大型运载火箭环缝焊接自动安装机的简约可靠设计
2016-08-26倪江涛张展智徐振亮ZHAOTingLIUGengNIJiangtaoZHANGZhanzhiXUZhenliang西北工业大学机电学院西安7007中国运载火箭技术研究院研究发展中心北京00076首都航天机械公司北京00076
赵 婷,刘 更,倪江涛,张展智,徐振亮ZHAO Ting, LIU Geng, NI Jiang-tao, ZHANG Zhan-zhi, XU Zhen-liang(.西北工业大学 机电学院,西安 7007;.中国运载火箭技术研究院研究发展中心,北京 00076;.首都航天机械公司,北京 00076)
大型运载火箭环缝焊接自动安装机的简约可靠设计
赵婷1,2,刘更1,倪江涛3,张展智2,徐振亮2
ZHAO Ting1,2,LIU Geng1,NI Jiang-tao3,ZHANG Zhan-zhi2,XU Zhen-liang2
(1.西北工业大学 机电学院,西安 710072;2.中国运载火箭技术研究院研究发展中心,北京 100076;3.首都航天机械公司,北京 100076)
针对新一代大型运载火箭环缝总装焊接,研究其多功能自动安装机的简约可靠性设计方案。该安装机完成5m贮箱筒段、短壳和球形底、下架托架及部分夹具的精确翻转和安装工作。提出了该大型装备的简约设计方案,此外,基于建立的整机的非线性有限元模型进行了整机刚度和强度分析,充分验证了多功能自动安装机的结构合理性和运行可靠性,从而为大型非标装备的设计提供了重要的设计思路和参考依据。
多功能自动安装机;简约;可靠;精确翻转;有限元
0 引言
自动安装设备是未来国家重大装备发展的必须装备,经过多年来的研究与开发,我国在自动安装设备方面有了很大的进步,但与国际先进水平还有一定差距[1]。随着自动安装设备的不断发展,航天、航空等领域的地面重载装配领域将成为自动安装设备应用的广阔天地[2,3]。随着计算机技术、微电子技术等的快速发展,以及重大装备的精确化、轻量化、高可靠性、灵巧性的要求,开发多功能自动安装机代替人力去从事航天领域重载装配工作具有重要意义[4,5]。
多功能自动安装机是新一代大型运载火箭环缝总装焊接装备的一个关键子装备,是一套机械化、自动化程度高、操作灵活方便且运行安全可靠的安装设备。在生产过程中,要完成5m贮箱筒段、短壳和球形底90°精确翻转,不能采用吊运装卸,同时,多功能自动安装机的采用还是提高生产效率、实现自动化生产、降低工人劳动强度的重要措施,据此,本文针对该大型装备的简约可靠的设计方案和性能分析进行了深入、系统的研究,并成功应用在了工程实际中。
1 多功能自动安装机总体简约设计方案的提出
多功能自动安装机的结构示意图如图1所示,包括行走机构、调整机构、旋转机构和夹紧机构等,来实现为沿着主床身运动的各部件安装产品及机床附件等的功能。行走机构下表面通过直线导轨与辅助床身连接,用于安装机沿辅助床身的纵向运动。调整机构主要包括底箱和立柱两部分。底箱下表面通过直线导轨与行走机构连接,用于夹紧机构的前后调整,上表面与立柱连接。立柱高4米,由两个单体立柱、横梁、丝杠和配重机构等组成。旋转机构主要用于实现夹紧机构的360°旋转运动。夹紧机构用于固定要装卸的产品和机床附件,根据不同的被夹持物选装不同的夹紧机构。多功能自动安装机的材料性能如表1所示。
1)采用模块化设计。由于需要装卸产品和机床附件等,需求较多,设计了两套夹紧机构,可根据不同的被夹持物选装不同的夹紧机构,更换灵活方便,适应能力强。
2)改变传统的下端固定、上端游动方案。由于丝杠的长径比很大,丝杠轴承的支撑方案设计为上端固定、下端游动,从而使丝杠受拉,有效地避免了丝杠的弯曲变形。
3)采用定滑轮、配重机构有效地减小了升降机构的体积和驱动力矩。
4)升降机构设计为滚轮导轨式结构,不仅便于安装和调试,而且能够避免由于直线导轨及滑块因受弯变形而卡死,进而提高其运行稳定性。

