基于DSP的Stewart平台直流无刷电机伺服控制系统
2016-08-25朱明超
霍 琦,朱明超,李 昂,韩 康
(中国科学院长春光学精密机械与物理研究所 空间机器人工程中心,吉林 长春 130033)
基于DSP的Stewart平台直流无刷电机伺服控制系统
霍琦,朱明超,李昂,韩康
(中国科学院长春光学精密机械与物理研究所 空间机器人工程中心,吉林 长春130033)
针对Stewart平台精确定位控制的要求,设计了一种基于DSP技术的伺服控制系统,以直流无刷电机(BLDC)作为驱动装置。重点给出了Stewart平台伺服控制系统的原理,直流无刷电机控制器硬件及软件的设计与实现。实验结果表明该基于DSP的Stewart平台直流无刷电机伺服控制系统具有良好的稳定性,并且具有高精度的定位控制能力。
Stewart平台;DSP;直流无刷电机;伺服控制
Stewart平台是一类具有高精度、高稳定性的精确定位控制设备,其伺服控制系统的精度决定Stewart平台的性能。直流无刷电机既有交流电机结构简单、运行可靠及便于维护等优点,又具有直流有刷电机运行效率高、无励磁损耗及调速性能好等优点,并克服了有刷电机因机械电刷和换向器所引起的噪声干扰、火花及维修等缺点,且降低了成本,因此在工业控制中得到了广泛的应用[1-4]。要实现Stewart平台伺服控制系统的高精度需求,对控制器的运算能力有一定的要求,因此采用德州仪器公司的TMS320F28335数字信号处理器作为控制器,采用Allegro公司的A3930芯片作为驱动器,并应用于Stewart平台伺服控制系统中。文中主要介绍了应用DSP数字信号处理器设计直流无刷电机伺服控制系统,实验结果表明,伺服控制系统具有良好的精密定位能力,且具有较强的实时性、鲁棒性和动特性。
1 Stewart平台伺服控制系统原理
伺服控制系统是用来精确地跟随或复现某个过程的反馈控制系统,一般情况下,伺服控制系统的输出量是机械位移或位移速度、加速度等,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)[5-8]。该Stewart平台直流无刷电机伺服控制系统采用电流、速度和位置三闭环控制回路设计。如图1所示,为直流无刷电机伺服控制系统框图。
由图1可以得出,直流无刷电机电流环通过采样电阻检测得到相电流,将相电流输入到TMS320F28335数字处理器的A/D模块上,并与速度环输出的参考值作比较,以进行力矩控制;伺服控制系统的速度环通过增量式光电编码器,运用M/T测速方法检测速度,将速度值输入到TMS320F28335数字处理器的QEP模块上,并与位置环输出的参考值作比较,以进行速度控制;伺服控制系统的位置环通过增量式光电编码器检测位置,将位置信息输入到TMS320F28335数字处理器的QEP模块上,并与输入的参考位置作比较以进行精确位置控制[9-12]。
2 系统硬件设计
Stewart平台直流无刷电机伺服控制系统由BLDC控制器模块、驱动器模块、编码器模块及电源模块组成。如图2所示。
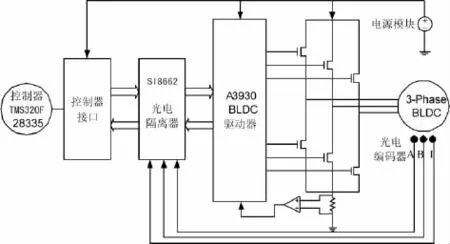
图2 系统硬件结构图
2.1BLDC控制器模块
BLDC控制器模块采用美国德州仪器公司的DSP数字处理器TMS320F28335实现,它是32位浮点处理器,主频是150MHz,主要运用在电机控制、电力设备控制及工业控制上。其片上资源丰富,如256K×16位的FLASH,34K×16位的SRAM,8K×16位的BOOT ROM,2K×16位的OPT ROM,18路PWM,6路HRPWM,6路CAP,2通道QEP,12位的2×8通道ADC,3通道SCI,2通道MCBPS,2通道CAN,1通道SPI,1通道I2C,外部存储器扩展接口XINTF,88个通用输入/输出I/O接口及看门狗电路等。
