船舶坞排维修作业平台的设计
2016-08-24綦化乐陈亚东
李 雪,綦化乐,陈亚东,顾 因,孙 峥
(镇江船艇学院,江苏 镇江 212003)
船舶坞排维修作业平台的设计
李雪,綦化乐,陈亚东,顾因,孙峥
(镇江船艇学院,江苏 镇江 212003)
针对目前船舶维修作业缺乏制式登高作业装置的问题,设计一种适合船舶坞排维修的作业平台,利用全回转驱动行走装置和三门架对置升降机构实现平台的原地全方位转向、行走及工作台面的升降。该平台具有便捷、高效和安全等优点,能够满足坞排维修作业需要。
坞排维修作业平台;三门架;普通轮
目前国内、外船舶坞排维修登高作业设备主要有脚手架、吊篮或轮式折臂起重机等。其中,脚手架搭建繁琐,攀爬困难,高度调节不便;吊篮操作要求高,作业安全性差;轮式折臂起重机成本高,作业场地受限,不能多人同时作业。针对这种现状设计船舶坞排维修作业平台(以下简称作业平台)。
1 整机结构和工作原理
作业平台主要由底座、三级门架、工作平台、液压支腿、驱动轮、液压系统及电气控制系统等组成[1],结构见图1,技术参数见表1。

图1 船舶坞排维修作业平台结构示意
作业平台的升降机构由2个对置的3级门架构成,2个载人工作平台分别安装在2个对置的3级门架上,每个工作台既可以独立运行,也可以通过螺旋传动机构将连接板搭接在一起,实现组合运行,有效满足器材设备携运、作业空间拓展的现实需求[2]。平台工作时,首先将位于平台4个角落上的液压支腿展开。3级门架的升降和液压支腿的收放是通过液压系统实现的,其控制可通过操作平台底座上的下控制柜或安装在工作平台上的控制箱来完成。作业平台的整体位置移动由可180°回转的驱动轮实现[3]。由程序控制器控制驱动轮的前后直线行走、行进中的转弯和横移(通过驱动轮原地90°转向实现横移)。
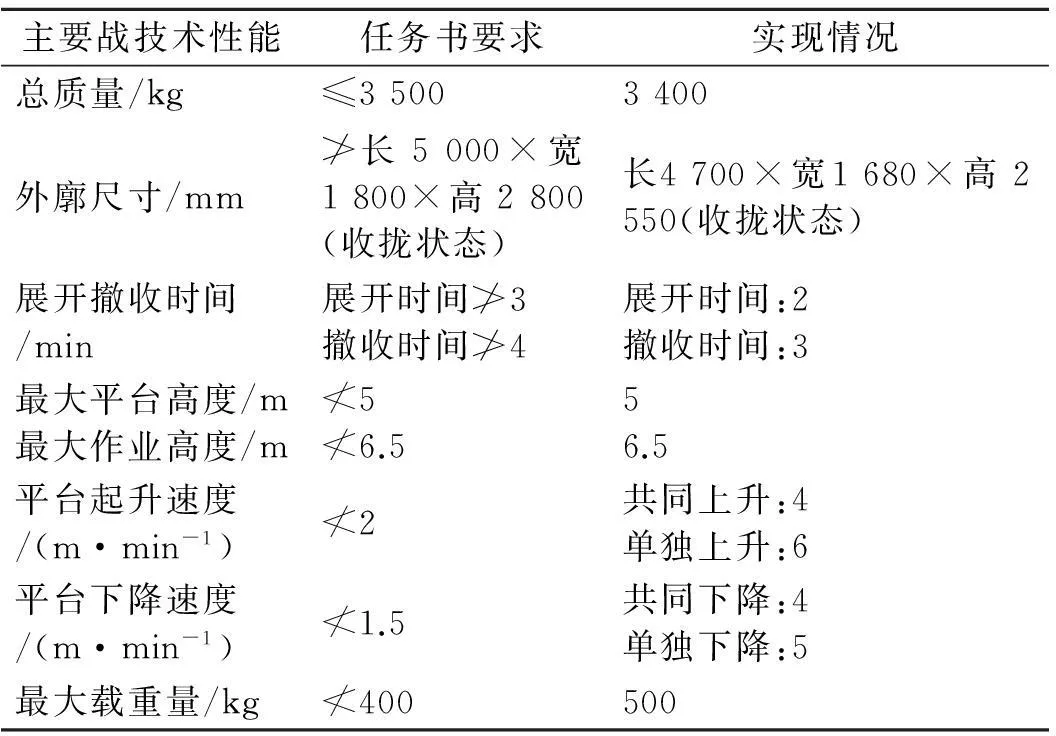
表1 作业平台性能参数
2 关键部件设计
2.13级门架
门架是平台的重要组成部分,其作用是带动其上连接工作平台的升降。门架由内、中和外3节组成[4]。工作平台和内架上的各滚轮组分别安放在内架和外架立柱的槽内,滚轮组构成工作平台,内架、中架和外架相互之间的活动联系,起传力和导向作用。
如图2所示,工作平台挂在工作平台横梁上;工作平台受起升链条的牵引,并以其纵、侧向滚轮为“车轮”,以内门架为“活动导轨”作升降运动;内门架则受起升液压缸的顶推,也以其纵、侧向滚轮为“车轮”,以外门架2为“固定导轨”而升降;外门架的下铰座铰接在驱动桥壳或车架上,上端顶在一个浮动横梁上,自由提升结束后即与内门架上横梁重叠[5]。起升链条的一端固定在起升液压缸筒上(相当于固定在外门架上),中部绕过固定在浮动横梁上的链轮后,另一端挂住工作平台。
2.2液压系统
液压系统除油箱及其管路外,由工作油泵和电机作为动力元件,多路换向阀,限速阀等作为控制元件,油缸作为执行元件[6],见图3。

