船舶信息系统数据流设计方案研究
2016-08-17邢博闻哈尔滨工程大学自动化学院黑龙江哈尔滨5000中国船舶重工集团公司第七四研究所上海0003
刘 胜,邢博闻,陈 潇(. 哈尔滨工程大学 自动化学院, 黑龙江 哈尔滨 5000;. 中国船舶重工集团公司第七〇四研究所,上海 0003)
船舶信息系统数据流设计方案研究
刘 胜1,邢博闻1,陈 潇2
(1. 哈尔滨工程大学 自动化学院, 黑龙江 哈尔滨 150001;2. 中国船舶重工集团公司第七〇四研究所,上海 200031)
为缓解因船舶平台内所涉传感器/执行器数量增加所产生的船舶信息系统数据通信压力,在充分考虑系统能达性/能观性基础上,提出船舶信息系统数据流长度的普适判据,并结合执行器实时物理特性对执行器数据流通信内容进行设定;与此同时,通过提出一种基于传感器当次变值及上次估计误差为索引的双指标评价方法对传感器数据流通信内容优化设计。从而完成了对船舶信息系数据流整体设计方案的研究,在缩短数据流长度的前提下,保证了系统对数据信息采集、处理及应用的客观需求,进而优化系统资源、提升系统性能,并通过举例方式对其工作流程进行较为完整的分析。
船舶信息系统;数据流;能观性分析;传感器数据调度
0 引 言
随着船舶技术的发展,船载设备的种类及功能得到进一步完善,这在极大程度上丰富了船舶的适用范围,提升了船舶作为一个高集成度的一体化载体的智能化程度。然而不可否认,随着船载设备所涉传感器/执行器数量的增多,船舶各系统内及系统间所需传递的数据信息数量不断增加,这在极大程度上加重了各系统的通信负担,也增大了其通信线路的铺设难度。与此同时,船舶一体化平台对各系统信息进行综合分析、处理及决策的客观需求,也促使船舶框架研究人员对船舶各系统的通信线路进行整合,进而衍生出其在船舶信息系统(Ship Information System,SIS)领域的研究。不失普遍性,船舶信息系统架构可概括为命令控制接口(Command Control Interface,CCI)及其与全船层面上各传感器/执行器间进行数据传输的通信网络[1]。目前比较常见并已应用到实船上的船舶信息系统包括RICE[2],Ship System 2000[3],GEDMS[4]及TSCE[5]等。在文献[6]中,本文作者曾对行业内船舶信息系统领域近十几年的发展及研究成果进行概述并对其内涵进行了定义与说明。对于一个大规模的船舶信息系统,隶属于不同传感器节点的多个传感器需要进行高精度的再次融合。然而目前的研究仍是以船载独立系统为对象进行研究,其均在一定程度上忽略了船舶信息系统自身的客观属性,对通信网络所能承受的信息负载能力考虑不足。
在最近几年中,美国海军研究实验室已开发出一款名为“Volume Sensor”[9]的多感官实时检测系统,该系统可作为各种实时传感和情景应用模板。在此基础上,文献[10]中Christian等将该系统应用于船舶火灾探测系统上,并将基于信息的通信协议引入到一个模块化、可扩展的船舶传感器网络系统中。文献[11 - 12]中本文作者结合已有系统完成了对船舶信息系统的常见框架及体系结构的建立,但并没有对其数据流通信过程开展深入研究。
由于船舶信息系统所挂传感器/执行器均隶属于不同系统,各系统对信息实时性的要求程度不同,如何在节约系统资源情况下,最大限度的将必要信息采集、发布成为了船舶信息系统研发过程中急需考虑的问题。当前一般将其归结为任务决策层面,其中比较有代表性的决策方法包括TSCE的ISP (Integrated Ship Plan)。该方法实现了全船层面下的船舶任务及指令优先级设定,并依此对船舶各个系统进行实时规范。该方法有效提升了船舶信息系统的监控效率和可靠性。然而,考虑到船舶信息系统的特异性和复杂性,在规范数据流长度的情况下,各节点在一个通信周期内仅能发布/获取部分必需信息,因而增加了数据流内容分配的必要性。为此,文献[13]通过对船舶信息系统能达性进行分析,并在充分考虑执行器物理特性的情况下,提出了一种行之有效的船舶信息系统执行器通道设定方案,但是其理想化了执行器及通信网络之间的通信过程,因而有一定的局限性。
为解决上述问题,本文对船舶信息系统数据流设定问题开展研究,在能达性/能观性基础上,提出了船舶信息系统数据流长度判据,并分别提出了对执行器节点及传感器节点的数据流内容的设定方案。在缩短数据流长度的前提下,保证了系统对数据信息采集、处理及应用的客观需求,进而优化了系统资源、提升了系统性能。
1 船舶信息系统框架
不失一般性,本文采用如图 1 所示的船舶信息系统典型框架。各电子系统内的被控对象表示为Q=[Q1,…QJ]。为忽略无关因素,本文假设船舶信息系统所涉所有底层自身对象均具备能控性/能观性。Qj的状态方程如下:

