机载无线光通信设备设计及试验验证
2016-09-03覃智祥安建欣李树德曾智龙
覃智祥,安建欣,李树德,孙 晖,曾智龙
(中国电子科技集团公司第三十四研究所,桂林 541004)
工程与应用
机载无线光通信设备设计及试验验证
覃智祥,安建欣,李树德,孙晖,曾智龙
(中国电子科技集团公司第三十四研究所,桂林541004)
机载无线光通信以其抗电磁干扰特性而备受关注。介绍了一种2.5 Gbps机载无线光通信设备的设计思路,阐述了无信标光捕获跟踪方案,并对其光学伺服稳定系统组成进行分析。利用相距1.5 km的两个六自由度摇摆台搭建了试验验证系统,在强振动飞行平台模拟环境下对设备样机进行外场通信演示,传输图像清晰稳定,误码率低于10-7。测试结果验证了设计思路的可行性。
机载无线光通信;自动跟踪;抗电磁干扰
TN929.1
A
1673-5692(2016)02-169-04
0 引 言
无线光通信不受电磁影响,通信容量大,是复杂电磁环境下通信保障的可靠手段,非常适合应用于空地、空空等通信链路。机载无线光通信设备在工作时需要两端进行精确的对准,才能确保通信链路不中断。因此,保持强振动、随机运动等机载平台环境下光束的稳定跟踪,是机载无线光通信设备工程化的难点之一[1]。本文针对该平台特点设计了高性能的伺服稳定系统,有效地降低了强振动带来的
干扰,完成了一款机载无线光通信设备的研制,并利用六自由度摇摆台模拟飞行平台振动,实现了1.5 km 外场试验验证。
实际飞行试验成本高昂,因此在地面进行机载平台模拟的方式是常用验证手段。目前现有的平台模拟方式多为基于光学式视轴抖动法的室内桌面系统,利用快速倾斜镜控制激光束的二维抖动以模拟机载平台运动,激光束经平行光管传输后由机载激光设备跟踪接收[2-3],该方法操控灵活,系统紧凑,但不便于大角度、双动态跟瞄的演示,而且没有考虑湍流影响的因素。
1 机载无线光通信设备的设计
1.1系统总体方案组成