图2 平台门架结构
液压系统执行元件主要可分为两部分:平台起升油缸、支腿油缸。油泵输出的压力油分别进入到工作装置和支腿操纵机构,通过前后倾手柄使多路换向阀的滑阀移动以改变液压油的流动方向,从而控制平台起升油缸与门架支腿油缸,实现平台的升降和支腿的伸缩[7]。最后油液将再度重返油箱,如此不断循环,液压系统是平台工作过程中的重要环节[8]。
2.3全回转驱动轮
2.3.1控制方式
驱动轮采用普通轮,其全回方位回转控制采用一个工程机械控制器作为主控器,主控器采用CAN2.0B网络控制方式,与2台驱动控制器通讯控制,将速度命令、制动命令、启动命令、停止命令等发给AC-S2驱动控制器,差速驱动控制见图4[9]。
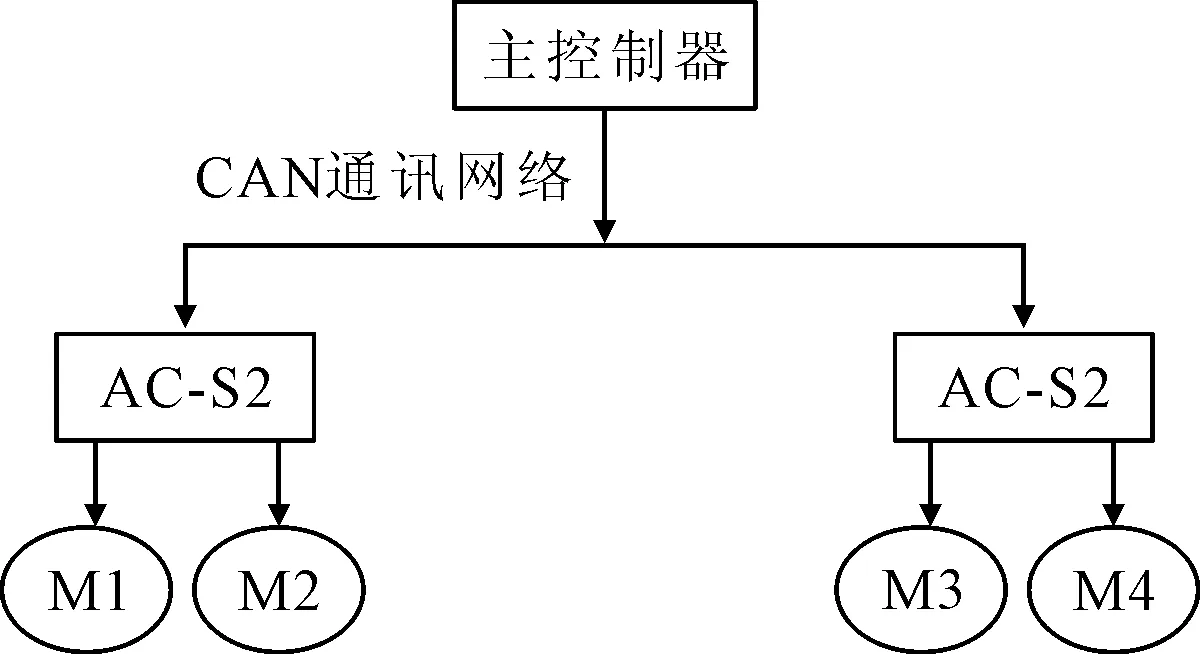
图4 差速驱动控制示意
采用遥控器方式,遥控器设置2个遥杆,如图5所示。一个横向拨动,一个竖向拨动,横向表示转弯,往左边拨动即左边转弯,右边拨动即右边转弯,拨得越多,转弯角度越大。竖向拨动表示速度控制,往前拨动表示前进,越往前拨,往后拨动表示后退,拨得越多,速度越快。