1)执行器节点、传感器节点及显示器节点彼此完全独立。
2)对于单一被控对象,其所需的所有传感器信息均由一个传感器节点提供,其所涉执行器也均连接在一个执行器节点上,节点协同问题将作为今后的一个研究方向开展。与 Qj相关的传感器节点表示为 SNj,其数据流用 SDj表示;执行器节点表示为 ANj其数据流用 ADj表示。
3)各数据流具备统一的通信标准,即不同节点的数据流长度相同。
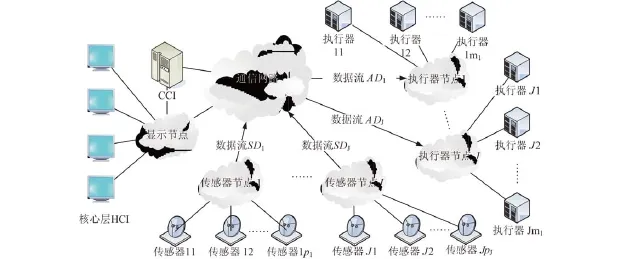
图 1 船舶信息系统典型框架Fig. 1 Typical structure of SIS
4)传感器节点 SNj一次仅能将个传感器信息录入数据流中,且有即 CCI 在一次通信中仅能从 SNj处获取有限的数据信息。执行器节点一次仅能获取个执行器控制指令,且有
1.1 选取队列
对于 i=1,2…,pj,采用二值函数表示其传感器 Sij在 k 时刻被添加近数据流 SDj的状态,即其中“1”表示信息被添加如数据流,“0”表示未被添加。本文中,作者采用一种选取队列被控对象所涉 pj个传感器信息被添加如 SDj情况。毫无疑问,SDj的数据长度完全取决于的数值大小。
就传感器 Sji而言,其输出 yji(k) 能被船舶信息系统应用的先决条件是其信息被添加入数据流 SDj并被信息系统采纳,即否则船舶信息系统将视该传感器信息不可用,此时其数据信息将由估计值代替,其确定方法将在后续章节进行阐述与分析。船舶信息系统在 k 时刻所真实采用的 Sji信息表示为且有:


其中


采用表述执行器 Aji能否获取有效的控制指令,且有假设船舶信息系统运算出的控制指令表示为,则有:

结合式(2)和式(3),式(1)可拓展为如下表达形式:

1.2 问题描述

为此本文所解决的问题可概括为:
2)提出合适的调度算法以从 pj传感器中挑选个传感器并将其数据添加入传感器数据流;
3)提出合适的选取方法以从 mj执行器中挑选个执行器控制指令,并将其添加入执行器数据流。
2 数据流长度设计
首先开展对对象(4)能观性的分析,并将其拓展到能达性分析过程。为考虑传感器选取问题对系统能观性的影响,首先假设可证明,当且仅当rank(R) = nj时,被控对象(4)在 [0,kf] 可观,其中:
定理1 假设 Aj(k) 可逆,将 kf表示为 kf=α × nj+ β,其中,β = 1,…,nj–1。如果满足如下条件之一,则被控对象(4)在 [0,kf] 能观测。

