基于粒子群优化的模糊自适应PID控制器的应用
2016-08-18刘庆运蒋雅芬
刘 涛,刘庆运,蒋雅芬
(1.安徽工业大学 机械工程学院,安徽 马鞍山 243032;2.安徽工业大学 工程实践与创新教育中心,安徽 马鞍山 243032)
基于粒子群优化的模糊自适应PID控制器的应用
刘涛1,刘庆运1,蒋雅芬2
(1.安徽工业大学 机械工程学院,安徽 马鞍山 243032;2.安徽工业大学 工程实践与创新教育中心,安徽 马鞍山 243032)
针对拆除机器人机械臂液压系统存在控制对象模型难以建立、时变性和非线性等特性,采用粒子群算法优化模糊控制器,从而整定PID参数。研究结果表明,相比传统的PID控制器,基于PSO优化的自适应模糊PID控制器具有无超调、稳态精度高等特点。
拆除机器人;液压系统;粒子群算法;自适应模糊PID控制器
拆除机器人机械臂的工作装置为复杂的机电液压系统[1-4],该系统中的参数随时间变化,是典型的时变系统,且存在大负载干扰,很难建立其精确的数学模型。由于传统的PID控制参数固定,不能兼顾系统的动静态性能,鲁棒性较差[5-9],尤其对非线性、时变参数、大时滞系统的控制效果不佳,所以传统的控制很难达到精确控制的目的。
本文研究的机械臂液压系统具有非线性且受一些外界条件的制约,如参数的时变性、外负载干扰和交叉干扰等[10-14],因此设计了基于PSO基础之上的模糊自适应PID控制器,以确保系统的稳定性和鲁棒性。
1 模糊自适应PID控制器的设计
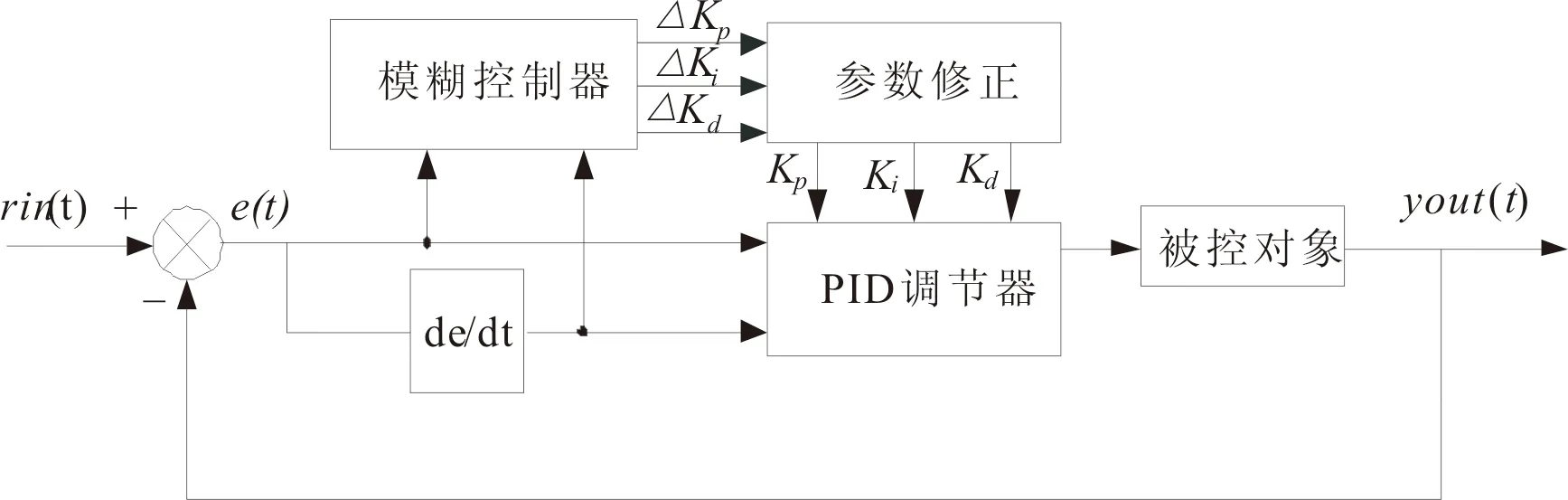
图1 模糊自适应PID控制图
模糊自适应PID控制框图如图1所示:
控制系统的输入量为:误差e和误差变化率ec;输出量为:参数调整量∆Kp、∆Ki、∆Kd。每一时刻对e和ec的值进行采样,并进行模糊推理[15-17],实时对PID的三个参数Kp、Ki、Kd进行修正,修正公式为:
Kp=Kp0+∆Kp
(1)
Ki=Ki0+∆Ki
(2)
Kd=Kd0+∆Kd
(3)
式中Kp0、Ki0、Kd0为PID控制器设定的初始值。
1.1输入输出变量的模糊化及模糊控制规则的搭建
输入变量e、ec及输出变量∆Kp、∆Ki、∆Kd的模糊子集均定义为:{NB(负大),NM(负中),NS(负小),ZO(零),PS(正小),PM(正中),PB(正大)}。将和的模糊论域设置为[-3,3]。∆Kp、∆Ki、∆Kd模糊论域分别设置为[-0.3,0.3]、[-0.6,0.6]、[-3,3]。
根据经验以及∆Kp、∆Ki、∆Kd对系统输出响应的影响[18]得出模糊控制规则见表1。
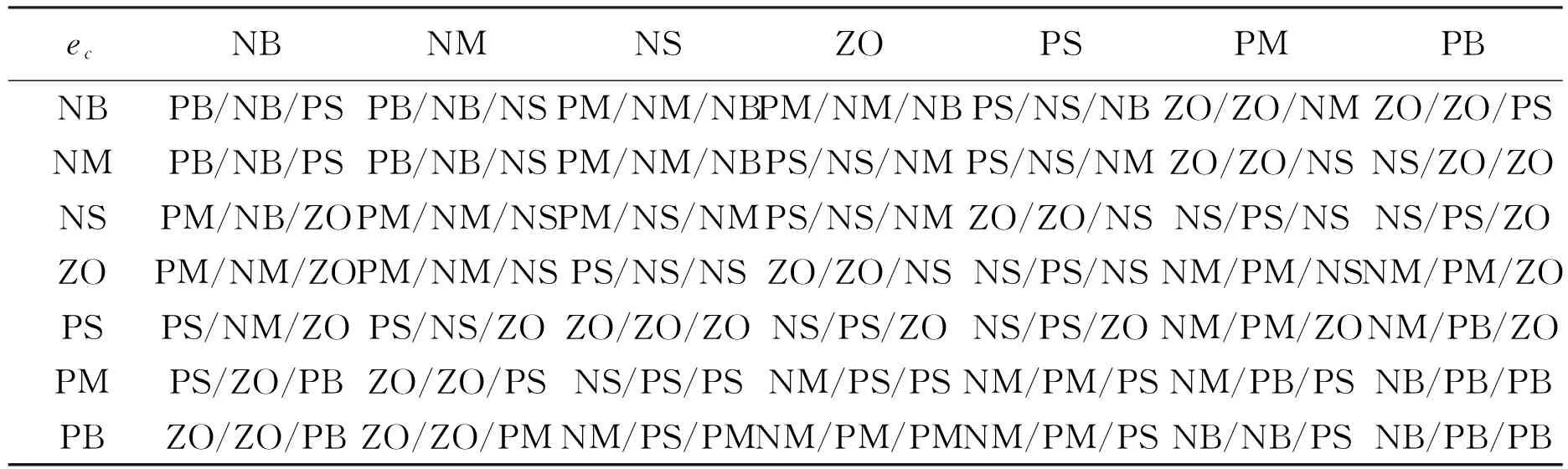
表1 Δkp、Δki、Δkd模糊规则表
1.2模糊推理和解模糊
模糊推理形式为:
R:IfxisAandyisBthenZisC