机载无线光通信设备主要由光学系统、通信系统、伺服稳定系统、ATP系统等几部分组合,其单元组成如图1所示。
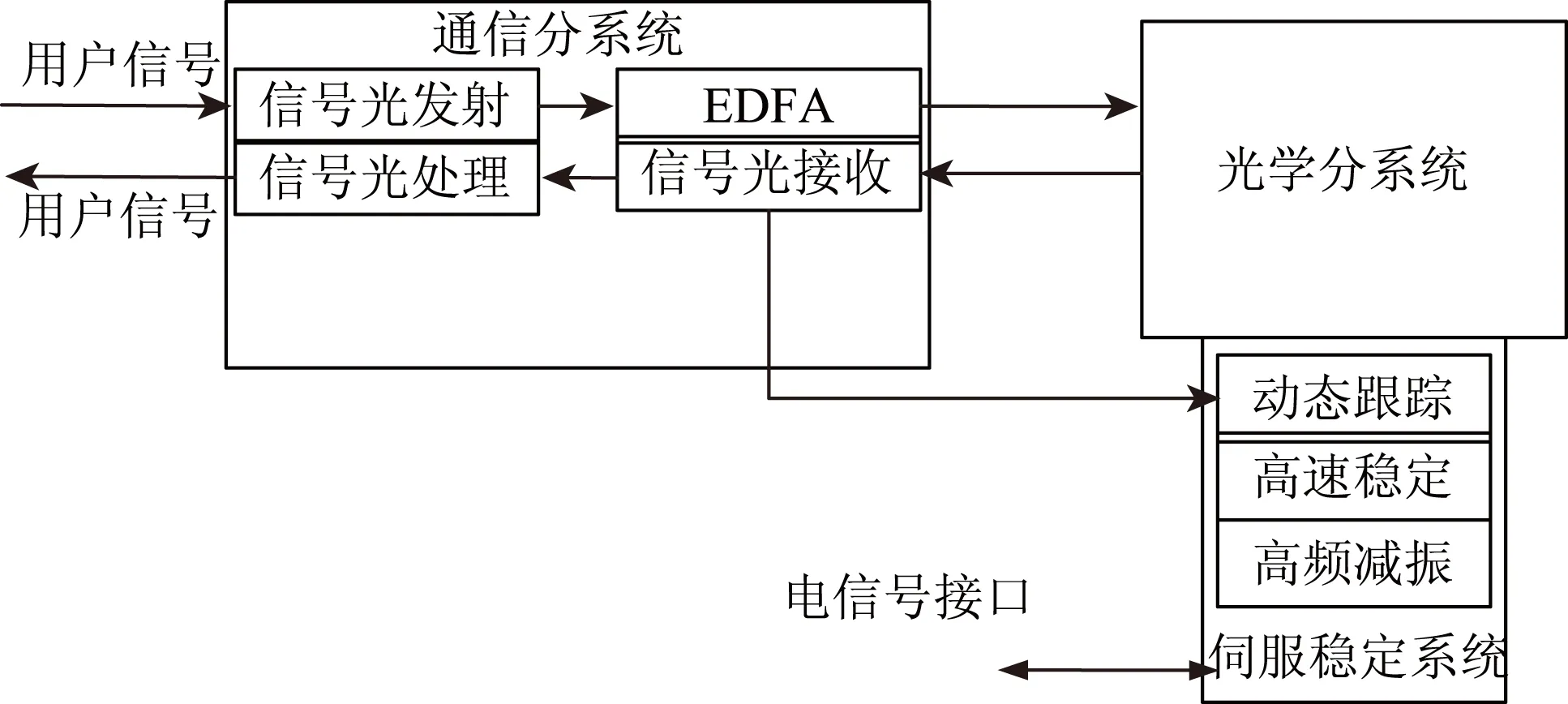
图1 机载无线光通信系统单元组成框图
通信分系统主要完成电光转换及光信号的大功率输出、长距离传输后小功率信号的高灵敏度接收以及信道纠错编码等功能;光学分系统主要完成信号光/信标光的发射、接收;ATP系统主要在开通阶段完成扫描、捕获功能,在通信阶段完成跟踪功能,保持光学天线的始终对准,跟踪执行机构放在伺服稳定系统里面;伺服稳定系统主要功能是隔离飞机平台的高频低幅振动,使其转化为跟踪系统能够承受的低频低幅振动,并且使外界大幅扰动限制在动态跟踪环的可进行正常跟踪范围内;通过电信号接口可获取飞机的位置及姿态信息,并进行指向计算,同时也可向飞机平台反馈转台角度信息。
本设备采用信号光与信标光合一的方式,仅有一个1550 nm信号光源,利用信号光作为信标,没有专门的信标光源,如此可减少信标部分的功耗体积重量,有利于系统简化。最高通信速率为2.5 Gbps,支持向下兼容。设备采用U型转台结构,支持水平360°、俯仰30°~150°的转动范围。
1.2光学系统
采用卡赛格伦结构的光学天线,其组成框图如图2所示,该光学系统包括四条信道,收发光学天线是一个直径为90 mm的卡赛格伦结构望远镜,其与后端光学设备的设计具有一定杂散光抑制能力。考虑到不同的应用环境,光束发散角设计为40 μrad~2 mrad可选。
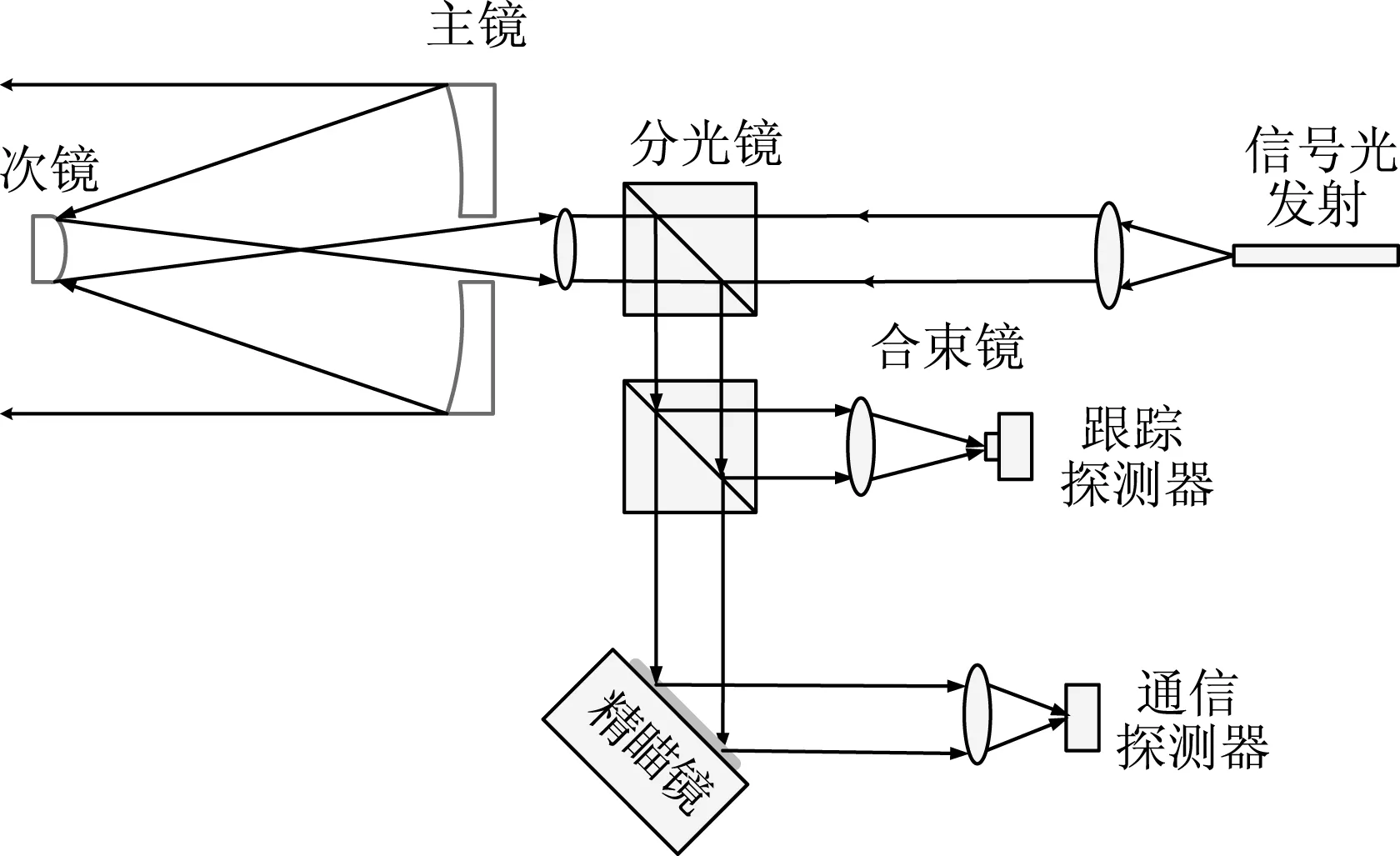
图2 机无线光通信光学系统示意图
1.3伺服稳定系统
伺服稳定平台的主要作用是将运动载体输出的振动、晃动、转动等会对无线光通信带来干扰的运动进行隔离或减弱,使其上端的跟瞄系统能在限定的视轴范围内进行正常的自动跟踪。图3所示为整个伺服稳定平台的系统工作原理框图。