① 取 Lj= Lj0;
② 用 Lj 1内的行替代 Lj内的并保证 rank = Lj(nj),由于 rank = Lj(nj),该种替代方法可时刻成立
③ 对于 i=2,…,用 Lji内的行替代 Lj内的并时刻保持 rank =(Lj)nj
上述替代方法的结果是 Lj均包含来自内的且保证 rank = Lj(nj)。 该方法即可在每个中选取行的情况下选取 nj个线性无关项。基于上述方法,可重构 R 的右端为。进而可从选取个线性无关项。在此之后,若处获取另外个线性无关项,为此总共可选取的线性无关项数量为由此可见当时,被控对象(4)在 [0,kf] 上可观。另一方面若处尽可获取 β 个线性无关项,为此所能选取的线性无关项总数为由此可见当时,被控对象(4)在[0,kf] 上可观。
为降低船舶信息系统冗余程度并节约数据流资源,本文选取满足条件 A 或 B 的最小为添加入每个数据流 SDj中的传感器数量。
推论1 假定 Aj可逆且(1)能观,存在可确定的整数用以构建一个选取队列来保证被控对象(4)对于给定的整数 loj,loj步能观测。
3 数据流内容设计
3.1 执行器数据流内容设计
基于上述推论,对于给定 lcj步能达对象(4),可推算出其执行器数据流长度所需添加的控制指令数量,进而确定数据流长度。接下来本文通过考虑执行器物理特性提出了船舶信息系统执行器数据流内容的取舍标准。为此须以执行器实时工作情况为指标将船舶信息系统执行器定义 KⅠ类(“倔强”)执行器及 KⅡ类(“依从”)执行器。
定义 4. 对于执行器 Aji,若其在 k 时刻仍处于执行前次控制指令阶段,而忽视当前控制指令 uji(k),则称 Aji在 k 时刻为 KⅠ类(“倔强”)执行器,反之则为 KⅡ类(“依从”)执行器。对任意正常工作 Aji而言,若其处于待机(无可执行控制指令)阶段,则其必为 KⅡ类。
结合图 1,可知当且仅当如下条件之一成立时,执行器 Aji在 k 时刻为 KⅠ类。
① Aji伺服系统存在缓存器,且被设定为在完成前条指令前,忽视所有当前指令;
积极推进全域旅游开发是降低分时度假经济成本走出“无钱度假”之困境的必经之路。通过推进全域旅游,开发新的旅游资源,打开供给端,均衡供需关系,避免出现因供需不平衡出现的价格虚高现象,可降低度假的经济成本,提升度假体验感从而多角度的有效刺激当地消费。积极推进全域旅游,要求各地方政府加强合作,通过消费宣传引导联动地区间全域旅游。可以通过各省份之间的联动合作,以“城城联动”为形式,通过开行旅游专列,带动地区间旅游业的发展以此推动各省推行全域旅游,既能为降低分时度假的经济成本也能通过官方宣传为分时度假正名。
② CCI 将控制指令 uji(k) 添加入 ADj,但被 ANj屏蔽,未发送到 Aji;
③ CCI 未将控制指令 uji(k) 添加入 ADj。
条件 ① 情况下为 Aji主动 KⅠ类,② 和 ③ 情况下为被动 KⅠ类。为节约系统资源,本文所提出的船舶信息系统数据流设定方案,将条件 ③ 作为 KⅠ类的实施方法。可知,在执行器数据流内容设定过程中,应尽量筛除针对 KⅠ类的控制指令。根据 SIS 对Aji当前指令运行情况的掌控程度,KⅠ类的设定判据如下:
1)基本规则

若 Aji当前指令运行情况不可知,则须设定物理属性变量及其定义如下:其中表示执行器 Aji从 uji(k-1)运行到 uji(k) 所需的物理时间,为 SIS 循环周期。z0为 Aji的运行初始值。与分别表示个运行周期内,Aji所能运行到的最大、最小值。为此,KⅠ的基本设定规则为:

其中 rji表示执行器从 uji(k-1) 运行到 uji(k) 状态所需的步数,且需要说明的是,当时,系统可视
2)附加规则
在上述规则基础上,若 Aji当前指令运行情况可知,其表示为则有如下附加规则:
基于上述规则,船舶信息系统执行器数据流内容的添加原则为优先添加 KⅡ类执行器的控制指令,若其数量小于则添加面向 KⅠ的控制指令,但其指令内容维持为上次输入值,相似的方法可参照文献[13]。
3.2 传感器数据流内容设计
提出了一种基于双指标评价方法的传感器数据信息的选取方案。
1)传感器变值指标
对于 i = 1,…,pj,采用二值函数表示传感器 Sji的变量指标。当且仅当时,其中表示?y传感器 Sji上一?>次ε获取权限添加入数据流 SDj中的传感器信息。为阈值,表示当传感器所示数值变量超过阈值时,其变量指标为 1,否则为 0。当时,本文将 Sji标记为类传感器。且有传感器变量指标由各传感器节点确定。与此同时,本文定义
2)传感器偏差指标
对于 i = 1,…,pj,采用二值函数表示传感器 Sji的偏差指标,其取值由传感器 Sji的与的差值确定。当且仅当时,有其中是 C C I ?对>φ于的估计值。为阈值,其表示当上次 CCI实际采用的 Sji数值与其估计量的差值若大于则其在 k 步的偏差指标否则为 0。由于篇幅有限,本文将不对传感器信息最优估计方法进行赘述,可参照作者之前的研究成果[15]。传感器偏差指标由CCI 确定,并且通过信息读取指令 SCj(k) 发送到SNj。
3)传感器信息调度方法
基于上述双评价指标,提出一种传感器信息调度方法。为此,定义优先级函数其数值大小决定了 CCI 对传感器 Sji的需求程度。当 CCI 获取到来自 Sji信息时,重置为 0。信息读取指令 SNj为如定义 1 结构的选择队列,且有。本文选出优先级函数数值较大的个传感器,并设定否则为 0。若 Sji所对应的则称该传感器为类传感器。
当传感器节点 SNj从 CCI 获取 SCj(k),可由及另一队列确定。其中,且满足,否则即,?λ当 CCI 在 k-1 步发布了针对传感器 Sji的采集指令,但该信息未被节点添加入 SDj中时,为此,本文将此类传感器标记为类传感器。定义如下 4 类传感器工作情况,即
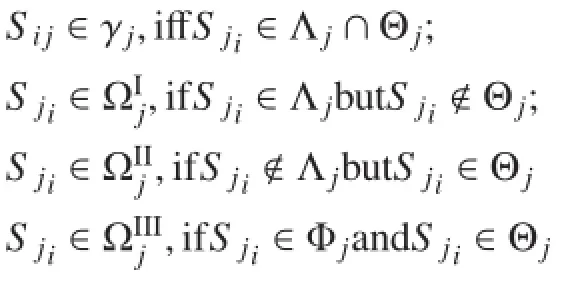
本文所提出的传感器数据流信息调度方法如下:
4 例 证
以 1 艘中型船舶的运动控制任务为例,对上文提出的船舶信息系统数据流设计方案进行阐述。该系统执行器包括双舵(包含舵鳍)、双桨及一对减摇鳍(包含翼鳍),系统状态空间方程形式为其状态量包括其中 V、及分别表示船舶航速、航向及横摇。由于篇幅有限,船舶运动模型及控制策略的研究可参照作者之前的研究成果[1 1 – 1 2],其执行器包括其中分别表示左主/翼舵、右主/翼舵、主/翼鳍及左右桨,仅在上式中分别表示舵角、鳍角及螺旋桨转速。
假设系统 Q1需满足 15 步能达,且起始时刻为k0,为此执行器数据流设定方法为:根据推论 1,可设kf= 7;由于 kf= αn1+ β,n1= 6,则可知 α = 1,β = 1;基于章节 2 所述定理及推论可知,即表示:若当每个执行器流中至少包括 5 个执行器的控制指令,则系统可满足 15 步能达,在此过程中每个 KⅡ执行器具备相同获取控制指令的权限,且均高于 KⅠ执行器权限。
基于同样的被控系统,假定其包含 8 个须被采集传感器,即其中分别表示左舵舵角、右舵舵角、鳍角及左右桨转速。在此假设系统需要 25 步能观。首先基于推论 1,对于 l1o= 25,可设 kf= 13;由于 kf= αn1+ β 且 n1= 6 进而求出 α = 2、β = 1;最后根据定理 1,可知即表示:若当每个传感器数据流中至少包括 5 个传感器的相应数据,则系统可满足 25 步能观。进一步设定及数值如下:
5 结 语
在充分考虑系统能达性/能观性基础上,提出船舶信息系统数据流长度的普适判据,并分别提出面向执行器及传感器数据流内容的选取方法。从而完成了对船舶信息系数据流整体设计方案的研究,在缩短数据流长度的前提下,保证了系统对数据信息采集、处理及应用的客观需求,进而优化了系统资源、提升了系统性能,并为船舶信息系统的后续研究提供了理论基础。
[1]GEER D W. Total ship real time control: an operational necessity whose time has come[J]. Naval Engineers Journal, 1998,110(1): 225–234.
[2]LISTER J R, ROSIE J D. A digital maritime integrated internal communication system[J]. Journal of Naval engineering,1995, 35(3): 504–519.
[3]KLLBERG B, STRHLE R. Ship system 2000, a stable architecture under continuous evolution[C]//Proceedings of the 6th Ada-Europe International Conference on Reliable Software Technologies. Berlin Heidelberg: Springer, 2001: 371–379.
[4]MEIER S J, MANFREDI A. Gigabit ethernet data multiplex system (GEDMS)-enabling the net-centric evolution of navy combatants[C]//Proceedings of the 2006 IEEE Conference on Military Communications. Washington DC, USA: IEEE, 2006: 1–7.
[5]HENRY M, IACOVELLI M, THATCHER J. DDG-1000 engineering control system (ECS)[C]//Proceedings of the ASNE Intelligent Ship VIII Symposium. Philadelphia, USA: ASNE,2009.
[6]LIU S, XING B W, LI B, et al. Ship information system: overview and research trends[J]. International Journal of Naval Architecture and Ocean Engineering, 2014, 6(3): 670–684.
[7]LI Z X, YAN X P, GUO Z W, et al. A new intelligent fusion method of multi-dimensional sensors and its application to tribo-system fault diagnosis of marine diesel engines[J]. Tribology Letters, 2012, 47(1): 1–15.
