多传感器信息融合在Φ—OTDR系统中的应用
2016-09-02杨德伟李立京孙昌君北京航空航天大学仪器科学与光电工程学院北京100191
李 灏,杨德伟,李立京,钟 翔,孙昌君(北京航空航天大学仪器科学与光电工程学院,北京100191)
应用技术
多传感器信息融合在Φ—OTDR系统中的应用
李灏,杨德伟,李立京,钟翔,孙昌君
(北京航空航天大学仪器科学与光电工程学院,北京100191)
针对相位敏感光时域反射计(Φ—OTDR)扰动传感系统存在较为严重的漏警和误警现象的问题,提出了一种多传感光纤系统方案。该方案结合多传感器信息融合理论,将传统的Φ—OTDR系统扩展为多路方案,并利用一种改良的D-S证据理论算法完成了多路信息的融合。通过实验证明了方案的可行性,漏警率由2%降至了0;误警现象由72 h内出现9次降至0次。
相位敏感光时域反射计;多传感器信息融合;报警准确性
0 引言
基于相位敏感光时域反射计(Φ—OTDR)的分布式光纤扰动传感器,具备高灵敏度、高定位精度、长监测距离、分布式实时监测等优点,在安防领域有着广阔的应用前景[1]。报警准确率是Φ—OTDR扰动传感系统的关键指标之一,Φ—OTDR所检测的后向瑞利散射信号极其微弱,且受系统元件稳定性、应用环境复杂性的影响,容易出现漏警或误警现象,影响Φ-OTDR扰动传感系统的监测效果。传统方案中,想要提高报警的准确性,往往需要采用性能更加优良、稳定性更高的光学器件,大大提高了系统的成本,限制了系统的实用推广。
近年来,多传感器信息融合技术研究的深入,为解决这一问题提供了新的思路与手段[2]。本文提出一种Φ—OTDR扰动传感系统的多路信息融合方案,利用多个传感器间冗余性与互补性,提高Φ—OTDR系统报警准确率。
1 Φ—OTDR多传感器方案
图1所示为Φ—OTDR分布式扰动传感器的工作原理[3]:光脉冲自光纤一端注入,在光纤内传播时会产生后向瑞利散射。Φ—OTDR系统采用窄线宽光源,脉冲宽度区域内的后向瑞利散射光发生干涉后,光强可以被探测到。当光纤上某点发生扰动时,干涉作用会引起后向散射光光强变化。受影响时刻的瑞利散射光强曲线同正常时刻的曲线做减法运算,可以得到定位结果曲线,反映出扰动情况。
Φ—OTDR多传感器信息融合光路方案同传统Φ—OTDR方案相比,可以将多路传感器采集到的数据进行综合处理,利用多传感器信息间的互补性与冗余性,形成更加全面、精确的判断结果,增强信息的可靠程度[4]。光纤传感器的数量可以根据实际应用需求、系统硬件性能等因素进行添加与删减,理论上扩展的数量越多,系统报警性能就越优越。
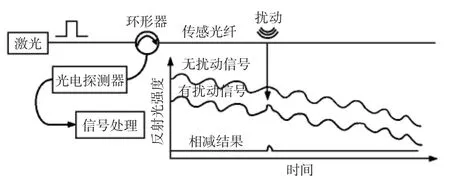
图1 Φ—OTDR系统原理图Fig 1 Principle diagram of Φ—OTDR system
2 多传感器信息融合方法
考虑到系统实时性需求,本系统采用特征级融合,将各个传感器的原始数据进行特征提取作为待融合信息。融合算法采用了基于D-S证据理论的改良算法,利用一致性检测来衡量证据间彼此支持的程度,作为证据的权重[5~7],据此进行D-S融合。
2.1多传感器信息特征提取
在Φ—OTDR多传感器系统中,建立各传感器的概率函数,作为融合的特征信息。对于识别框架Θ上的基本概率赋值函数m,应满足以下条件

Φ—OTDR系统中各传感器在识别框架内包含4种状态:1)实际有扰动,发出警报;2)实际有扰动,未发出警报;3)实际无扰动,发出警报;4)实际无扰动,未发出警报。
据此可建立描述报警事件的概率函数m,形式如m= (a,b,c,d)。
当系统有扰动报警时,a+c=1,b=d=0。a值代表报警是由扰动引起的概率,同定位曲线的信噪比呈正比,计算公式定义为