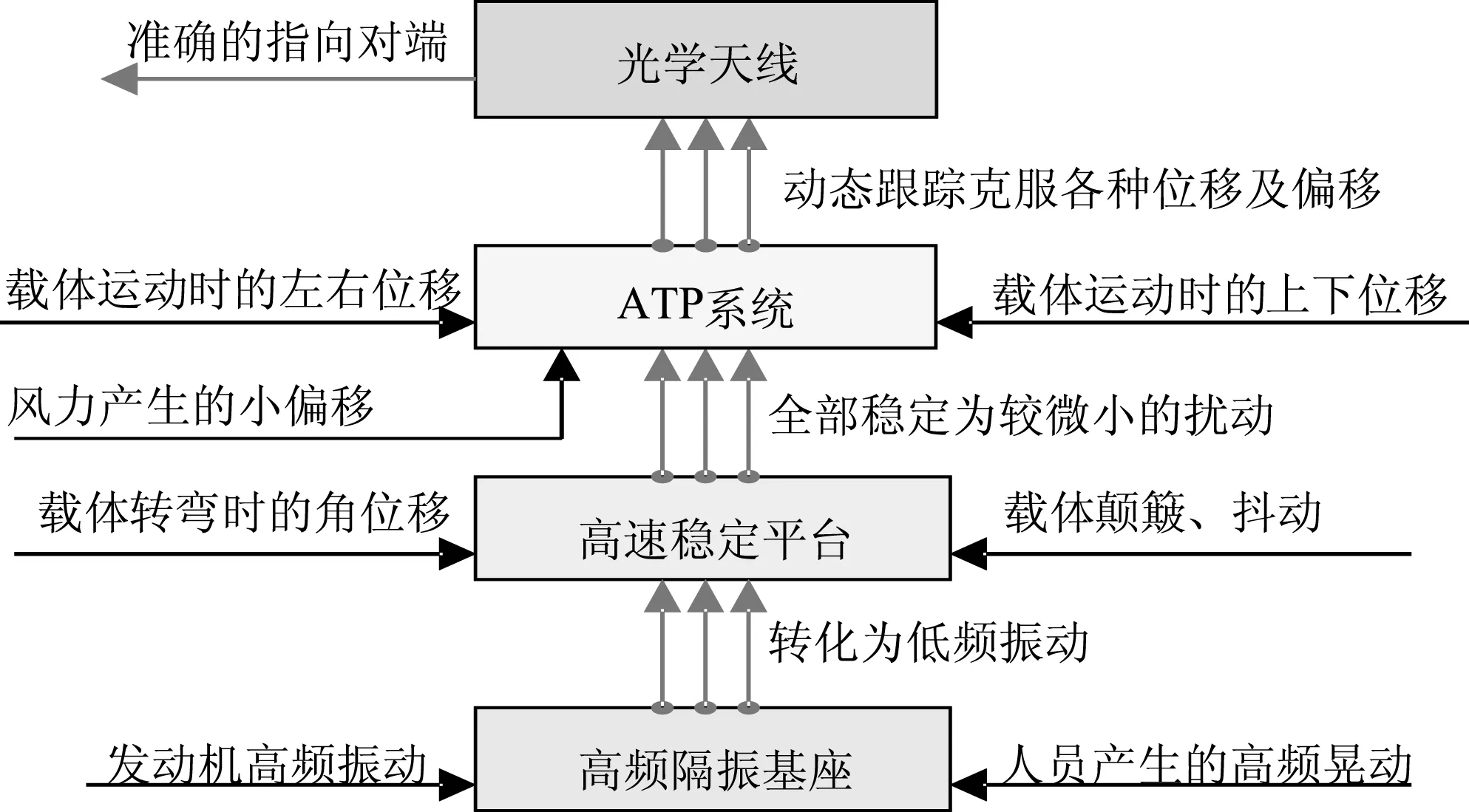
图3 伺服稳定平台工作原理
高频隔振基座负责隔离飞机发送机工作时产生的高频振动及高频晃动,高速稳定平台可以将转弯或气流造成的飞机抖动全部进行实时高速的稳定处理,伺服稳定系统配置以惯性陀螺仪角振动传感器为核心的视轴稳定回路。ATP系统、光学平台系统均安装在陀螺稳定平台上,这样设计的目的是保持在一定精度要求条件下光电传感器接收光束视轴的相对惯性空间稳定,从而达到保证通信端机之间建立可靠、稳定通信链路的目的[4]。
高速稳定平台的设计目的是实时感测飞机飞行时产生摇摆和部分振动影响等姿态变化,以保证发射激光束在一定精度要求条件下能准确对准接收端机。考虑到一般运动载体较少发生横滚运动,同时由于无线光通信设备发射激光束传输轴向方向的横滚运动对通信光或信标光的接收效果影响不大,综合以上因素,本设备采用了方位-俯仰两轴控制环架作为光学平台承载的稳定平台。稳定平台采用陀螺来测量平台运动,姿态角的变化经过陀螺检测放大后反馈给环架的力矩电机,驱动平台保持光学天线的稳定。通过高速伺服稳定系统加上ATP系统的动态跟踪联合处理,机载无线光通信系统将具有实时动态感测运动载体摇摆、振动等姿态变化的功能,同时系统具有补偿运动载体姿态变化引起光束指向偏差的功能,通过ATP系统处理,可以保证发射、接收激光束在一定精度要求条件下的准确对准。
2 飞机模拟环境通信试验验证
利用该机载无线设备样机、六自由度摇摆台等仪器设备搭建了测试系统,测试配置图如图4所示。
通信两端均采用空中设备样机,一端位于桂林市环城北二路彭家岭一栋民宅5楼,设备放置在六自由度摇摆台上,通信演示时由六自由度摇摆台模拟飞机平台运动姿态;另一端位于中国电子科技集团公司第三十四研究所批产楼6楼,设备同样放置在六自由度摇摆台上,通信演示时由六自由度摇摆台模拟飞机平台运动姿态。通信链路全长1.5 km,通信两端均为动态目标,演示视频的传输,并由通信误码分析仪、光功率计等仪器进行监测。
