多功能智能导盲手杖设计与实现
2016-08-31张仁兴
古 训,张仁兴
(贵阳学院 电子与通信工程学院,贵州 贵阳 550005)
多功能智能导盲手杖设计与实现
古 训,张仁兴
(贵阳学院 电子与通信工程学院,贵州 贵阳 550005)
导盲手杖主要用于帮助视觉有障碍的人解决行动不便问题,具有成本低、使用方便等特点。本文设计的导盲手杖,采用Arduino Mega 2560单片机作为主控芯片,具有GPS定位、短信发送、遇障报警、夜间警示行人等功能。并且各模块间体积较小,便于安装与投产,具有一定的使用价值。
Arduino单片机;导盲手杖;GPS
1 引言
随着科技的不断发展,电子产品越来越贴近人们的生活。智能车、智能机器人等行动辅具普遍存在,各具特点。在国外,技术较为发达,对行动辅具的研究取得较大进展,如日本山梨大学所设计的智能手推车在移动时能够实时检测周围的环境,对交通指示灯、人行道斑马线均有提示功能,能够正确引导盲人穿过马路[1]。在国内,导盲杖方面的研究也取得了一定的进展,如北京理工大学研发的“导盲手杖”,通过超声波检测障碍物,语音芯片告知盲人,从而实现避障功能[2]。
以上行动辅具,虽然功能完备,但是体积大,价格昂贵,难以推广使用。随着盲人数量的增加,设计一款价格低廉,使用方便,便于推广的多功能智能导盲手杖是非常有必要的。本文中设计的导盲手杖具有遇障报警、位置定位发送、LED警示等功能,体积小且成本低廉,便于投入研究与应用。
2 主要硬件简介
2.1 Arduino 单片机
Arduino单片机是一款基于Atmel AVR微处理器的开源开发板[3]。它具有体积小、易扩展等特点。其中,Arduino Mega 2560有四对串行数据通信口,丰富的I/O接口,6个外部中断源,满足本次设计的要求。如图1所示。

图1 Arduino Mega 2560单片机Fig.1 Arduino Mega 2560 Micro-controller
GPS是Global Positioning System的英文简写,即全球定位系统。目前广泛应用于防盗、行驶路线监控、车辆定位等场合,具有检测时间短、定位精度高等优点。本实验采用的是由U-blox公司在2012年推出的NEO-6M GPS,如图2所示。NEO-6M GPS的主要特点如表1所示。