式中S为定位曲线峰值,代表信号值,N值定义为定位曲线第2~102个点的平均值,代表对信号构成干扰的噪声。
当系统无报警时,b+d=1,a=c=0。b的值代表出现漏警的概率,通过实验室测试漏警的先验概率结合光强的衰减公式

式中L指在有扰动路中触警位置,km。
2.2特征信息的融合算法
对各传感器的概率函数进行融合,每个概率函数作为一个证据,步骤如下[8,9]:
对n个证据进行求和与归一化,得到各个目标的权重wi,计算公式如下

式中m1,m2,…,mn分别为n个证据,对于其中一个证据函数mj=(mj(A1),mj(A2),mj(A3),…,mj(AN)),Aj为某一个证据识别框架内的某个目标。
计算两个证据m1与m2的距离公式为[10]

证据的相似程度计算如下

证据mi获得其他证据支持度的计算公式为

可得证据mi的可信度Crd(mi),作为证据mi的权重

加权平均证据计算公式

式中

对得到的加权平均证据m使用D-S理论进行n-1次自组合,组合公式为

2.3融合算法的仿真
基于以上融合步骤,进行了如下的实验仿真,模拟了三种可能对系统报警构成干扰的情况。其中,光纤传感器的数量选择为4个,仿真结果如表1~表3。
1)外界环境噪声较大,对扰动信号造成了一定淹没,故各路信噪比都较低。
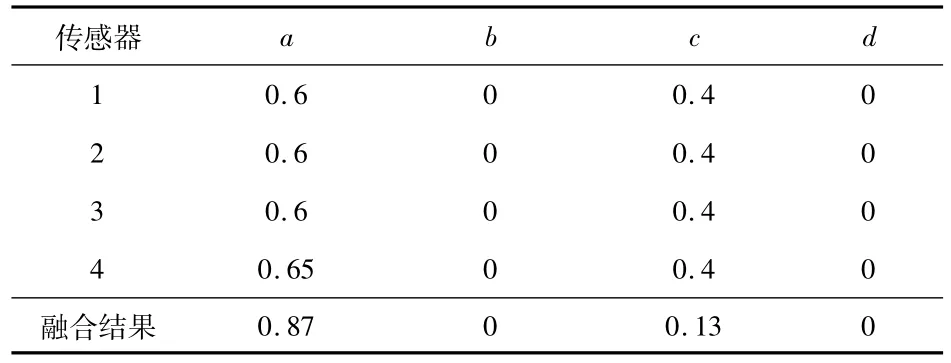
表1 情况一中信息融合的仿真结果Tab 1 Simulation result of information fusion in the first case
2)外界有微小扰动时,某个传感器出现了漏警故障,其他正常报警。
3)外界无扰动时,某个光纤发出了误报,其他光纤不报警。
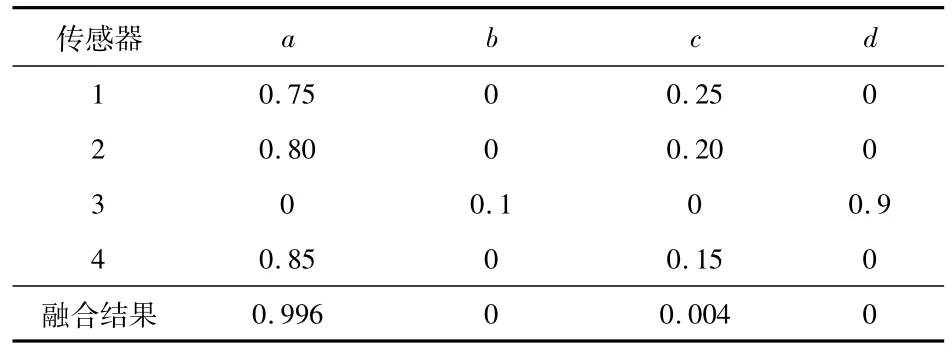
表2 情况二中信息融合的仿真结果Tab 2 Simulation result of information fusion in the second case
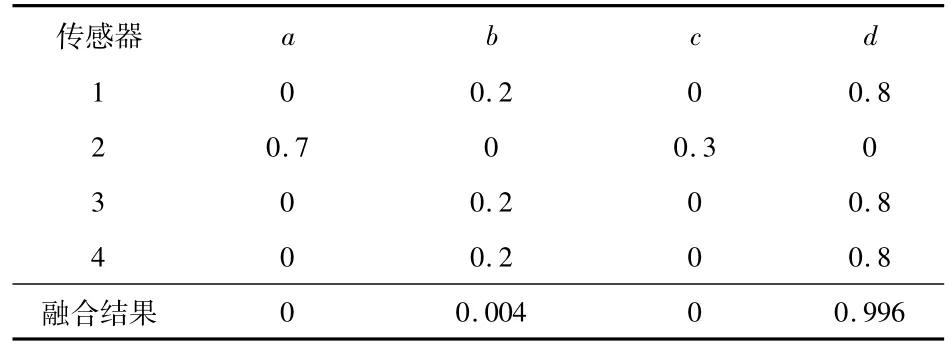
表3 情况三中信息融合的仿真结果Tab 3 Simulation result of information fusion in the third case
通过以上仿真结果,可以得到结论:Φ—OTDR的多路信息融合方案可以明显提升系统的扰动判定性能。具体体现在:对于几个可信度不高的传感信息,经过融合以后可以得到对结果支持力度较高的证据;对个别传感器的漏警和误警现象,多路方案具备很强的抵抗能力,综合结果可以较好地予以排除。
3 实验验证
搭建实验系统如图2所示,超窄线宽(1.3 kHz)激光光源输出波长为1550nm的光,被SOA(消光比为30dB)调制为脉冲光,脉冲周期为400 μs,脉宽为200 ns(占空比为0.05%),此时对应的空间分辨率可达20 m。产生的脉冲光经过EDFA放大以后,分为四路注入各路光纤内,采集各路的后向瑞利散射数据,在数据处理单元进行进一步的处理。