解模糊采用加权平均法[19],假设U为离散论域,即U={u1,u2…un},A(uj)为uj的隶属度函数,则其计算公式为:
(4)
2 基于PSO的模糊自适应PID控制器优化
粒子群算法具有简单易行、设置参数少和收敛速度快等特点[20]。标准的PSO更新公式为:
Vij(k+1)=Vij(k)+c1×rand()×(pbestij(k)-xij(k))+c2×rand()×(gbestij(k)-xij(k))
(5)
xij(k+1)=xij(k)+Vij(k)
(6)
式中,i=0,1,…,n为粒子个数;j=1,2,…,D为粒子的维数;k为粒子的进化代数;rand()是分布于[0,1]区间的随机数;c1、c2为学习因子。通常将粒子的位置和速度限制在区间[-xmin,xmax]、[-Vmin,Vmax]之间。
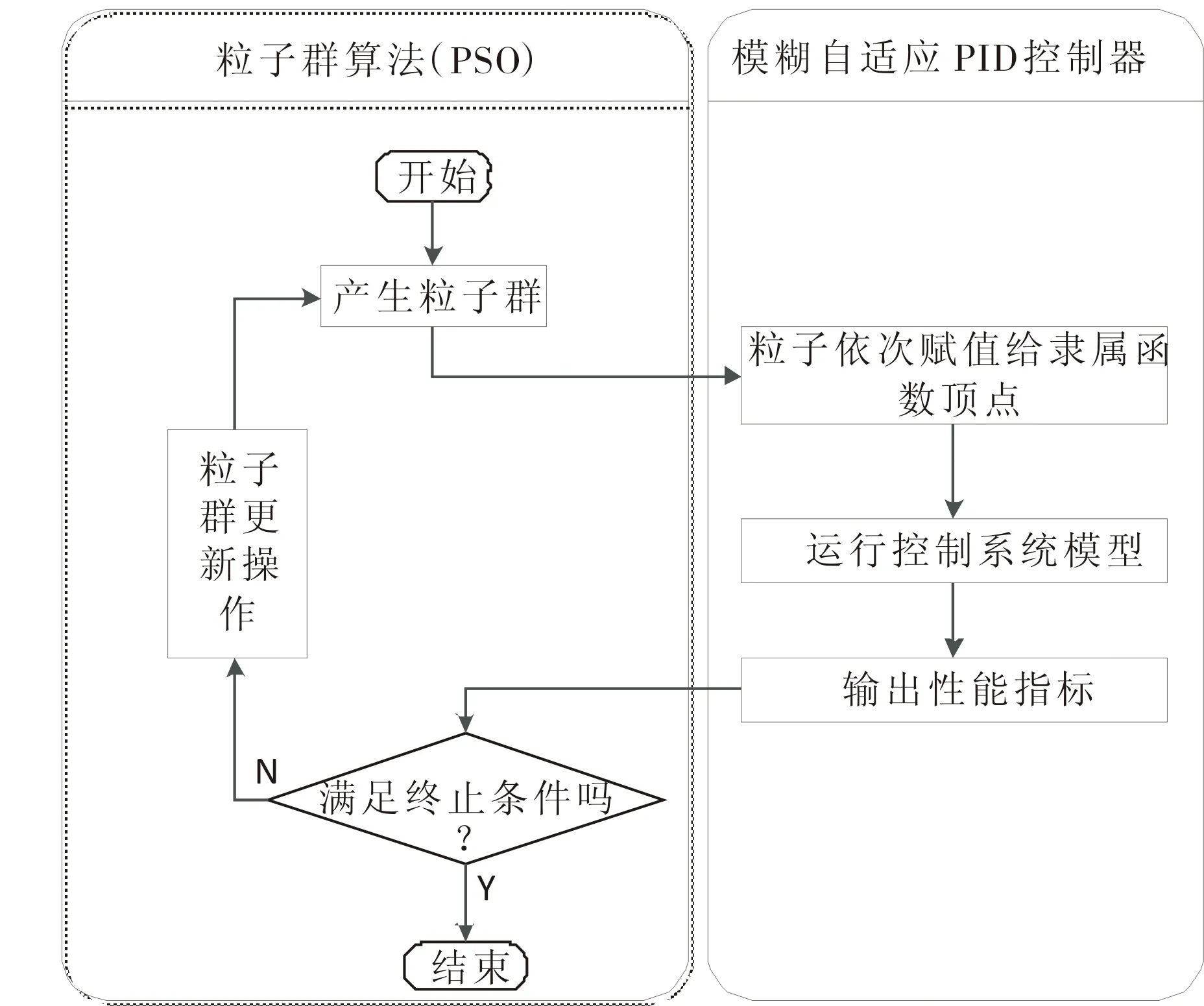
