利用无人机快速更新大比例尺地形图方法研究
2016-08-16陈楚王琳天津市测绘院天津300381
陈楚,王琳(天津市测绘院,天津 300381)
利用无人机快速更新大比例尺地形图方法研究
陈楚∗,王琳
(天津市测绘院,天津 300381)
研究拟采用利用无人机差分GPS技术,差分GPS辅助空中三角测量、铺设构架航线等相关技术,最大限度减少外业控制点的基础上,提高高程精度,以满足大比例尺地形图对高程的要求。最后通过对控制点和检查点的精度分析,得出了利用无人机快速更新大比例尺地形图方法的可行性结论。
差分GPS技术;构架航线;大比例尺地形图;无人机
1 引 言
2 试验区概况
本文使用的是UV20固定翼无人机遥感系统,该无人机系统具有高可靠性和便捷的操纵性等优异品质,同时经过优化的气动布局,配备全自动弹射起飞和伞降系统,可加装高精度稳定云台、双频GPS接收机及全画幅数码相机等任务载荷,设备在无人机中的布置如图1所示。该系统具备了完全自主化起降的特点,提供给用户更便捷、更可靠的操控、更灵活的运用以及对操纵人员更简化的培训要求,该无人机在同级别起飞重量的无人机中具有相对较长的航时。相机采用Cannon EOS 5D MarkⅢ相机,主要参数如下:
①像元大小:6.25 um
②影像尺寸:5 760×3 840
③焦距:34.392 0 mm
④快门速度:1/60-1/8000
无人机搭载的是华测GPS M600双频GPS接收机,实时动态RTK精度如下:
①平面精度:±(10+1×10-6×D)mm
②高程精度:±(20+1×10-6×D)mm
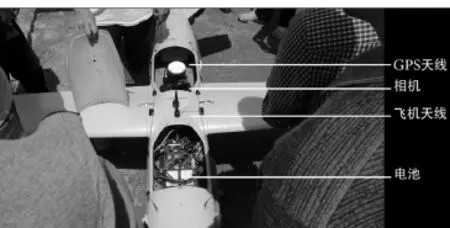
图1 无人机内设备布置图
为验证控制点数量和差分GPS对空三精度的影响,选择天津静海团泊为试验区如图2白框所示区域,地形类别为平地,地面坡度均在2°以下,面积约 6.5 km2。
3 影像数据获取
利用UV20固定翼无人机搭载Cannon EOS 5D MarkⅢ相机和双频GPS接收机,为了更好对比不同航摄方案对结果精度的影响,此次飞行航线按照制作
∗ 收稿日期:2015—11—12
作者简介:陈楚(1980—),男,高级工程师,主要研究方向遥感技术与应用、变化监测,城市三维地形图制作。
基金项目:国土资源部公益性行业科研专项(201311045)
近几年,随着计算机技术、通讯技术的发展,无人机数字航摄技术以其机动灵活、经济、便捷等显著特点,成为传统航空摄影测量手段的有力补充,在突发灾害应急数据获取及小范围快速成图方面显示出了无人机航摄系统独特的优势。但由于无人机采用的是非量测轻型相机,基高比小、像幅过小、相机畸变差大等问题,目前无人机航测技术大都是生产制作DOM,对于大比例尺地形图的生产尚处于研究试验阶段,其局限性主要是因为其高程精度无法满足大比例尺地形图的要求(平面精度能够满足大比例尺地形图的精度要求),导致这一技术无法真正应用于实际工程中。
为了使无人机航摄影像数据准确地反映地形地貌的真实情况,并提高无人机及航摄影像数据使用的广泛性,本文研究利用无人机搭载双频GPS接收机,设计最佳的航摄方案和像控点布点方案,在最大限度减少控制点的基础上,提高高程精度,满足大比例尺地形图对高程的要求,减少外业工作量,以达到在一定区域范围内快速更新大比例尺地形图的目的。

图2 试验区域范围
1∶500地形图的要求进行设计,并增加了两条构架航线。所获得的试验区域影像如图3中黄点所示,共包括19条航线,其中两条为构架航线,878幅影像。

图3 POS和控制资料分布图
有关具体飞行参数如下:
①17条南北方向航线相对航高:280 m
②2条东西方向构架航线相对航高:315 m③航向重叠度:70%
④旁向重叠度:50%
⑤地面采样间隔:5 cm
4 控制资料
为了便于分析不同像控点布点方案对结果精度的影响,试验中按照每间隔 500 m采集一个控制点,所有控制点的平面和高程值均采用全野外RTK采集。在地物特征不明显的区域,用白色油漆喷射控制标志,如图4所示。试验区域内共采集了90个平高控制点,控制点分布如图3红色三角形所示。