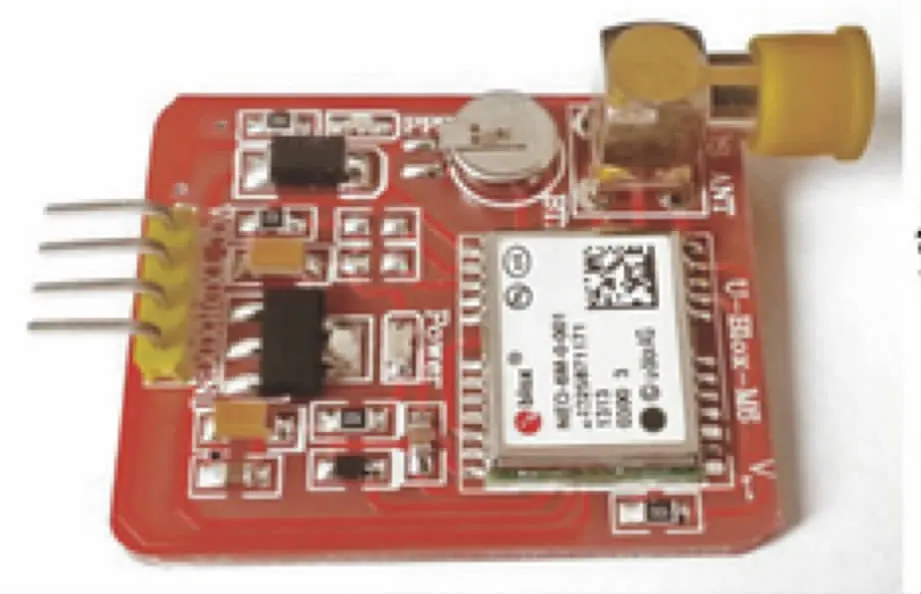
图2 NEO-6M GPS模块Fig.2 NEO-6M GPS module
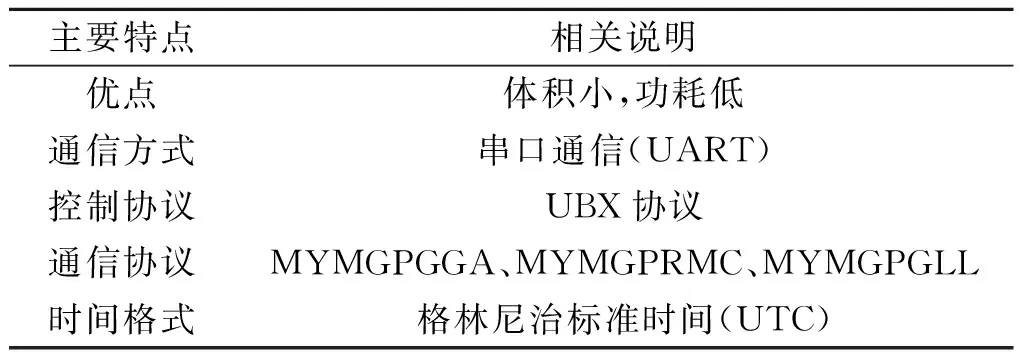
主要特点相关说明优点体积小,功耗低通信方式串口通信(UART)控制协议UBX协议通信协议MYMGPGGA、MYMGPRMC、MYMGPGLL时间格式格林尼治标准时间(UTC)
2.3 SIM900A简介
SIM900A无线通信模块主要用来实现发短信、打电话功能,采用串口(UART)AT指令与单片机进行通信。本实验主要用来发送由GPS获取的位置信息给设定的手机。实物如图3所示,使用指令如表2所示。
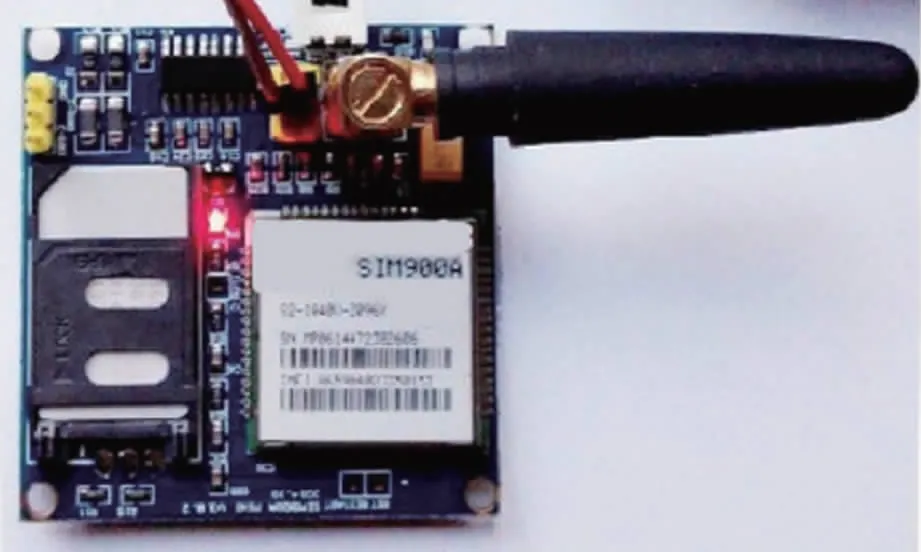
图3 SIM900A模块实物图Fig.3 SIM900A module
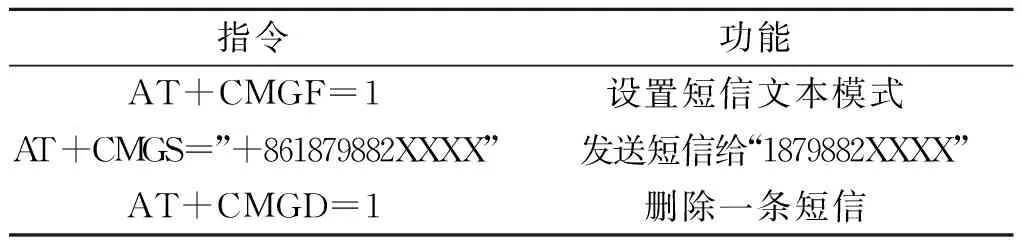
指令功能AT+CMGF=1设置短信文本模式AT+CMGS=”+861879882XXXX” 发送短信给“1879882XXXX”AT+CMGD=1删除一条短信
2.4 HC-SR04超声波传感器
超声波测距模块通过测量声波在发射后遇到障碍物反射回来的时间差,计算出发射点到障碍物的距离[4]。该模块广泛应用于测距避障、倒车提醒等场合,应用精度在厘米级范围。本实验采用HC-SR04超声波测距模块和蜂鸣器配合使用,实现在预设范围内遇障报警作用,提醒盲人小心行走。实物如图4所示,引脚说明如表3所示。
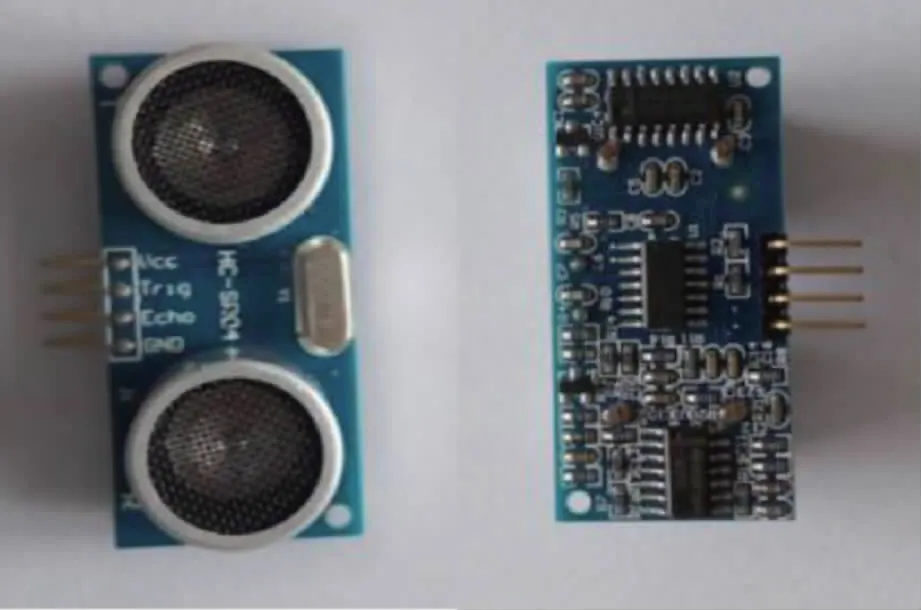
图4 HC-SR04超声波测距模块Fig.4 HC-SR04 module
引脚引脚说明VCC接电源(5V)Trig触发控制信号输入Echo回响信号输入GND接地端(共地端)
3 软件设计
在本次实验中,共采用GPS,SIM900A,超声波,蜂鸣器,光敏5个模块,其各个模块功能如下:
(1)U-Blox GPS模块,获取盲人所行走的位置信息;