表1 材料的力学性能和物理性能
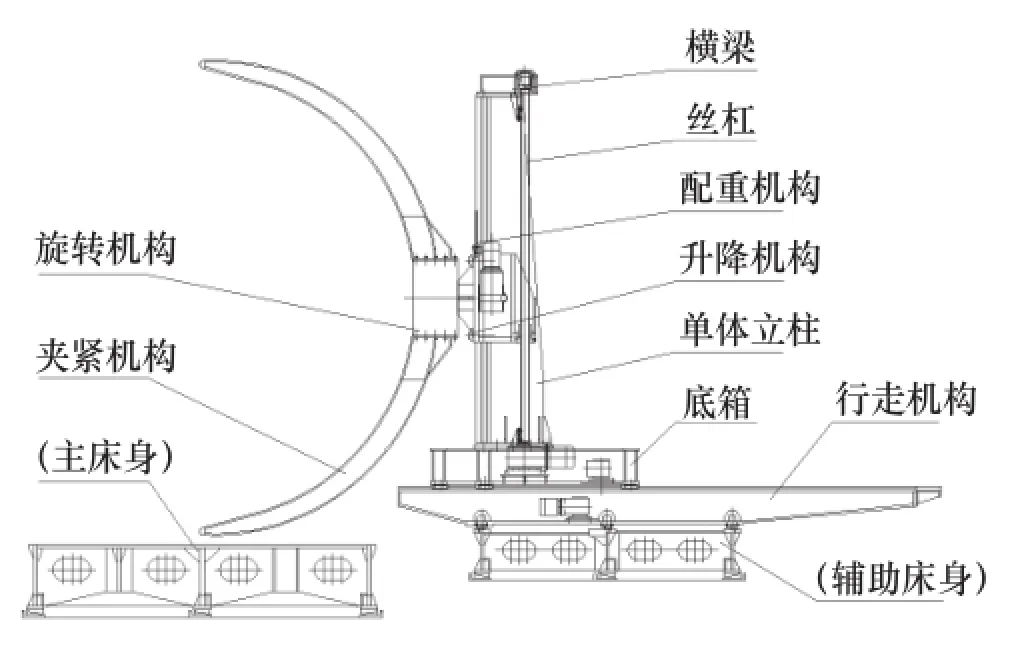
图1 多功能自动安装机的结构示意图
2 非线性整机有限元模型的建立
2.1单元划分密度的确定
划分网格是建立有限元模型的一个重要环节,所划分的网格形状对计算精度和计算规模将产生直接影响[6,7]。结合赫兹接触理论作为划分网格的依据。
根据赫兹接触理论[8],半接触宽度为:

其中:
《兰纳克》是一次寻根之旅,是一个民族主义者和小说家表达对本民族命运关切的特有方式,同时它也是一个政治讽喻,以魔幻现实主义的方式呈现了内受经济衰退困扰、外逢强权政府压制的苏格兰社会状况,它更是整个西方工业社会的写照,揭示了现代城市生活各种状况的根源。在这部具有强烈“反乌托邦”色彩的小说中,格雷以讽刺的手法表达了对个人命运的关切和对社会政治经济的不满,批判了整个西方的政治意识形态。

E1、E2和1υ、2υ 分别为圆柱体与平面的弹性模量和泊松比,R为圆柱体的半径,P为单位线长度载荷。
根据式(1)计算出接触半宽,以接触半宽的1/5作为升降机构中滚轮与导轨接触位置局部区域的单元划分长度,此时该位置的单元密度较为合理,计算结果较为准确,计算效率较高。
2.2整机有限元模型的建立
由于行走机构的末端是悬空的,因此当底箱运动到其最末端时,行走机构产生的变形最大,当夹紧机构移动到立柱最高点时,立柱的受弯变形最大,因此对底箱运动到行走机构最末端而夹紧机构移动到立柱最高点这一位置状态进行有限元分析,整机的非线性有限元模型如图2所示。
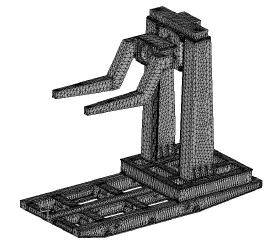
图2 多功能自动安装机的有限元模型
3 整机的有限元分析与实验测试
3.1整机的强度有限元分析
行走机构、底箱、立柱、四组滚轮组、旋转机构、夹紧机构的等效应力分布如图3所示。从图3(a)中可见,最大值为16.072MPa,发生在其与右端支撑滑块相对应的位置。从图3(b)中可见,最大值为13.294MPa,远小于材料的许用应力,发生在立柱垫板的前端,这是由于其上端各结构的重心靠近此位置造成的。从图3(c)中可见,最大值为18.006MPa,发生在立柱顶端配重机构的滑轮支座处,是由旋转机构、夹紧机构和配重块的重力造成的。从图3(d)中可见,最大值为265.916MPa,发生在右上和左下两组滚轮与导轨的接触位置,是由与导轨接触受压造成的,这四个滚轮杆上的应力值也较高。从图3(e)中可见,最大值为207.177MPa,发生在右上和左下两组滚轮的安装孔侧壁上,是由此四个滚轮杆弯曲变形后接触到孔壁造成的。从图3(f)中可见,最大值为81.765MPa,发生在夹爪根部的变截面处,是应力集中造成的。综上可见,安装机上所有关键的零部件在最恶劣工况下工作的最大等效应力均小于许用应力,强度是满足要求的,其中,四组滚轮组和旋转机构的最大等效应力较大。

