基于FREAK匹配算法的目标工件测距
2016-08-16改造者黄晓城李德隆
改造者:黄晓城 刘 伟 李德隆
基于FREAK匹配算法的目标工件测距
改造者:黄晓城 刘 伟 李德隆
为了精确地测量出目标物的三维空间距离,解决双目立体视觉区域匹配算法视差图效果不稳定、匹配困难等问题,提出一种自行选取目标物,利用FREAK匹配算法和RANSAC迭代算法相结合的方式直接对目标物进行立体匹配的方法,不仅在背景复杂的环境下能有效对目标工件进行立体匹配,同时较于SIFT、SUFT具有更高的匹配速率,实验证明,本文方法在精确测量目标工件的情况下,很好的减少了立体匹配时间。
随着我国科学技术和市场经济的快速发展,如何降低成本、保证质量的生产情况下,提升整个生产企业的生产效率关乎每个生产企业的竞争力,因此采用工业机器人对整个压铸生产线进行智能化生产加工,成为企业的发展方向。在工业生产中,传统的机器人一般通过设置固定位姿对目标工件进行抓取,但这种设置机器人固定位姿的操作方式,经常会因为工件位置发生偏差造成对工件的抓取失败,利用双目立体视觉不仅可以对工件进行高精度的二维或三维空间定位,同时受外界环境干扰小,可靠性高。
双目测距拘束的关键在于特征点的匹配,传统的双目立体视觉测距就是利用视差图的方式,得到目标物体的三维空间信息,而视差图的计算距离(BM算法)存在较大的误差,根本原因在于模块匹配中,搜索区域的匹配点存在较大的误差;在基于SIFT、SURF立体匹配算法中,由于匹配速率低,导致目标工件测距时间长等原因,本文提出一种基于FREAK立体匹配算法的研究。
FREAK匹配算法
FREAK(Fast Retina Keypoint,)算法即快速视网膜关键点匹配算法,是由Alahi等提出的一种局部不变特征匹配算法,该算法基于视网膜采用模型,基本的低精度图像基本信息由特征点周边的采样区域处理,细节等高精度的图像信息由特征点中心区域处理,类似于BRISK,是一种固定的抽样策略。
Freak描述符是在一个类似人眼视网膜拓扑结构进行采样,如图1所示。其中Fovea区域主要是对高精度的图像信息进行处理,Para主要是对低精度的图像信息进行处理。该结构中,以大圆中心的点为特征点,其他分布的点为特征点的采样点,采样点距离特征点越近,密集度越大,同时采样点的圆半径越小,其中以每个采样点为中心的圆半径代表的是高斯平滑核的大小。通过二进制比特串来表示FREAK描述符,由采样点对和其对应的高斯核进行阈值对比以生成二值串。将结果级联便形成最终描述符F。具体生成方法为:
(1)FREAK描述符
假设F为二进制描述子,是一对视网膜网格感受野,是期望的二进制编码长度, 表示采样点对 中前一个采样点的像素值,则:

FREAK的旋转不变性是基于描述符的圆形对称采样结构,而圆半径和采样位置随着尺度的变化而变化,使FREAK具有尺度不变性,在对每个采样点进行高斯平滑生成的圆半径使FREAK具有一定的削弱噪声的能力。
(2)扫视搜索
人类视觉系统通常是由人眼周围区域感知外界的基本信息,然后由中央凹对目标物进行捕捉。FREAK使用类似扫视方法,首先,构建匹配比较器的第一级,由FREAK描述子的前N1个字节对图像进行搜索,如果距离在某个阈值T1范围内,则构建下一个匹配比较器第二级,以此类推。超过90%的候选匹配描述子可以通过前16个字节被剔除。
(3)方向的定位
为了计算关键点的旋转角度,对选取的采样点对进行局部梯度的计算。假设G为用于计算局部梯度的采样点对的集合,M是G中采样点对的个数,是一个由感受域中心点的空间坐标组成的二维向量,其描述子的主方向由梯度之和的平均值求得:

实验效果如图2所示。

图1 FREAK描述符采样结构图
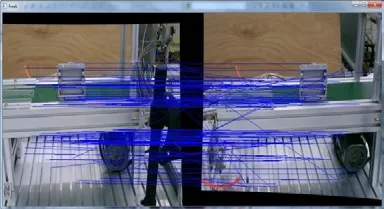
图2 FREAK特征提取和匹配
图3 FREAK特征提取和匹配
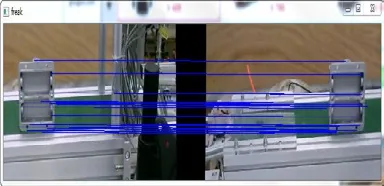
图4 FREAK特征提取和匹配
由图2可以看出,基于FREAK算法对物体的匹配产生了大量的误匹配点,同时在对目标工件的测距中,产生了大量的其他区域的匹配,不仅造成匹配效率更低,同时给目标物的匹配带来许多误匹配信息。基于双目立体视觉系统,提出一种FREAK立体匹配算法与RANSAC迭代算法相结合的匹配算法,同时利用自行选取目标工件的ROI区域,实现对目标物的正确提取和匹配。
通过RANSAC迭代算法对FREAK匹配算法的匹配点对进行筛选,去除错误匹配点对,同时本文采用一种自行选取ROI区域的方式,直接对目标工件区域进行选取,再通过FREAK匹配算法对目标进行匹配,有效的提高了目标工件的匹配效率和正确率。具体实验效果以图3、图4所示。
本文同时采用SIFT、SURF立体匹配算法分别对该场景的目标物进行区域选取和立体匹配,比较三种立体匹配算法的匹配速度、成功匹配度以及稳定性。

表1 FREAK匹配算法实验结果

表2 SIFT、SURF、FREAK匹配算法比较
测距结果
利用上述匹配算法得到目标物的匹配像素坐标,根据双目立体视觉原理,根据式(3)计算出目标物的深度信息,如表1所示(目标工件的实际测量距离为1100mm)。


表3 目标工件的三维距离测距实验结果
由上述结果可以看出,在利用FREAK匹配算法对目标工件进行立体匹配中,测得的目标工件的深度平均距离为1097.925m误差为2.075mm,符合测量误差。
结语
通过以上分析,基于FREAK的特征点提取和匹配实验中,FREAK通过利用人眼视网膜拓扑结构进行特征点的扫视搜索,提取出了较多的特征点,在基于原图的FREAK特征提取和匹配中,FREAK与SIFT和SURF算法一样,由于其他物体的干扰导致了一些错误匹配点对,采用自行选取的ROI区域可以看出,FREAK去除了一些外界物体带来的误匹配点对。利用RANSAC算法结合FREAK算法再对ROI区域内的匹配点对进行筛选,去除了所有的误匹配点对,使目标物的提取和匹配达到了较好的效果,同时在速度上比SIFT算法、SURF算法更快,但是FREAK算法对仿射发生变化情况下,匹配成功率会有所降低,稳定性一般。

黄晓城 刘 伟 李德隆
广东工业大学材料与能源学院
黄晓城,(1989-)男,硕士研究生,研究领域为图像处理、机器视觉等,刘伟,男,副教授,研究领域为图像处理,机器视觉等,李德隆,(1988-)男,硕士研究生,研究领域为图像处理、机器视觉等。
10.3969/j.issn.1001-8972.2016.09.034