图2 控制器优化流程图
2.1适应度函数选择
适应度函数采用绝对误差积分准则(IAE),为了防止控制量过大,在优化过程中加入了输入量的平方项,其函数表达式为:

(7)
式中,e(t)为系统误差,ω1、ω2、ω3为权值,tu为上升时间。
采用IAE作为系统的性能指标时[21],适应度函数表达式中各项积分数值越小,控制性能越好。
2.2参数设置
根据模糊控制器的特性,取n=15。假设:隶属函数顶点集合为P1,那么,粒子编码为p1=[p1,p2,…,p15]。令学习因子c1=c2=2,粒子规模为20,最大迭代次数为20,速度在[-1,1]之间,位置在[0.0001,3]之间。
3 仿真结果实验分析
在仿真实验中,KP、Ki、Kd的自适应调整过程及PSO优化后的阶跃响应如图3~图6所示。
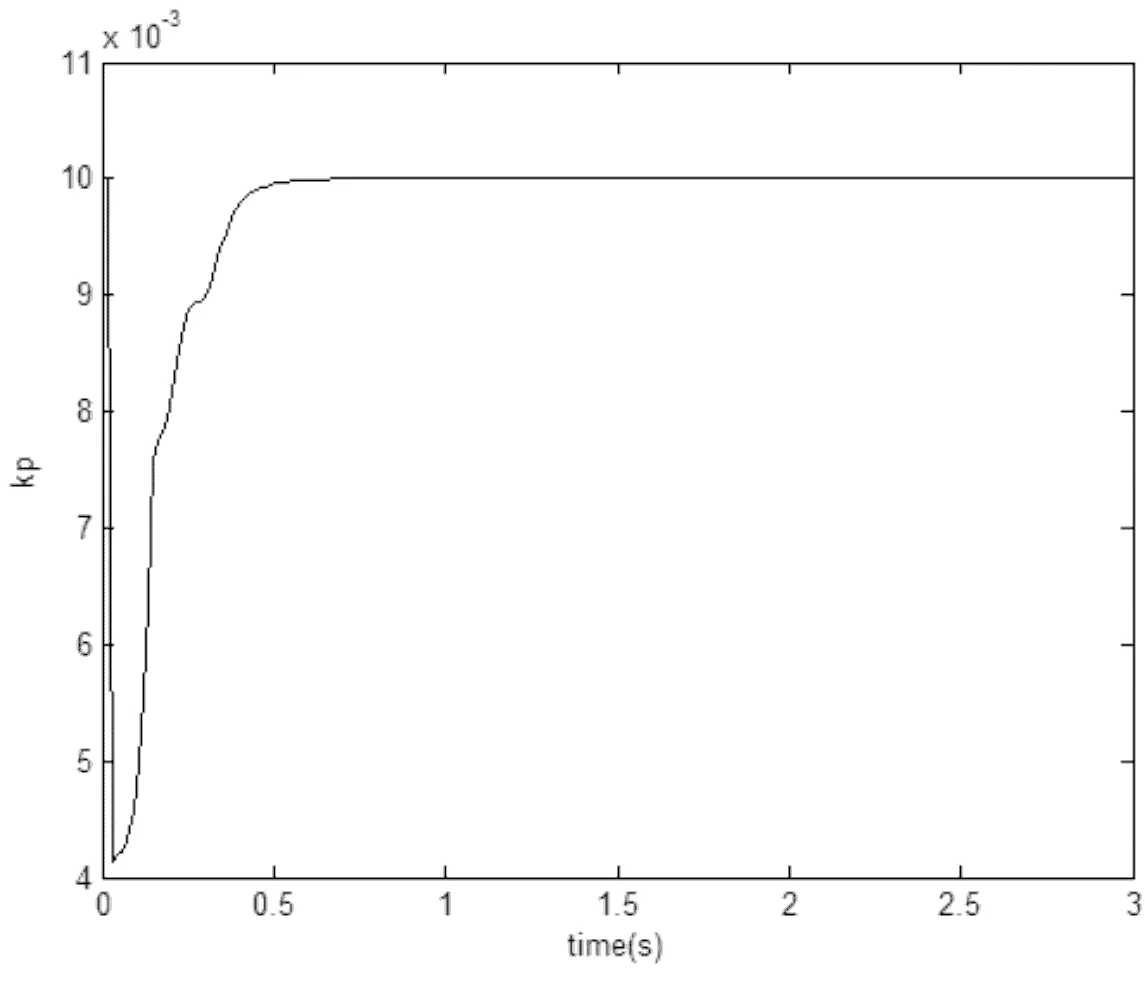
图3 Kp的自适应调整