图3 安装机的关键零部件的等效应力分布
3.2整机的刚度有限元分析
安装机沿垂直方向位移和旋转机构、行走机构和底箱、立柱的综合位移分布如图4所示。从图4(a)中可见,由于被夹持物的重力和丝杠对旋转机构的支持力构成的力偶、旋转机构和夹紧机构的重力和钢丝绳的拉力构成的力偶均由滚轮导轨机构来承担,因此立柱将受弯变形,而且旋转机构的滚轮与导轨的接触位置将产生弹性变形,所以夹紧机构和旋转机构随着立柱弯曲而旋转的同时还绕着滚轮导轨机构自转,因而沿垂直方向位移主要体现在夹紧机构上,最大位移量为7.445mm,发生在夹紧机构的末端。从图4(b)中可见,由于夹紧机构和旋转机构随着立柱弯曲而旋转的同时还绕着滚轮导轨机构自转,因此旋转机构的旋转中心并不在滚轮组的中间位置,而在旋转机构下方,是两个旋转趋势综合作用的结果,最大位移量为1.320mm,在其心轴末端。从图4(c)中可见,产生了绕右端支撑滑块逆时针旋转的趋势,这是由于立柱受弯矩作用引起的,最大位移量为0.060mm,在行走机构最右端,变形量很小,验证了行走机构和底箱的刚性良好。从图4(d)中可见,由于立柱受到弯矩作用,产生了绕行走机构右端支撑滑块逆时针旋转的趋势,最大位移量为0.883mm,发生在立柱顶部,由于立柱较高,则变形量相对较小,证明了立柱的刚性良好。综上可知,多功能自动安装机安装下架托架状态的刚度良好,满足设计要求,从而验证了多功能自动安装机的结构性能良好,可安全使用。
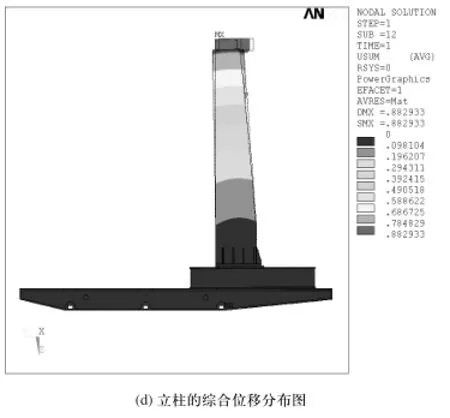
图4 安装机的关键零部件的变形分布
3.3整机的实验测试
所研发的多功能自动安装机如图5所示,通过测试,满足设计要求,具有良好的强度和刚度。最大变形量满足工程需要,变形略比计算结果稍大,最大误差小于15%,这是由于在计算中略去了一些细节和近似刚性连接造成的。综上可知,所提出的设计方案是可行的,该安装机的强度、刚度的非线性有限元分析是准确的。

图5 多功能自动安装机
4 结论
本文针对新一代大型运载火箭环缝总装焊接多功能自动安装机,完成工作如下:
1)提出了该自动安装机的总体结构方案,该多功能自动安装机包括行走机构、调整机构、旋转机构和夹紧机构等,可实现三向直线运动和一个旋转运动,完成5m贮箱筒段、短壳和球形底、下架托架及部分夹具的精确翻转和安装工作。
2)建立了该自动安装机的整机的非线性有限元分析,考虑了关键零部件中的非线性接触关系,并基于赫兹接触理论给出了单元划分准则,对整机进行了较为经济的有限元单元的划分,有效地提高了计算精度和计算效率。
【】【】
3)基于建立的非线性有限元模型,对该自动安装机进行了强度和刚度分析,计算结果通过实际测试,有效地验证了计算结果的准确性。
本研究为灵巧大型装备的设计提供了重要的实践依据。
[1] 郭瑞,刘振国,曹云翔,等.基于视觉的装配机器人精确定位研究[J].制造业自动化,2014,36(5):154-158.
[2] 许家忠,王东野,蔡浩田,等.大伸臂重载装配机器人[J].自动化技术与应用,2012,31(6):1-4.
[3] 纪爱敏.起重机伸缩吊臂局部稳定性的有限元分析[J].农业机械学报,2004(6):48-51.
[4] 刘敏,尤波,絮延河.平面关节型装配机器人控制系统的开发[J].黑龙江电力,2004(6):190-193.
[5] 孙学俭,于国辉,周文乔,等.对世界工业机器人发展特点的分析[J].机器人技术与应用,2002(3):8-9.
[6] 何江华.计算机仿真导论[M].北京:科学出版社,2001.
[7] 陈精一.电脑辅助工程分析—ANSYS使用指南[M].北京:中国铁道出版社,2001.
[8] K.L.Johnson.接触力学[M].徐秉业,等译.北京:高等教育出版社,1992.
Simple and reliable design and performance of the automatic installing machine for the circumferential seam welding of large launch vehicle
TH12
A
1009-0134(2016)06-0040-04
2016-03-27
国家自然科学基金项目(51275423)
赵婷(1980 -),女,天津人,高级工程师,博士研究生,研究方向为飞行器结构设计和结构可靠性等。