我国贯彻依法治国的方针,在发展过程中,要有法律的约束,只有这样才能够确保发展过程的安全性、明确性以及清晰性。所以在林业保护与天然林保护中,相关的政府部门一方面要加大对生态保护的投入力度,为生态保护工作提供充实的后备力量,引进品质优良的树种,扩大种植的面积,优化种植地土壤,提高土地营养成分的含量,从而进一步提高森林的质量,为生态保护工作作出贡献[1]。另一方面,相关的政府部门要建立完善的法律法规,约束人们的行为习惯,让人们依照法律法规的要求进行活动,从而有效改善生态环境。
(2)SIM900A模块,盲人在出行中迷失方向时,按下导盲手杖上的按键,将GPS获取的位置信息发送到指定家人手机号码的手机上;
(3)HC-SR04超声波测距、蜂鸣器模块,检测盲人前方是否有障碍物,并通过蜂鸣器进行报警提示;
(4)光敏电阻传感器模块,检测周围环境光线亮度(能检测的光线亮度可以通过调节模块上的电位器实现)。当光线较暗时,LED灯发光,起到提示行人的作用,以免发生碰撞。
整个系统程序流程图如图5所示。

图5 主程序流程图Fig.5 Main program flow chart
其部分程序代码如下:
voidsetup(){ //程序初始化块
Module_Init(); //程序各模块初始化总函数}
voidloop(){ //主程序块
SIM900A_sending(); //发送短信的代码
Get_ultrasonic();//超声波距离测量
Dis_buzzer();//超声波报警
LED_view();//LED状态显示}
4 总体设计及调试
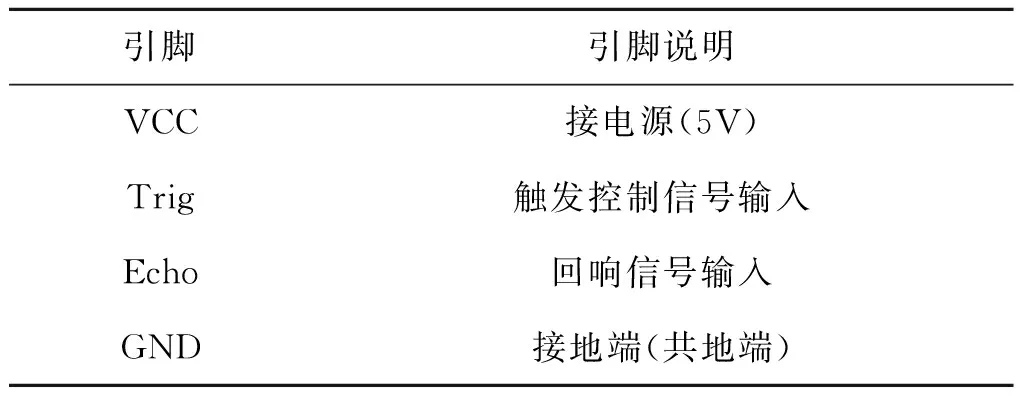
为了方便在设计过程中对电路进行修改和编写程序,本实验采用模块化设计思想,如图6所示。其中Arduino Mega 2560单片机为主控单元,整个系统包括SIM900A模块、GPS定位模块、超声波测距、蜂鸣器报警、发光二极管等。通过各模块协同工作,实现智能导盲手杖的位置定位、短信告知家人、蜂鸣器报警、LED灯警示行人等功能。
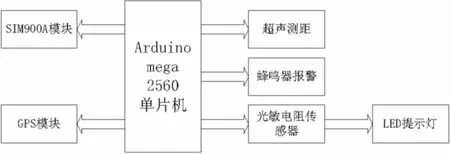
图6 导盲手杖总体设计框图Fig.6 The block diagram of Seeing-eye cane
4.1 GPS模块及短信通知功能调试分析
为避免外出的盲人走失,采用GPS对外出盲人的位置信息进行实时定位,当盲人发现自己走丢时,按下手杖上的按键,即可把位置信息通过SIM900A无线模块发送到家人的手机上,便于家人快速找到自己。其实物接线如图7所示。