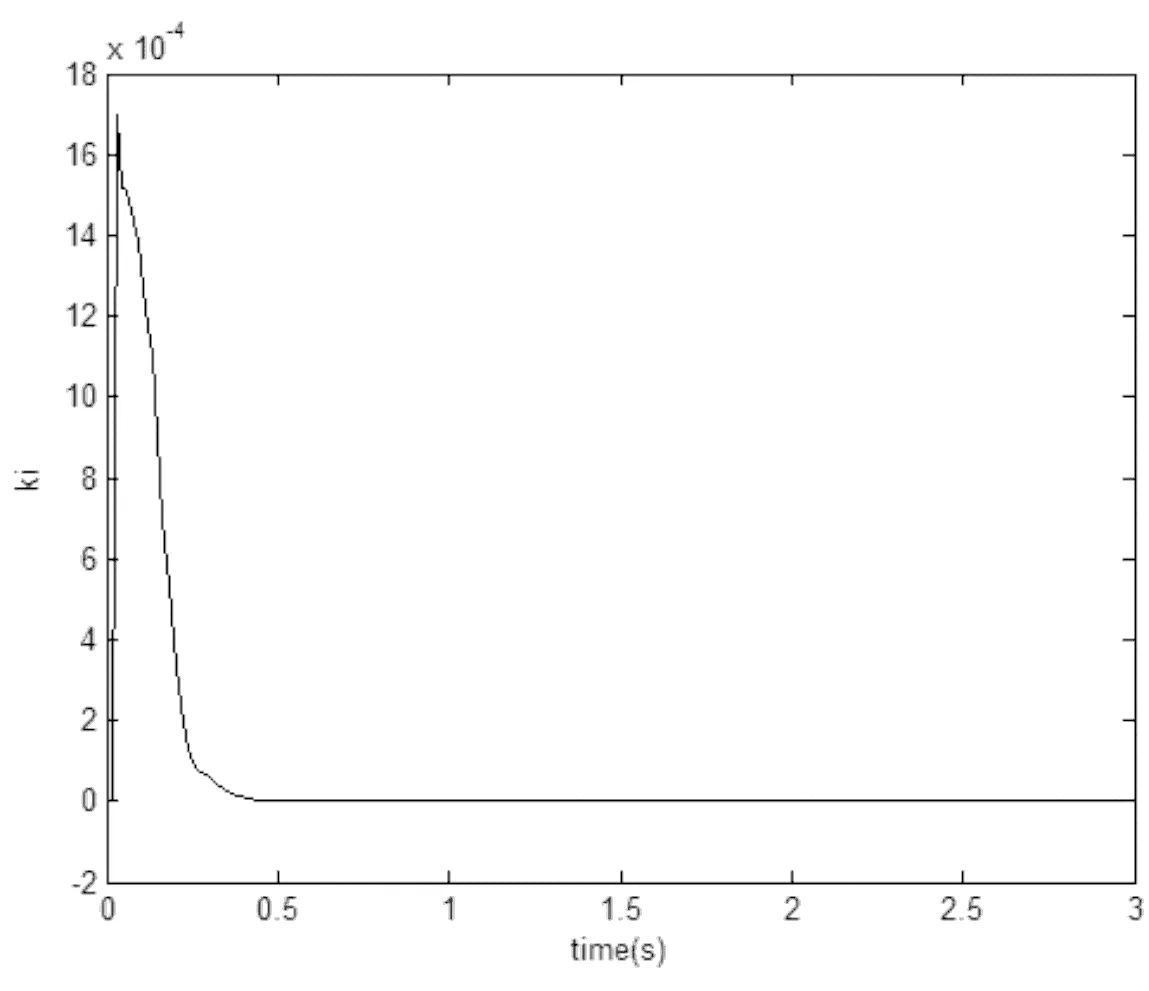
图4 Ki的自适应调整
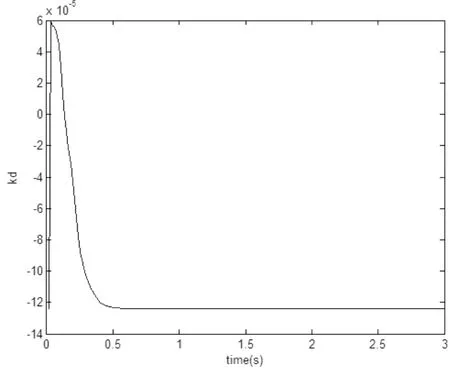
图5 Kd的自适应调整
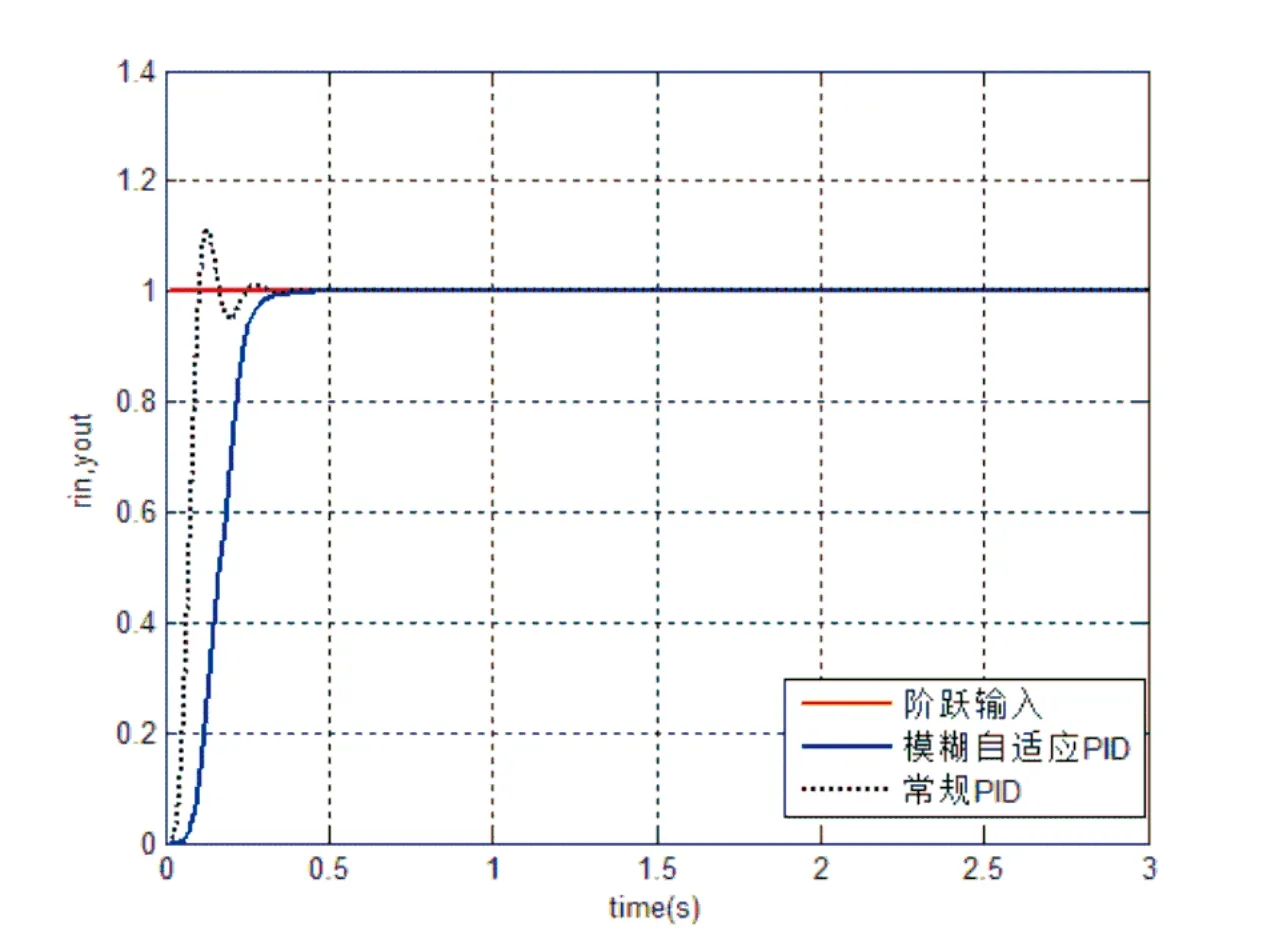
图6 PSO优化后的阶跃响应
由图3~图6可以看出,PSO优化后的模糊自适应PID控制器系统超调量近乎0,响应速度有所提高,误差变化率明显减小。
4 结论
利用粒子群优化算法,对模糊控制器进行了优化,并通过仿真验证了该控制器的可行性,可以实现拆除机器人机械臂液压系统精确控制的目的。
[1]Nguyen Hong Quang.Robust low level control of robotic excavation[D].Sydney:The university of Sydney,2000.