试验现场图及实时传输的视频图像如图5所示。试验时当地天气为雾霾,PM2.5为150~210之间,能见度2~4 km,六自由度摇摆台在横摇0~±5度、纵摇0~±5度、艏摇0~±5度等参数范围内做飞机模拟运动,其中摇摆台自身还进行振动,输入摇
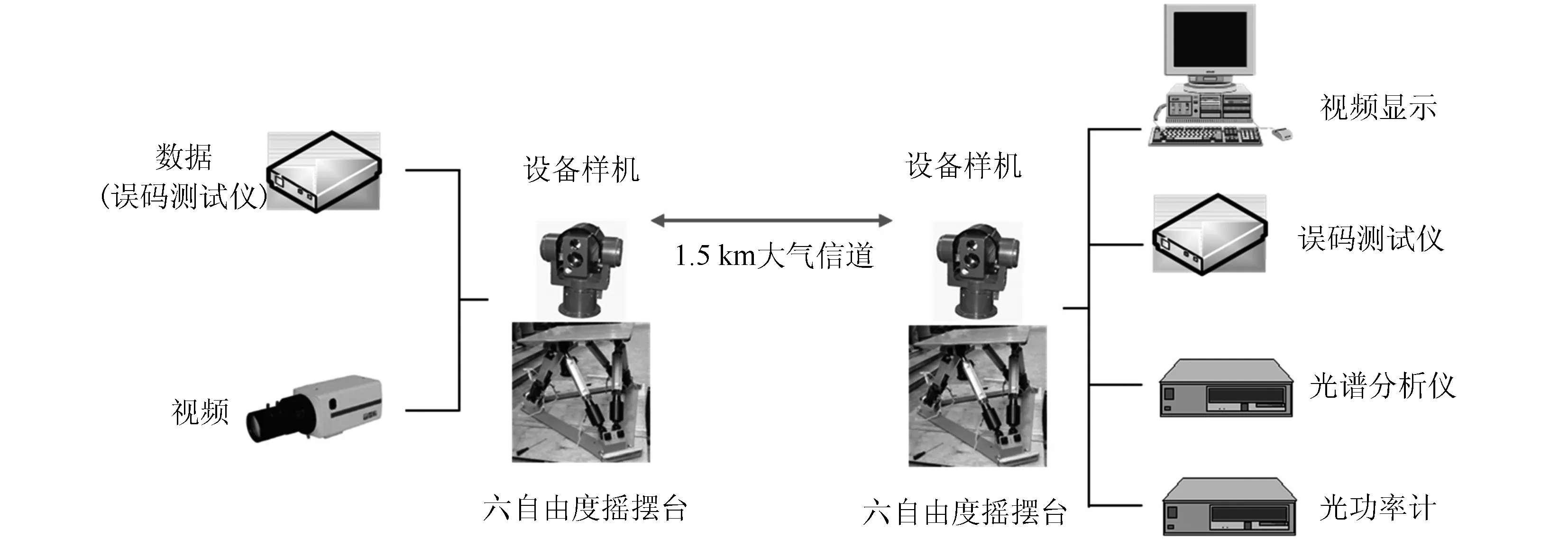
图4 测试系统配置图
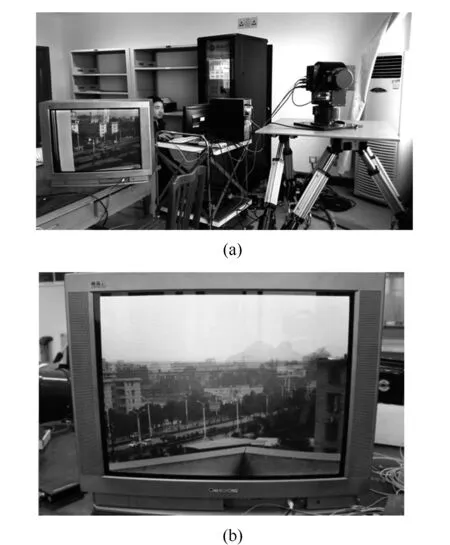
图5 (a)测试现场图 (b)实时传输的视频
动频率5 Hz,由于摇摆台没有固定于地面,试验过程中其自身产生了较大的谐振,实际造成的微振动频率远大于摇动频率。由于未配备惯导系统,因此在摇摆台工作前人工调整了设备两端天线的位置,使两端天线指向范围控制在数mrad以内,摇摆台运行后两个设备自动开展扫描、捕获、跟瞄等流程,最终实现稳定通信。试验主要参数如表1所示。

表1 试验指标参数
误码率测试时长为30 min,误码率为10-7,整个测试过程中图像传输清晰稳定。此外还分别进行了遮光、禁用精跟踪功能等试验,当天线被遮挡2 s以内时,设备可凭借历史轨迹迅速完成光束捕跟,瞬间可以自动恢复图像传输;而当天线被遮挡超过3 s时间,系统则需要重新进行扫描才能恢复图像传输;当禁用精跟踪功能之后,图像传输中断,不能看到完整的图像。而随着振幅和频率的进一步加大,通信链路中断,这是由于通信终端摇摆台角加速度大于了转台转动能力,跟瞄系统不能反应,但该情况对于实际的远距离空基应用而言是极少的。
试验过程的接收光功率在±1 dBm范围内跳动,由于存在大气随机扰动,因此该功率跳动不能量化地反映设备的跟踪误差,但证明了系统的跟瞄稳定性。
3 结 语