图4 控制点标志
5 精度统计分析
空中三角测量采用以下两种方式:在构架航线辅助下,只根据地面控制点进行平差;在构架航线辅助下,通过差分GPS,布设少量地面控制点进行平差。
在图3中的90个控制点中,按照均匀布设原则,分别选取4、7、8、9……作为平高控制点,剩余点位作为平高检查点,进行空三加密并做精度统计,结果如表1所示。从表1和图5可以看出,控制点的数量在达到9个之后,检查点的高程精度没有明显提高,趋于稳定。在采用9个控制点的布设方法(即四周各3个,中间1个)时,检查点的平面中误差为 0.158 7 m,高程中误 差为0.124 1 m,满足 《1∶5001∶1 000 1∶2 000地形图航空摄影测量内业规范》(GB/T 7930 -2008)对于平地1∶500地形图的地物点对最近野外控制点的精度要求,即:平面位置中误差≤30 cm;高程中误差≤20 cm。
对于误差较大的点,经检查分析,多位于区域网边缘。因此建议实际飞行时,其飞行区域应适当外扩,以保证测区的内部精度,如表1所示。
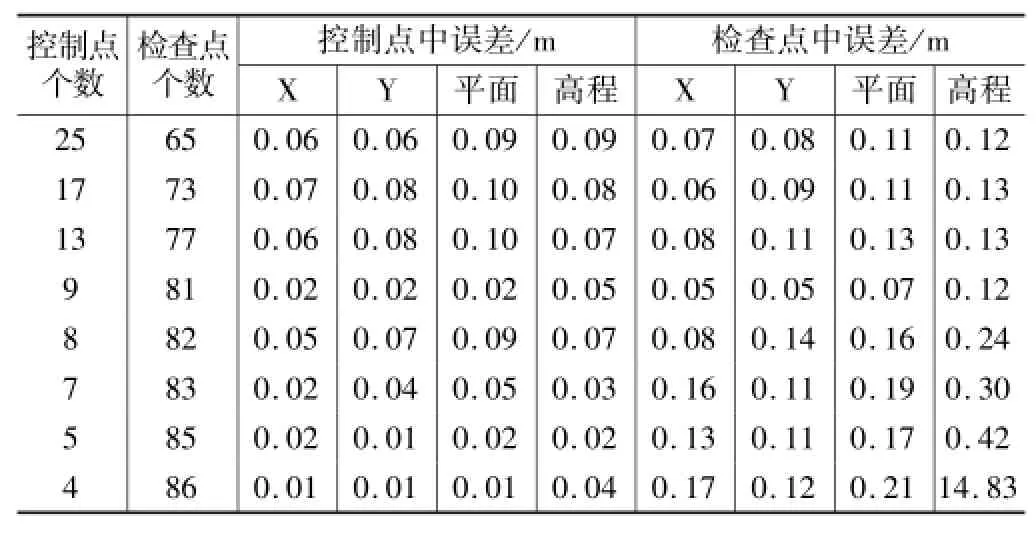
控制资料精度统计分析 表1
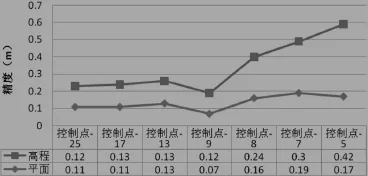
图5 不同控制点布设方案的对比
6 结 论
利用固定翼无人机进行低空航空摄影,通过搭载双频GPS接收机和铺设构建航线等方法,通过试验分析,利用无人机航摄,在少量控制点的情况下,(一般 10 km2的范围内只需9个平高控制点),该方法完全能满足大比例尺地形图更新的精度要求。利用制作的正射影像图与前期地形图的对比,快速发现地形图更新区域,并利用空三成果在立体环境下对变化区域进行地形图采集,与全野外测图相比,能达到快速更新地形图的目的。
[1]李天子,郭辉.非量测数码相机的影像纠正[J].测绘通报,2006:59~61.
[2]詹总谦.基于纯平液晶显示器的相机标定方法与应用研究[D].武汉:武汉大学,2006.
[3]Jim H.Chandler,Tom Buffin-Belanger et al.The Accuracy of a River Bed Moulding/Casting System and the Effectiveness of a Low-cost Digital Camera for Recording River Bed Fabric[J]. Photogrammetry Record,2003,9,18(103):209~223.
[4]廖永生,陈文森.无人机低空数字摄影测量参数计算和路线设计系统[J].测绘通报,2011(9).
[5]陈宏敏,杨朝辉.无人机低空数字摄影测量系统的设计与实现[J].测绘与空间地理信息,2013(4).
[6]郑永明,王艳梅,张志霞等.无人机航测数据质量检查及成果应用[J].测绘通报,2012(S1).
[7]王琳,陈楚,吴正鹏等.相对定向中错误匹配的剔除方法研究[J].城市勘测,2012(8):73~76.
[8]王湘文,于启升,王雅鹏.无人机低空摄影测量系统在大比例尺地形图中的应用[J].地矿测绘,2013,29(1):34~36.
[9]张俊前.无人机遥感影像快速拼接方法研究[J].城市勘测,2013(10):73~75.
Research on the Method of Rapid Updating Large Scale Topographic Map With the UAV
Chen Chu,Wang Lin
(Tianjin Institute of Surveying and Mapping,Tianjin 300381,China)
This study intends to use the UAV differential GPS technology,differential GPS aided aerial triangulation,laying frame line and other related technologies,the maximum reduction of external control points on the basis of improving the height accuracy,in order to meet the requirements of large scale topographic map.At last,by analyzing the accuracy of the control points and the inspection points,the feasibility of using the UAV to quickly update the large scale topographic map method is obtained.
differential GPS technology;frame route;large scale topographic map;UAV
1672-8262(2016)02-105-03中图分类号:P231,P283.5
B