同时,GPS获取位置信息功能的调试结果可以通过Arduino IDE的串口监视窗口看到,如图8所示。
为了确保GPS获取的位置信息的数据准确性,通过上网查阅测量地点的位置信息与其作对比分析,其结果如表4所示。
图7 Arduino单片机与GPS、SIM900A的实物接线图Fig.7 The writing diagram among Arudino , GPS and SIM900A
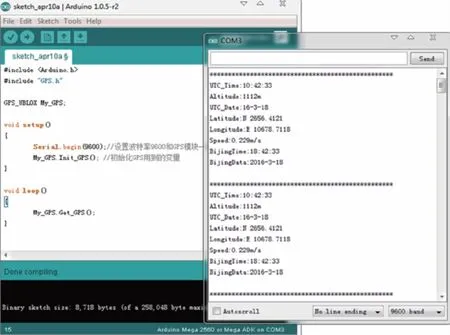
图8 GPS的调试结果Fig.8 The debugging results of GPS

被测地点经纬度被测地点地址实测经纬度实测地址E:106.787006,H:26.564032贵阳学院博技楼E:106.787118,H:26.564121贵阳学院博技楼附近E:106.781288,H:26.562704贵阳学院办公楼E:106.781208,H:26.562504贵阳学院办公楼附近E:106.782723,H:26.562557贵阳学院阳明广场E:106.782723,H:26.562528贵阳学院阳明广场附近E:106.773083,H:26.558837贵阳市市委党校E:106.773382,H:26.558957贵阳市市委党校附近
从表4看出,虽然GPS获取的位置信息和百度查询的坐标信息有差别,但误差在其允许范围内,满足智能手杖定位的需要。
随后,对手杖的位置信息发送功能进行测试。启动相应电源后,等待GPS上闪烁的指示灯由快变慢(大约为2秒闪一次,说明GPS已经开始工作),此时按下手杖上的按键,等待5秒左右,可以看到指定手机短信上有具体的位置信息。如图9所示。此时说明手杖的位置信息定位发送功能已经可以实现。
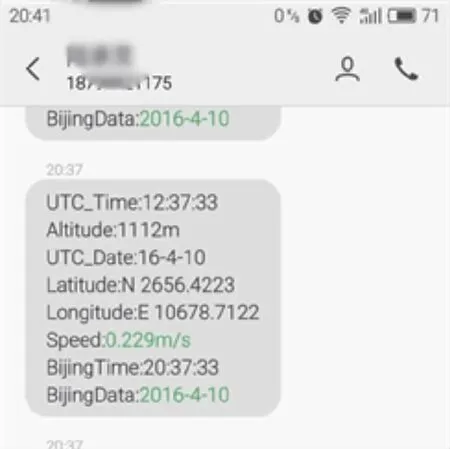
图9 GPS获取的位置信息通过 SIM900A模块发送到手机上Fig.9 The location message got from the SIM900A module
4.2 超声波测距与蜂鸣器报警功能的调试分析
导盲手杖作为盲人的行动辅具,正确判断障碍物情况是非常重要的。本次设计采用超声波测距模块和无源蜂鸣器来实现遇障报警功能。其实物接线如图10所示。