[2]Finzel R,Helduser S,Jang Dal-Sik.Electro-hydraulic control systems for mobile machinery with low energy consumption[A].Proceedings of the seventh international conference on fluid power transmission and control[C].2009:214-219.
[3]Zhang Jun,Jiao Shen-gjie,Liao Xiao-ming.Design of Intelligent Hydraulic Excavator Control System Based on PID Method[J].Computer and computing technologies in agriculture III,2010,207-15.
[4]谭湘敏,赵冬斌,易建强等.全方位移动机械手运动控制-建模与控制[J].机械工程学报,2009,45(1):35-41.
[5]倪敬,项占琴,潘晓弘,等.管捆成形电液系统自学习粗糙-模糊PID控制研究[J].机械工程学报,2006,42(10):224-228.
[6]Gu J,Ma XD,Li JF.Linear and nonlinear control of a robotic excavator[J].Journal of Central South University,2012,19(7):1823-1831.
[7]许益民.电液比例控制系统分析与设计[M].北京:机械工业出版社,2005.
[8]杨军宏,尹自强,李圣怡.阀控非对称缸的非线性建模及其反馈线性化[J].机械工程学报,2006,42(5):204~207.
[9]张德丰.MATLAB模糊系统设计[M].北京:国防工业出版社,2009.
[10]周黎英,赵国树.模糊PID控制算法在恒温升温系统中的应用[J].仪器仪表学报,2008,29(2):405-409.
[11]Dinh Quang Truong,Ahn,Kyoung Kwan.Parallel control for electro hydraulic load simulator using online self tuning fuzzy PID technique[J].Asian Journal of Control,2011,13(4):522-541.
[12]房怀英,杨建红,吴仕平.基于模糊PID控制沥青砂浆车液压调平系统[J].长安大学学报(自然科学版),2011,31(1): 98-101.
[13]谭湘敏,赵冬斌,易建强,等.全方位移动机械手运动控制-建模与控制[J].机械工程学报,2009,45(1):35-41.
[14]Niku,S.B.著;孙富春译.机器人学导论-分析、系统及应用[M].北京:电子工业出版社,2004.
[15]蔡自兴.机器人学[M].北京:清华大学出版社,2000.
[16]哈尔滨工业大学理论力学教研室.理论力学[M].北京:高等教育出版社,2002.
[17]杨智,朱海峰,黄以华.PID控制器设计与参数整定方法综述[J].化工自动化与仪表,2005,32(5):1-7.
[18]白金,韩俊伟.基于MATLAB/Simu1ink环境下的PID参数整定[J].哈尔滨商业大学学报(自然科学版),2007,23(6):673-677.
[19]刘金琨.智能控制[M].北京: 电子工业出版社,2009.
[20]Dinh Quang Truong,Ahn,Kyoung Kwan.Parallel control for electro hydraulic load simulator using online self tuning fuzzy PID technique[J].Asian Journal of Control,2011,13(4):522-541.
[21]Chiou,Juing-Shian,Tsai,Shun-Hung,Liu,Ming-Tang.A PSO-based adaptive fuzzy PID-controllers[J].Simulation modelling practice and theory,2012,26: 49-59.
Fuzzy self-adaptive PID controller application based on PSO
(LIU Tao1,LIU Qing-yun1,JIANG Ya-fen2)
(1.SchoolofMechanicalEngineering,AnhuiUniversityofTechnology,Maanshan243032,China;2.EngineeringpracticeandInnovationEducationCenter,AnhuiUniversityofTechnology,Maanshan243032,China)
Aiming at the characteristics of the control object model of the hydraulic system of the dismantling robot manipulator is difficult to establish,time variant and nonlinear and so on,the sect1icle swarm optimization algorithm is used to optimize the fuzzy controller,so as to set the PID parameters.The research results show that compared with the traditional PID controller,the adaptive fuzzy PID controller based on PSO optimization has the characteristics of no overshoot, high steady-state accuracy and high accuracy.
demolition robot;hydraulic system;PSO;fuzzy self-adaptive PID
2016-01-23
刘 涛(1987—),男,陕西渭南人,硕士,助教。
1674-7046(2016)03-0080-04
10.14140/j.cnki.hncjxb.2016.03.015
TH17
A