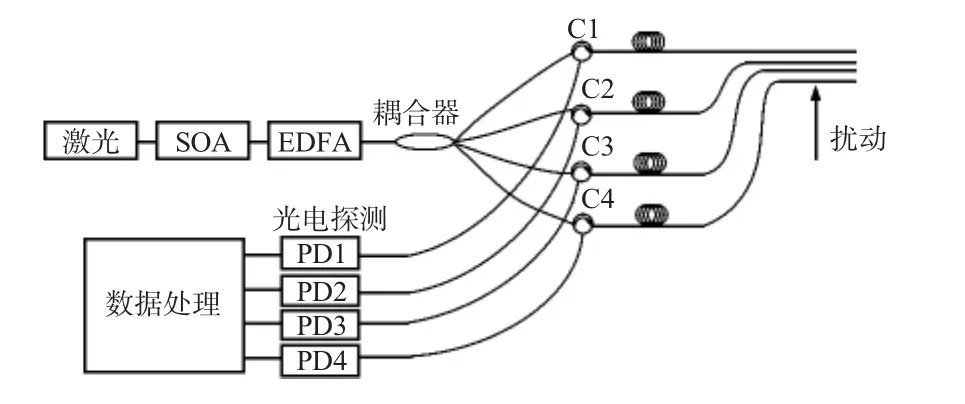
图2 多传感器实验方案原理图Fig 2 Principle diagram of multi-sensors experimental scheme
实验中每路光纤总长18 km,由一束2 km光纤与一束16 km光纤组成,中间用跳线连接,跳线捆扎在铁丝网上,通过敲击铁丝网模拟作用在跳线位置上的扰动。实验测试包含2个部分:第一部分是测试多路方案的漏报率,实验中进行了100次敲击测试,力度随机,统计单传感器和多传感器系统的报警次数,实验结果见表4。
第二部分是测试多传感器系统长时间运行过程中,对误报的抵抗效果。观测时间设定为72 h,实验期间需保证系统不受来自外界的扰动,比较单传感器和多传感器系统
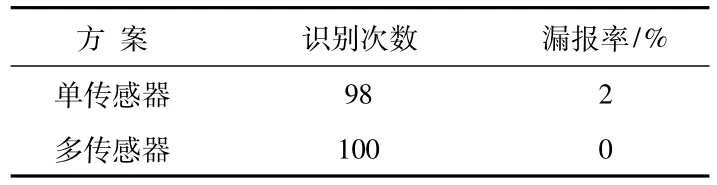
表4 漏警率实验测试结果Tab 4 Test result of leak alarm rate experiment
在72 h内的误报次数差异,实验结果见表5。
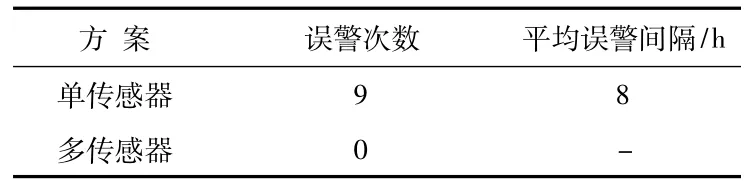
表5 误警率实验测试结果Tab 5 Text result of false alarm rate experiment
结果显示:多路方案在降低系统漏警与误警方面均显示出良好效果。
4 结论
本文提出了一种Φ—OTDR扰动传感系统的多路方案,利用多传感器信息融合的技术,改善传统Φ—OTDR传感方案的报警性能。经过仿真与实验测试,表明该方案可以有效地对漏警和误警予以剔除,大大提高了系统报警判定的可靠性。对于提高Φ—OTDR扰动传感器的应用价值具有重要的意义。
[1]Zhang Chunxi,Zhong Xiang,Li Lijing,et al.Long-distance intrusion sensor based on phase sensitivity optical time domain reflectometry[J].Infrared and Laser Engineering,2015,44(2):743-746.
[2]张韩飞,陈明,池涛,等.多传感器信息融合在温室湿度检测中的应用[J].传感器与微系统,2011,30(6):129-134.
[3]谢孔利,饶云江,冉曾令.基于大功率超窄线宽单模光纤激光器的Φ—光时域反射计光纤分布式传感系统[J].光学学报,2008,28(3):570-572.
[4]黄漫国,樊尚春,郑德智,等.多传感器数据融合技术研究进展[J].传感器与微系统,2010,29(3):5-8.
[5]王昕,张合.一致性多传感器数据融合技术在引信信息融合中的应用[J].兵工学报,2005,26(5):707-708.
[6]张军,杨子晨.多传感器数据采集系统中的数据融合研究[J].传感器与微系统,2014,33(3):52-57.