图5 摇杆
2.3.2实现方式
4轮总成分为转向控制阀,动力缸、转向横拉杆等组成,如图6所示。转向控制阀、动力缸组成为一整体。转向齿条与转向动力缸运动轴是一体。转动方向盘通过方向柱,转向摇臂带动转向控制阀,从而将液压油导入活塞一边,活塞另一边连通回油油道,推动转向拉杆移动,改变轮方向,实现转向[10]。

图6 转向控制示意
转向控制阀采用液压常流式。不转向时,转向控制阀保持开启,高压油直接从转向阀流回储油壶,转向动力缸的活塞两边工作腔,由于都与低压油管相通而不起作用。进入转向机的油压进入控制阀又流回储油壶内,称为常流式。转向油泵实际处于空载,增加了使用寿命。转向时,转向控制阀将高压油送入一侧的动力缸工作腔,另一侧工作腔连通回油,液压推动活塞实现转向的助力。当转动方向盘到达到左或右极限时,此时助力油泵输出油压的最大值。此时助力泵处于最大的载荷。优点是机构简单,转向油泵寿命长、泄漏少,消耗功率也较少。
3 样机与试验
研制的作业平台样机见图7。

图7 平台外观
为了检验平台的性能,在烟台某船队进行了为期1年的空载试验、负荷试验、行走适应性试验和维修作业等试验。试验结果表明,该平台可以快速高效地进行维修作业,实现了预期设想。
4 结论
针对船舷侧为曲面,船体维修时需经常改变平台与船舷的相对位置,利用普通轮全回转驱动技术实现了平台原地直行、转弯及横移,满足了船舶维修作业的特殊需要。该平台适用于2 000 t以下船舶修造行业坞排上的修造作业。在今后的工作中,应进一步提高平台的最大升降高度和稳定性,为更大吨位船舶的坞排修造作业提供制式装备。
[1] 綦化乐,陈亚东.船舶坞排升降机:N103482541A[P].2014-01-01.
[2] 葛永飞.舞台升降机构的分析与设计[J].陕西科技大学学报,2004(22):108-111.
[3] 林海,李建萍.5t叉车门架链条连接板的结构改进[J].工程机械与维修,2015(1):93-94.
[4] 石一兵.叉车三级门架的设计与计算[J].起重运输机械,1977(4):62-63
[5] 周雄.三峡升船机塔柱高空作业升降平台研究与应用[J].中国工程科学,2013(9):83-86.
[6] 刘涛,罗念宁.高空作业车辆升降机构液压系统改进设计[J].液压与气动,2005(9).12-13.
[7] 曹鹏举.一种雷达用车载液压升降机构的设计[J].起重运输机械,2009(10).24-27.
[8] 谷青松.飞机维修升降平台车液压系统的设计[J].液压与气动,2005(9):18-19.
[9] 段晨东.高空作业平台CAN总线控制系统设计[J].计算机测量与控制,2011(2):318-321.
[10] 马全军,全方位行走AGV轮系的研究[J].机电工程,2002,19(1):45-47.
Design of Platform for Ship Dock Row Maintenance Working
LI Xue, QI Hua-le, CHEN Ya-dong, GU Yin, SUN Zheng
(Zhenjiang Watercraft College of PLA, Zhenjiang Jiangsu 212003, China)
Because of the ship-repairing industry lacking of the standard high-elevation equipment, a kind of platform is designed for maintenance working on the ship dock and ship slipway occasion. By using the full rotary driving walking device and the triple-stage masts lifting mechanism, the platform can roll at every direction at its ground and move, the working face also can moving up or down. The platform has advantages of convenience, efficient and security. It can satisfy the requirements for ship dock row maintenance working.
platform for ship dock row maintenance working; triple-stage masts mechanism; common wheel
2016-03-09
2016-04-18
中国人民解放军总装备部通用装备保障部下达2010年度通用装备保障科研项目(通装[2010]115)
李雪(1978—),男,硕士,讲师
U672
A
1671-7953(2016)04-0033-04
DOI:10.3963/j.issn.1671-7953.2016.04.008
研究方向:船艇可靠性
E-mail:lixue_cumt@sohu.com