2.2驱动器模块
驱动器模块采用Allegro公司的A3930芯片,它是一款用于直流无刷电机控制及MOSFET桥路驱动的芯片,该芯片具有良好的同步性能、输入电压范围宽和低电流休眠等优点,通过隔离单元与BLDC控制器模块连接,同时接收霍尔信号,另一端是三相电桥单元,直接驱动运动。
2.3编码器模块
编码器模块是给直流无刷电机伺服控制系统提供速度和位置信号的部分,该设计运用增量式光电编码器。在增量式光电编码器的码盘上有开孔,两端装有光电发送和接收装置,在旋转过程中能够产生通断变化,从而得到相应的脉冲信号,根据脉冲信号QEPA和QEPB的相位关系可以判定码盘的旋转方向,根据脉冲索引信号QEPI可以判定码盘的绝对位置。该设计速度检测采用M/T法,该方法综合了M法和T法的优点,属于全速测速方法。
2.4电源模块
电源模块是直流无刷电机伺服控制系统正常运行的基石,外部输入电压为24 V,可直接给三相电桥供电,其他所需电压可以通过DC-DC单元转换,如5 V、3.3 V等。
3 系统软件设计
实现Stewart平台直流无刷电机伺服控制的软件采用C语言编程,在TI公司的嵌入式处理器集成开发环境CCS5上实现。控制软件不仅包括直流无刷电机的驱动程序,还要包括与上位机通讯、运行过程中电机参数的监控等辅助程序[13-14]。整个控制系统软件由主程序和中断服务子程序组成。

图3 主程序流程图
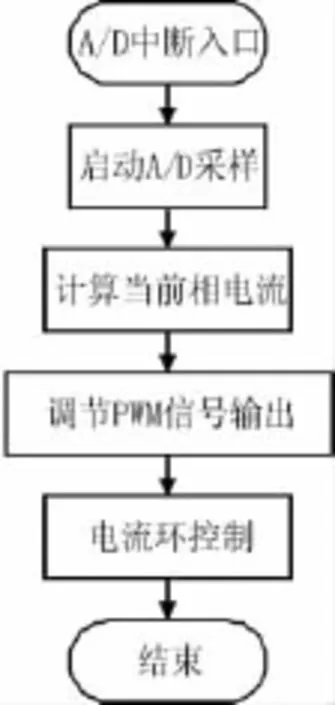
图4A/D中断服务程序
主程序完成系统初始化、系统参数设定、初始化中断子程序及循环等待等任务,如图3所示。
中断服务子程序包括A/D中断和定时器中断。A/D中断主要用于检测采样电阻的电压值,并计算得到当前相电流值,进行电流环的调节以控制PWM信号的输出,如图4所示。定时器中断主要用于设定目标位置,检测增量式光电编码器的脉冲数并计算当前速度及当前位置,当前位置与目标位置作比较,差值送入位置控制器进行位置调节,位置控制器的输出值与当前速度值作比较,差值送入速度控制器进行速度调节[15]。如图5所示。

图5 定时器中断服务程序
4 实验与结果分析
为验证本文设计的Stewart平台直流无刷电机伺服控制系统的性能,进行了Stewart平台的单腿试验,该实验采用瑞士maxon公司EC系列直流无刷电机,后置1000线的增量式光电编码器和霍尔位置传感器,软件采用C语言在TI公司的嵌入式处理器集成开发环境CCS5上实现,直流无刷电机伺服控制系统电流环的采样频率是15 kHz,速度环采样频率是1 kHz,位置环的采样频率是100 Hz,目标位置为幅值0.2、频率5 Hz和偏置0.4的正弦函数。图6为Stewart平台的单腿试验实物图,图7为直流无刷电机伺服控制系统位置跟踪图。

图6 Steward平台单腿实验
由图7直流无刷电机伺服控制系统位置跟踪实验图可以看出,横坐标是时间,纵坐标是位移量,通道1是伺服控制系统位置输出值,通道2是伺服控制系统位置参考值,通道1的数据能够很好的复现通道2的数据,因此本论文所设计的Stewart平台直流无刷电机伺服控制系统能够很好进行电流环、速度环的控制,并具有良好的位置跟踪能力。

图7 伺服控制系统位置跟踪
5 结 论
文中通过分析伺服控制系统原理,结合DSP技术建立起Stewart平台直流无刷电机伺服控制系统,并进行电流、速度和位置的三闭环回路控制。实验结果表明该伺服控制系统能够准确的测量电机转速,并具有精确的位置跟踪能力。
[1]徐惠,肖功海,亓洪兴.基于CompactRIO的直流无刷电机控制系统[J].电子设计工程,2011(6):129-131.