[8]LIU S, WANG M J, ZHANG L Y. Research on information fusion of infrared and radar sensor based on SVM[C]//Proceedings of the 2012 International Conference on Measurement, Information and Control (MIC). Harbin, China: IEEE, 2012: 98–101.
[9]MINOR C P, JOHNSON K J, ROSE-PEHRSSON S L, et al. Data fusion with a multisensor system for damage control and situational awareness[C]//Proceedings of the 2007 IEEE Conference on Advanced Video and Signal Based Surveillance. London, UK: IEEE, 2007: 313–317.
[10]MINOR C, STEINHURST D, ROSE-PEHRSSON S, et al. Multisensor system for fire detection and situational awareness[R]. SPIE Newsroom, 2007.
[11]LIU S, XING B W, LI B. Development actuality and key technology of networked control system[C]//Proceedings of the 32nd Chinese Control Conference. Xi'an, China: IEEE, 2013: 6692–6697.
[12]LIU S, XING B W, ZHI P F, et al. Design of semi-physical simulation platform for ship cooperative control system[C]//Proceedings of the 11th world congress on Intelligent Control and Automation (WCICA). Shenyang, China: IEEE, 2014: 5962–5966.
[13]XING B W, LIU S, ZHU W L. Actuator channel setting strategy for ship information systems based on reachability analysis and physical characteristic[C]//Proceedings of the 2015 IEEE 15th International Conference on Environment and electrical Engineering. Rome, Italy: IEEE, 2015: 932–937.
[14]ZHANG L, HRISTU-VARSAKELIS D. Communication and control co-design for networked control systems[J]. Automatica, 2006, 42(6): 953–958.
[15]LIU S, YANG D, Su X, et al. The vertical motion state estimation of hydrofoil catamaran based on improved UKF[C]//Proceedings of the 32nd Chinese Conference on Control Conference. Xi´an, China: IEEE, 2013: 4618–4622.
Design of data flow for ship information system
LIU Sheng1, XING Bo-wen1, CHEN Xiao2
(1. College of Automation, Harbin Engineering University, Harbin 15001, China;2. The 704 Research Institute of CSIC, Shanghai 200031, China
In this article, the length and content setting problem of data flow in ship information system (SIS) structure are considered. Reachability and observability analysis methods are proposed to shorten the length of data flow without affecting the expected performance of SIS. According to the determined data flow length, we present task execution time of actuator is considered in its data flow setting strategy for farther optimized design, after that a scheduling algorithm to set the content of sensor data flow. This scheduling algorithm is based on a double index evaluation method which include the variation of sensor data during assigned steps and the deviation between estimated value and real value of observation. Besides these, algorithm examples are provided as well.
ship information system;data flow;observability analysis;scheduling algorithm
TP14
A
1672 – 7619(2016)04 – 0110 – 06
10.3404/j.issn.1672 – 7619.2016.04.022
2015 – 08 – 24;
2015 – 12 – 14
刘胜(1957 – ),男,教授,从事自动控制理论及应用、随机系统最优估计与控制、船舶航行与姿态控制、鲁棒智能控制系统领域研究工作。
