基于PLC控制RFID识别的图书分类系统
2016-08-26甄圣超李玉康谢天海ZHENShengchaoGAOYuanLIYukangYUJieXIETianhai合肥工业大学机械与汽车工程学院合肥230009
甄圣超,高 远,李玉康,余 杰,谢天海ZHEN Sheng-chao, GAO Yuan, LI Yu-kang, YU Jie, XIE Tian-hai(合肥工业大学 机械与汽车工程学院,合肥 230009)
基于PLC控制RFID识别的图书分类系统
甄圣超,高远,李玉康,余杰,谢天海
ZHEN Sheng-chao,GAO Yuan,LI Yu-kang,YU Jie,XIE Tian-hai
(合肥工业大学 机械与汽车工程学院,合肥 230009)
针对当前图书归还需要大量人工和时间这一问题进行研究,本图书分类排序系统将线性电机模组与多自由度机械臂的配合通过PLC结合。采用三菱公司的FX-2N系列PLC作为核心控制器,从硬件方面进行设计,完成了在机械臂中硬件连接、I/O点分配、线性电机控制,并通过红外传感器、RFID等技术对书本进行准确有效识别,达到实现图书识别、还书、自主分类归位整理的作用,极大节约人力、时间,提高效率,实现自动化和智能化。
PLC;RFID识别;多自由度机械臂;自动分类
0 引言
当前图书馆已经可以利用RFID无线射频进行借还书识别,但图书借还后,每次依靠大量人力时间将其排序、整理和归位,并且人工书籍归位极有可能出现错置情况,对后期借还书造成一定影响。随着工业快速发展,多自由度机械臂已在工业中被广泛应用,以实现生产的机械化和自动化[1];RFID即无线射频识别技术,是非接触式自动识别技术的一种。与光电原理的传统条形码不同,RFID标签无需人工操作,而是使用无线频率通信进行自动识别、追踪和管理;PLC(可编程控制器)是以中央处理器为核心,综合了计算机和自动控制等先进技术,具有可靠性高、功能完善、组合灵活、编程简单和功耗低等特点,已经成为目前在机械手控制系统中使用最多的控制方式[2]。本文提供一种基于PLC控制和RFID识别的图书分类排序系统,以三菱的FX-2N系列PLC作为核心控制器,实现对线性电机、机械臂和RFID控制的功能,实现一精确自动控制图书分类排序系统[3]。
1 系统工作原理

图1 系统流程示意图
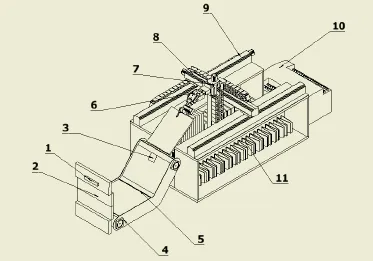
图2 系统具体结构示意图
1.1流程解析
本文的研究主要是图书识别自动排序归位系统。该系统流程示意图如图1所示,系统结构布局如图2所示。
当红外感应器探测到有书进入时,将脉冲信号传给主控器,主控器判断后通知书槽马达运行,打开书槽门,书放入传送带,利用其坡度将书本细化成一本排列在传送带上,红外感应器识别书本同时,其指令传输给PLC,同时PLC输出指令控制传送带伺服电机转动,将书本输送至机械臂口,在图书经过RFID读写器时,其标签信号被读取录入PLC的数据寄存器中,启动相应的位置定位程序即每个书夹都有相对应的书签信息。当书移动至机械手光电对射开关识别时,自动闭合机械手,将书抓起同时当光电开关闭合之后录入的信号经A/D转换录入PLC,此时PLC输出控制三轴龙门线性电机进行运转并且传送带伺服电机同时停止,精确定位将录入图书信号送至对应的书架位置。之后再控制机械手上舵机工作,利用机械臂三自由度运动,将图书送至指定书夹中。
1.2识别系统
识别系统主要由红外感应器、传送带和RFID三个部分组合而成,解决图书以单本为单位依次识别录入系统,感应器识别图书之后,将脉冲信号传给书槽门马达主控器,进而驱动马达打开书槽门;同时将其指令传输给PLC,控制传送带伺服电机转动。根据系统要求选用松下NACS83462红外线传感器。