[2]李建飞,郝桂青.基于MC9S12D64单片机的直流无刷电机控制系统设计[J].电子设计工程,2010(12):102-104.
[3]陈伟,周小波,王群京.基于模糊优化的PID直流无刷电机控制[J].电子设计工程,2010(6):146-149.
[4]游志宇,杜杨,张洪,等.基于场效应管的直流电机驱动控制电路设计[J].国外电子元器件,2008(2):3-6.
[5]王秀霞,刘南,邓遵义.基于DSP56F805的直流无刷电机控制系统设计[J].国外电子元器件,2006(12):20-24.
[6]刘义艳,段晨东,赵学风,等.ATmega162在无位置传感器两相直流无刷电机控制等多种系统中的应用[J].国外电子元器件,2006(8):12-15.
[7]张从鹏,邢庆辉.基于ARM Cortex-M4的永磁无刷直流调速系统设计[J].微特电机,2016(1):90-92.
[8]周晓华,李振强,刘胜永.无刷直流电机神经元变结构PID调速系统研究[J].电机与控制应用,2016(1):12-16.
[9]乔维德.基于模糊PI控制的BLDCM直接转矩控制[J].微特电机,2015(11):60-63.
[10]张慧,李杰,秦丽,等.基于DSP的无刷直流伺服电动机模拟控制设计[J].微特电机,2015(11):86-89.
[11]方炜,张辉,刘晓东.无刷直流电机双闭环控制系统的设计[J].电源学报,2014(3):35-42.
[12]张勇,程小华.无刷直流电机与永磁同步电机的比较研究[J].微电机,2014(4):86-89.
[13]刘慧博,王静,吴彦合.无刷直流电机模糊自适应PID控制研究与仿真[J].控制工程,2014(7):583-587.
[14]吴大勇,贾敏智.STM32在三相无刷直流电机控制系统中的应用[J].微电机,2014(3):47-51.
[15]段丽娜,赵金.基于DSP的无刷直流电机控制系统的研究[J].微电机,2014(3):60-63.
Brushless DC motor servo control system of the Stewart platform based on DSP
HUO Qi,ZHU Ming-chao,LI Ang,HAN Kang
(Space Robot Engineering Center,Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Science,Changchun 130033,China)
Aiming at the accurate location control requirements of Stewart platform,a control system based on DSP technology is designed in this article,which uses brushless dc motor(BLDC)motors as driving device.This article elaborates the principle of Stewart platform servo control system,the design and implementation of brushless dc motor controller hardware and software.The experimental results demonstrate that the high precision positioning control ability and good stability of Stewart platform brushless dc motor servo control system based on DSP.
Stewart platform;DSP;brushless DC motor;servo control
TP33
A
1674-6236(2016)14-0146-03
2016-02-24稿件编号:201602123
国家自然科学基金(11302222);中国科学院长春光学精密机械与物理研究所创新基金(Y4CX1SS141)
霍 琦(1988—),男,山东菏泽人,硕士,研究实习员。研究方向:机器人动力学与控制。