机载无线光通信技术越来越受到国外内商用和军用的重视,其通信方式可能会成为未来移动大容量通信的有效手段[5]。但机载飞行时容易受到平台强振动等因素的影响,给机载无线光通信设备工程化带来一定的实现难度。本文介绍了一种机载无线光通信设备的设计思路,论述了其光学伺服稳定系统实现原理,通过搭建基于六自由度摇摆台的模拟飞行传输试验,证明了其在强振动、大幅度摇摆条件下的稳定通信能力,试验距离1.5 km,通信速率2.5 Gbps,误码率为10-7,整个测试过程中图像传输清晰稳定,有效验证了设计思路。
[1]姜会林等.机载激光通信环境适应性及其关键技术分析[J]. 红外与激光工程,2007,36(增刊):299-302.
[2]佟首峰等.自由空间激光通信平台振动模拟实验系统研究[J]. 兵工学报,2008,29(8):1001-1003.
[3]周浩天等.机载光通信平台振动模拟系统的设计与实验[J]. 光电子:激光,2014,25(7):1315-1318.
[4]曾智龙等.“动中通”无线激光通信系统研制[J]. 光通信技术,2010,34(8):46-48.
[5]曹阳等.机载空间光通信平台的交互多模型粒子滤波跟踪算法[J]. 红外与激光工程,2012,41(11):3065-3068.
覃智祥(1985—),男,广西壮族自治区象州人,工程师,主要研究方向为空间光通信;
E-mail:qinzx34@163.com
安建欣(1980—),男,河北省安国人,工程师,主要研究方向为空间光通信;
李树德(1985—),男,山东省临沂市人,工程师,主要研究方向为空间光通信;
孙晖(1981—),男,河北省保定市人,高级工程师,主要研究方向为空间光通信;
曾智龙(1973—),男,广东省化州人,研究员级高级工程师,主要研究方向为光通信。
The Design and Demonstration of Airborne Laser Communication Equipment
QIN Zhi-xiang,AN Jian-xin,LI Shu-de,SUN Hui,ZENG Zhi-long
(The 34thResearch Institute of CETC,Guilin541004,China)
With unique advantage of anti-interference ability, space laser communication has become the focus of telecommunication field. The design concept of a 2.5 Gbps airborne wireless optical communication equipment is introduced,the scheme of non-extra-beacon optical acquisition and tracking is described, and the composition of the servo stabilization is analyzed. Finally, a flight simulation experiment system is set up by using two 6-DOF platforms apart from 1.5 km. In strong vibration simulation environment, the transmission image is clear and stable, and the bit error rate is lower than 10-7. The validity of this design concept is demonstrated by the test.
Airborne laser communication; Beam tracking; anti-jamming
10.3969/j.issn.1673-5692.2016.02.009
2016-03-01
2016-03-23