传送带是识别系统重要一环,传送带转动将书本输送至机械臂口,经过RFID读写器时,其标签信号被读取录入PLC的数据寄存器中,启动相应位置定位程序。传送带尺寸总水平长500mm,高300mm,宽300mm,在传送带上每隔一段距离300mm安放一块隔板(板高2mm),用来防止书本在传送带斜面上运输时摩擦不够而下滑,同时可以利用坡度有效解决多书同时放入单本识别的问题。选用型号 DK-1500的传送带,电机利用减速马达,功率60W,较适合,输送速度可达1~20米/分钟,达到高效率自动还书。
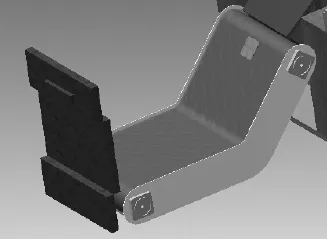
图3 Inventor建模的识别系统模型
RFID识别录入数据是整个系统图书定位程序的关键,包含系统设置中心与系统控制中心,并且共用数据库具有RFID读写器和天线的RFID识别系统,利用RS232串口与PLC编程口相连。书本在经过传输机构输出端的RFID识别机构时,处在读写器的超高频Ultra High Frequency(UHF)RFID陶瓷天线范围内,使得带有分类信息的书本标签被激活而将其所含信息通过编码的方式传送给RFID读写器,进而RFID读写器将信息传送给PLC控制器。
1.3排序结构
排序结构主要由机械臂和线性电机模组两个部分组成,图书标签的定位信息录入PLC的数据寄存系统中后,当对射光电开关识别到图书时,PLC输出控制排序结构启动相应的定位程序将图书送到指定书夹,从而达到间接排序分类归位的目的。
1.3.1机械手的结构设计
本文设计的机械臂由PLC来控制机械手上舵机的工作,从而实现机械手的三自由度运动[6],将图书送至指定的书夹中要有三个自由度:yz平面转动、y轴旋转、夹持运动,分别由三个电机控制,其中机械手部分采用两指式,其结构如图4所示。

图4 舵机结构示意图
对射光电开关置于机械手前端,用于当书移动至距机械手适当距离,自动闭合机械手,将书夹起;同时光电开关闭合之后产生的信号经A/D转换录入PLC从而使得PLC输出相应的定位程序。机械爪:机械爪上舵机的旋转带动爪上的齿轮旋转,从而实现机械手对书本的夹紧和松开。舵机集成了直流电机、电机控制器和减速器等,并封装在一个便于安装的外壳里的伺服单元。能够利用简单的输入信号比较精确的转动给定角度的电机系统。舵机安装了一个电位器(或其他角度传感器)检测输出轴转动角度,控制板根据电位器的信息能比较精确的控制和保持输出轴的角度。
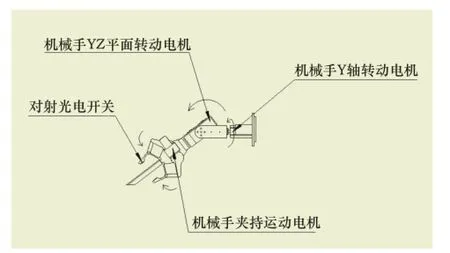
图5 机械臂结构示意图
机械手详细参数:
材质:全铝合金;质量:约68g(不含电机);最大张角:55mm(最大张角间距55mm);
整体长度:108mm(爪子闭合时的整体最长长度);整体宽度:98mm(爪子张开时的最大整体宽度)。
舵机的主体结构如图5所示,主要组成部分有外壳、减速齿轮组、电机、电位器和控制电路。简单的工作原理是控制电路接收信号源的控制信号,并驱动电机转动;齿轮组将电机的速度成大倍数缩小,并将电机的输出扭矩放大响应倍数,然后输出;电位器和齿轮组的末级一起转动,测量舵机轴转动角度;电路板检测并根据电位器判断舵机转动角度,然后控制舵机转动到目标角度或保持在目标角度。
1.3.2线性模组的设计
本文的线性模组是三轴龙门线性电机,具有结构简单、高硬度及高精度可排除机械冲击、检测控制方面的误差及延迟等干扰因素,并能通过全封闭控制缩短定位时间、提高定位精度。当PLC输出定位程序时,机械手夹持书本,如图2所示,通过三轴xyz线性电机的运转将图书送到指定书夹。
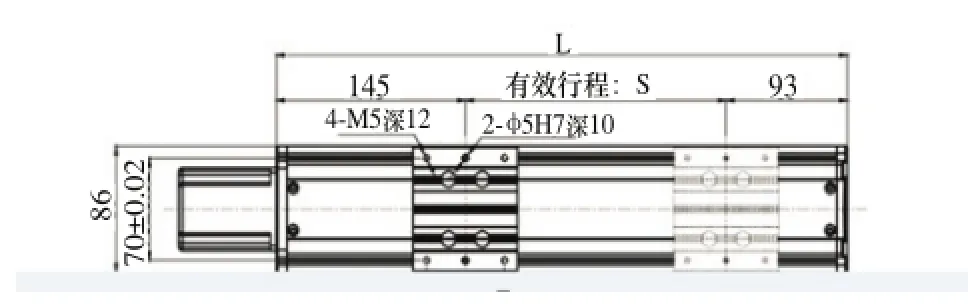
图6 电机直连外置滑台示意图
1.3.3书夹设计
