如图2所示。时,核电站水下爬行机器人出现最优位姿。此位形是核电站水下爬行机器人空间最优位姿,若考虑机器人抓取时,只需求取地面位姿即可。在机器人工作时应首先保证机器人不出现操作度为0的情况,其次应使机器人处于操作度大的位姿,便于控制、规划。
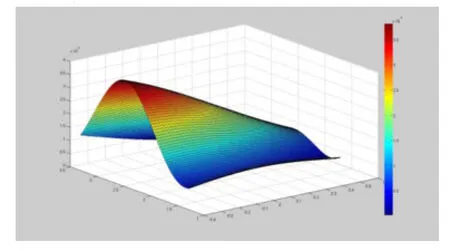
图2 核电站水下机器人可操作度分布
三、核电站水下机器人的抓取规则
1.机械手抓取可操作性分析
机械手完成抓取任务还需要将机械手的运动传递给所抓物体。这个指标反映了机械手的灵活程度,本文通过可操作度来描述。10θ°=时移动本体改变四自由度机械手末端位姿的能力最大,通过对预抓取平面和预放置平面的操作度寻优,找到此时的位形即为最优预抓取(放置)位形。设距地面30mm的平面为预抓取平面,得到10θ°=,操作度变化曲线如图3所示:
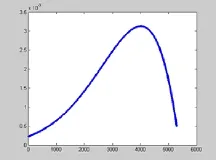
图3 预抓取平面操作度变化曲线

图4 预放置平面操作度变化曲线
θ2=-11.3°,θ3=156.85°时机械手在预抓取平面获得最优位姿。同理如图 4得到 θ2=-53.54°,θ3=-117.04°时机械手在预放置平面获得最优位姿。核电站水下机器人需要完成形状规则、重量轻的物体抓取任务,应该考虑机械手运动的传递。
2.机械手夹持力分析
机械手手爪夹紧力计算公式为[3]:

式中:
K——安全系数,通常取1.2~2
K2——动载系数,K2=1+a/g ,a为夹持异物在运动过程中的加速度,g为重力加速度
K3——方位系数,手爪夹持过程中的不同方位影响系数
G——工件重量
3.核电站水下机器人的抓取规则
(1)保证机械手在抓取平面抓取可操作度大,便于机械手向物体传递运动;
(2)保证机械手对称开合,且两指对称开合与物体接触点距离重心近,便于提高抓取成功率;
(3)保证抓取夹持力大于式(16)得出的所需最小夹持力,便于控制系统对于夹持力的控制;
(4)保证规划路径中机械手不出现奇异位形,避免造成控制复杂化,引起失控。机械手轨迹规划及其位形显示如图5所示。

图5 机械手轨迹规划及其位形显示
(5)保证机械手与物体一起运动过程中物体不会发生掉落。从式(16)中知,需要对2K系数中的加速度a进行约束。本文通过对机械手进行轨迹规划,调节各路径点的到达时间,保证各关节输出转矩小于额定转矩,找出运动规划过程的maxa,将其带入式(16),结合方位系数得到机械手运动过程中的夹持力。如图6-11表示了规划中的轨迹,关节输出力矩以及末端速度、加速度情况。

图6 末端运动轨迹

图7 末端位置

图8 空气关节力矩
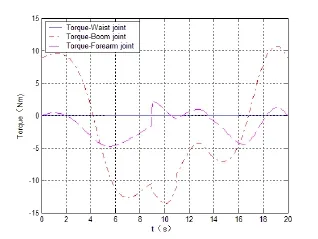
图9 静水关节力矩
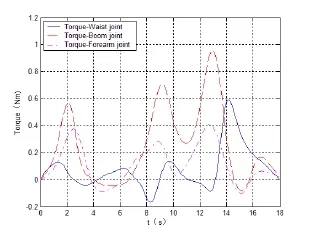
图10 搅水关节力矩

图11 末端速度加速度
四、抓取实验
为了验证抓取规则是否对抓取成功率和抓取效率起到提高作用,采用质量约1.5kg的胶质木棒小锤作为抓取异物,通过机器人在环境中自由抓取与按抓取模式下抓取规则指导抓取进行比较。

图12 核电站水下机器人自由抓取
图12所示机器人进行自由抓取。借助视觉帮助,机械手抓取一次用时约6-7分钟,平均试抓3次才能将异物抓取。

图13 核电站水下爬行机器人指导抓取
图13所示机器人进行指导抓取。机器人通过超声测距传感器将移动本体运动到机械手可抓范围内,移动本体位置使机器人距异物达到指定距离,张开手爪,快速将机器人进入预抓取模式,借助视觉帮助测定质心位置,虚拟现实系统计算轨迹以及夹持力大小并传输给控制系统,机械手进入抓取模式,一次抓取用时不到2分钟,1次就能抓取成功。
五、结论
本文综合机器人运动学分析以及机械手轨迹规划的研究成果,制定了机械手抓取规则,从抓取实验结果可以看出,自由抓取与操作人员的熟练程度有很大关系,而抓取规则指导抓取对提高机器人抓取效率和成功率都有很大帮助。
[1]胡坤.移动机械手运动学分析及仿真[D].天津:河北工业大学,2006.
[2]Yoshikawa J.Manipulability of Robotic Mechanisms[J].Int J.Robotics Research,1987,4(2):3-9.
[3]李向阳,杨桂茂,安永辰.夹钳式手部力分析及实验研究[J].哈尔滨工业大学学报,1985(A6):18-21.
Research on Underwater Robot Grasp Rules in Nuclear Power Plant
ZHU Ya-qiao
(Tianjin Sino-German Vocational Technology College, Tianjin 300350, China)
According to underwater robot grasp difficulties in nuclear power plants,kinematic analysis of robot and manipulator grasp mode are explored and developed.Grasp rules can overcome the difficulties existing in the process of grasping.By grasping experiments,the robot is analyzed about how to complete grasp tasks more effectively.
underwater robot;kinematic;grasp rules(责任编辑 李建武)
TP242
A
1008—6129(2016)01—0068—05
2015—12—11
朱雅乔(1989—),天津人,天津中德职业技术学院航空航天与汽车学院,助教。