[7]叶清,吴晓平,宋业新.基于权重系数与冲突概率重新分配的证据合成方法[J].系统工程与电子技术,2006,28(7):1015-1016.
[8]刘志成,乔慧,何佳洲.基于加权证据距离的高度冲突证据组合方法[J].计算机工程与应用,2014,50(3):103-107.
[9]刘准钆,程咏梅,潘泉,等.多传感器冲突信息的加权融合算法[J].传感技术学报,2009,22(3):367-370.
[10]Jousselme A L,Grenier D,Bosse E.A new distance between two bodies of evidence[J].Information Fusion,2001,2(2):91-101.
Application of multi-sensors information fusion inΦ—OTDR system
LI Hao,YANG De-wei,LI Li-jing,ZHONG Xiang,SUN Chang-jun
(School of Instrument Science and Opto-electronics Engineering,Beijing University of Aeronautics and Astronautics,Beijing 100191,China))
Aiming at existence of false alarm and leak alarm phenomena in Φ—OTDR disturbance sensing system,a multi-sensors optical fiber system scheme is proposed.This scheme combines multi-sensors information fusion theory with the traditional Φ—OTDR system,which expands the system to multi-path scheme,then accomplish multi-path information fusion using an improved D-S evidence theory algorithm.The feasibility is confirmed by experiment,the leak alarm rate is reduced from 2%to 0;phenomena of false alarm is reduced from 9 times to 0 in 72 h.
Φ—OTDR;multi-sensors information fusion;alarm accuracy
TP212.1
A
1000—9787(2016)06—0139—03
10.13873/J.1000—9787(2016)06—0139—03
2015—09—30
李灏(1989-),男,河北辛集人,硕士研究生,主要研究方向为分布式光纤传感技术。