机械臂将书从图示方向送入书夹中,我们设想较厚的书本厚度有35mm,那么书夹中部张开宽度至少为36mm,书夹均匀设置在书架上,且书夹设为以书夹转轴为固定轴、可绕书夹转轴转动的呈V字型的合页,合页的远离书夹转轴的一端设置有控制合页开口大小的压缩弹簧,使其便于根据书本厚度自发调节合页开口大小,此外,书夹的高度为书高的2/5~3/5,从而达到夹书和固定书本的目的。

图7 Inventor建模的书夹设计示意意图
2 PLC选型及控制设计
考虑逻辑上的清晰与条理性,下面分块编程[8]:
程序一:红外传感器识别输入信号,导出书槽门打开、传送带电机运转,当书碰到对射开关识别时,机械手夹紧,传送带电机停止运转。
程序二:书经过RFID读写器时,其标签信号被读取录入PLC的数据寄存器中,启动相应的位置定位程序即每个书夹都有相对应的书签信息。
位置定位程序即为程序二的子程序,先定开始位置为机械原点,先启动线性模组x轴到达书夹x方向位置,之后分别运行z轴使其到达书夹外,机械臂yz平面自由度开始转动使书本竖直(如识别在书夹另一侧,先进行y轴方向转动)在运行y轴线性电机将书送入书夹口,直至y轴最大路程(考虑舵机与y轴平台的偏差)。
程序三:张开机械手,平台沿y方向退出至中间原点,闭合机械手再沿y方向进入(利用闭合的机械手将书本完全推入书夹中)之后快速退出回到机械原点,此时传送带开启再起运转。
综上原则,选用三菱FX-2 n48mr的PLC[4,5]。
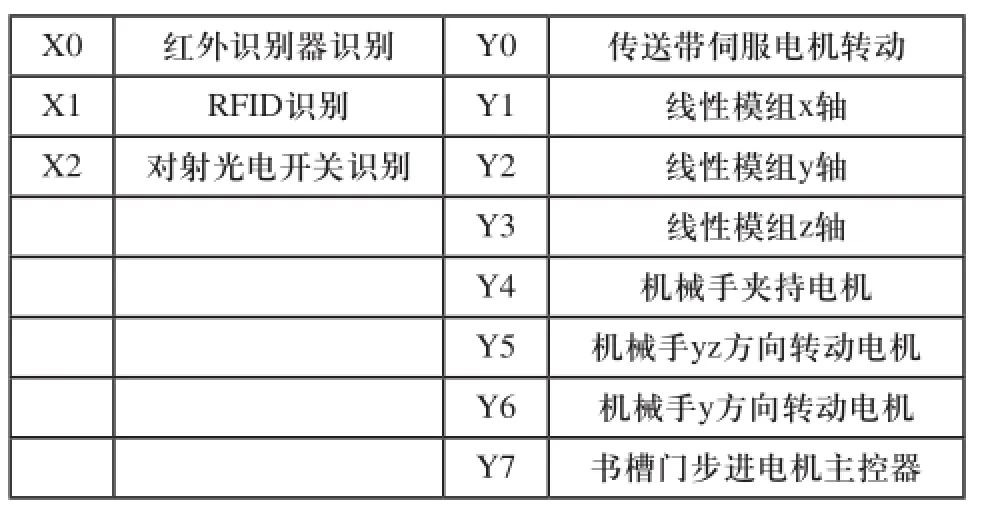
表1 I/O分配表
3 结论
本文分析现有图书分类排序技术的不足,提供了一种基于PLC控制和RFID识别的图书分类系统设计,从系统的识别系统、排序结构、PLC控制程序等方面对该设计进行了较为深入的研究和阐述,首先从工作流程、硬件的选型和设计介绍识别系统部分;从机械臂的原型设计到线性电机模组的选型和书夹的设计对排序结构进行了系统的分析,最后对及其功能模块进行了选型,并I/ O对接口进行了配置。通过研究可以将杂乱无章的图书进行准确的分类,提升图书馆的管理效率,使图书馆理工作更加规范化、系统化、程序化。
[1] 乔东凯.基于PLC和触摸屏的物料自动分拣系统的电气化[J].广东:机床与液压,2014,42(2):106-109.
[2] 葛锁良,张瑞祥.基于PLC的4色平台式丝网印刷机控制系统设计 [J].合肥工业大学学报(自然科学版),2013,36(8):106-109.
[3] 李璇.基于台达的自动分拣系统的设计与实现[J].变频器界,2015(1):87-93.
[4] 王康康.基于PLC的立体车库下行通道控制系统的设计研究[J].西安:无线互联科技,2014(9):79-80.
[5] 刘春林,史斐娜.基于PLC的搬运机械手硬件系统设计[J]. PLC&FA,2014(8):75-80.
[6] 关明,周希伦,马立静,等.基于PLC的机械手控制系统设计[J].制造业自动化,2012,34(7):120-122.
[7] 付伟.PLC在材料自动分拣系统中的应用[J].制造业自动化,2012,34(3):136-138.
[8] 罗志勇,罗萍,周立芳.PLC工程实例详解[M].北京:人民邮电出版社,2012:1-27.
Library classification system identification based on programmable logic controller (PLC) control the radio frequency identification (RFID)
TP271.4
A
1009-0134(2016)06-0153-03
2016-03-14
安徽省自然科学基金面上资助项目(1508085SME221)
甄圣超(1988 -),男,安徽合肥人,讲师,博士,研究方向为机械系统动力学及不确定系统控制方法。