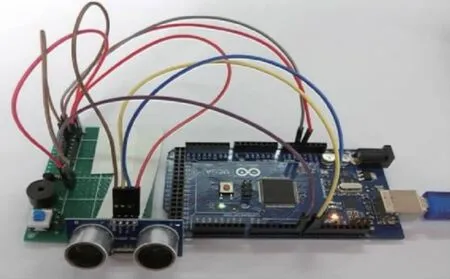
图10 Arduino单片机与超声波、蜂鸣器的接线实物图Fig.10 The writing diagram among Arudino, HC-SR04 and buzzer
根据实际情况,给蜂鸣器报警距离设定阈值(此处设定的是40cm)。当超声波测量到前方障碍物的距离小于阈值时,蜂鸣器报警,提醒使用者注意前方有障碍物,避免与障碍物相撞。表5对超声波测距数据的准确性作了相应的测试。

表5 距离对超声波测距与蜂鸣器报警的影响Tab.5 The affection of ultrasonic and buzzer for distance
另一方面,考虑到使用过程中手杖为非垂直测量,对超声波模块测量角度进行了检测,其检测结果如表6所示。
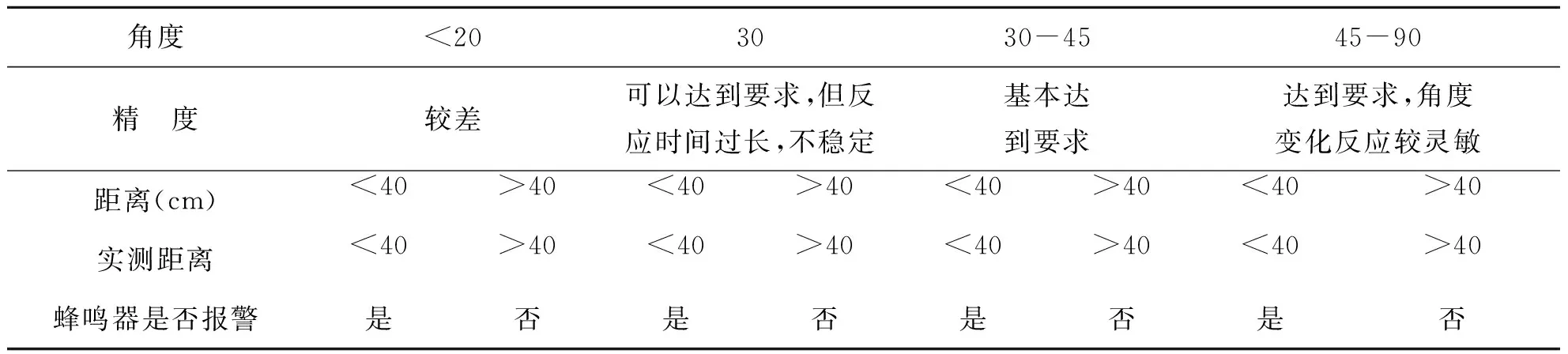
表6 角度对超声波测距与蜂鸣器报警的影响Tab.6 The affection of ultrasonic and buzzer for angle
表5可以看出,超声波所测的实际距离虽然在范围上有点误差,但是误差相对较小,并不会影响蜂鸣器工作,可以实现本次设计的基本要求。表6可以看出,当角度在45-90度之间时反应灵敏,误差也都在允许范围之内;当角度在45度以下时,反应时间较长,当然在稳定状态下也可以达到要求。但距离变动的幅度相对比较大,有时候会使蜂鸣器报警产生错误判断。
4.3 导盲手杖的总体功能测试及分析
经过前面的调试,确保各硬件的基本功能都能实现后,将其组装。如图11,图12所示。

图11 导盲手杖整体组装实物图 图12 导盲手杖整体组装的引脚接线图Fig.11 The assembly picture of the seeing-eye cane Fig.12 The writing diagram of the seeing-eye cane
5 总结与展望
本文自主设计一种低成本的智能手杖。该手杖含有位置信息定位并发送、超声波测距自动报警、LED警示灯等基本功能。实验调试结果显示,基于Arduino单片机的智能手杖较好地实现了预期的功能,同时也为后期功能的完善以及实用性验证提供了基础平台。
[1] 尚琳琳.盲人助行产品的无障碍设计研究[D].广州:广东工业大学,2012.
[2] 方仁杰.基于GPS定位与超声波导盲拐杖的设计[J].计算机测量与控制,2011,19(5):1154-1157.
[3] 程晨著.Arduino开发实战指南AVR篇[M].北京:机械工业出版社.2012.
[4]康凌.基于Arduino的超声波测距系统的设计[J].电子世界,2013(20):140-140.
Design and implementation of multi-functional intelligent guide a walking stick
Gu-xun,Zhang-Ren xing
(Guiyang college electronic and communication engineering institute,Guizhou Guiyang 550005,China)
Seeing-eye cane is mainly used to help visually impaired people to solve mobility problems, it has the characteristics of low cost, easy to use. In this paper,the seeing-eye cane based on the Arduino Mega 2560 is designed. It has the function of positioning by GPS, SMS, Obstacle alarming, warning pedestrians at night and so on. The modules involved are small, which is convenient for putting into production. It has a certain use value.
Arduino microcontroller; seeing-eye cane; GPS
2016-09-03
古 训(1988-),男,河南开封人,讲师、硕士。主要研究方向:无人直升机实时控制系统。 张仁兴(1994-),男,贵州安龙人,本科学生。主要研究方向:通信工程。
TN967.1
A
1673-6125(2016)04-0040-06
