基于直线模型的路径图像检测算法研究*
2016-08-11吴晓波周晓龙张先超
潘 涛 吴晓波 周晓龙 张先超
(1.后勤工程学院后勤信息与军事物流工程系 重庆 401311)(2.中国石油集团测井有限公司 鄯善 838202)
基于直线模型的路径图像检测算法研究*
潘涛1吴晓波1周晓龙2张先超1
(1.后勤工程学院后勤信息与军事物流工程系重庆401311)(2.中国石油集团测井有限公司鄯善838202)
摘要导航路径识别是基于图像处理自动导引车的关键技术之一,提出一种基于直线模型的路径图像检测算法。该算法采用一种改进的Otsu进行路径图像的二值化,使用快速中值滤波去除点状噪声,并用Sobel检测算子提取路径边缘信息。为了更准确地提取导航路径中心线参数,提出中心线拟合算法,最终利用概率Hough变换实现导航路径检测与参数提取。实验结果表明,该算法能够准确地检测出导航路径参数,并具备很好的实时性。
关键词路径识别; Otsu阈值; Sobel算子; Hough变换
Class NumberTP391
1 引言
近年来,由于硬件水平和机器视觉技术的迅猛发展,基于图像处理的自动导引车(Automated Guided Vehicle,AGV)逐渐成为研究热点[1~4]。在AGV的自动导航过程中,直线特征的检测与分析对AGV有着重要的意义[5]。要实现自动导引车的准确、实时导航,路径图像处理结果的好坏直接影响到AGV的路径跟踪效果。
为了更好、更高效地提取路径特征,国内外学者已经提出了很多基于图像识别的路径检测方法。这些检测方法按照处理目的来划分,主要集中在两个问题上:路径图像的去噪和感兴趣目标的提取。李进等[2]为得到良好的实时性,首先采用均值滤波滤除较多的点状噪声,然后结合形态学的腐蚀运算在保护导航路径不受影响的同时得到较为满意的滤波效果。金辉等[6]则采用经典的中值滤波完成图像的滤波操作,在直线特征的检测上,采用动态约束Hough变换中极径与夹角取值范围来提高算法的实时性。文献[7]提出一种基于机器视觉的车道线提取方法,并且对比分析了几种主流算法对车道线提取的实时性和准确性。文献[8]基于Hough变换,提出一种兼具鲁棒性和快速性的车道线提取方法,该方法在先验知识的基础上限制车道路径搜索的范围,从而达到减少Hough变换运算量的目的。
为提高自动导引车导航的实时性和鲁棒性,本文以直线模型的导引路径为研究对象,在图像预处理阶段采用一种快速的中值滤波方法完成滤波操作,并采用改进的最大类间方差法进行图像的阈值分割。为提取满意的路径边缘,采用经典的Sobel边缘检测算子。针对经典Hough变换计算量大,耗费内存空间的问题,采用一种改进的概率Hough变换完成直线的拟合与参数的提取。
2 路径图像的预处理
由于由AGV采集的初始路径图像包含很多随机噪声,并且图像中占大部分的背景信息对路径跟踪毫无作用,为了获得更好的路径识别效果,必须首先对路径图像进行预处理。
2.1滤波
经过阈值分割后的路径图像,可能包含细小点状噪声。为了滤除噪声对后续边缘提取的影响,本文采用如式(1)的中值滤波器对图像进行中值滤波,窗口大小选为3×3。
f(x,y)=median{wf(x,y)}
(1)
其中
为了得到wf(x,y)的中值,传统中值滤波将窗口中的像素全部顺序排列,进而得到中值。每次运算的计算量为32(32-1)/2=36。本文采用一种类似中值的快速排序方法,减少运算量,争取图像处理的尽可能大的实时性。基本思想是先对wf(x,y)的每一列进行排序,则每列的中值必然在第二行。最后对第二行进行排序,则中值就处于wf(x,y)窗口中的中心位置,不难发现,此方法的运算量为4×3×(3-1)/2=12次。值得指出的是,由此方法得出的并不是滤波窗口中严格意义上的中值,而是中值的近似值。实验证明,由此得出的中值并不影响滤波效果,可以得到和传统中值滤波一样的滤波效果。
2.2二值化
路径图像的二值化是为了提取出有用的前景信息,滤除或部分滤除背景信息[9]。由于AGV是处于动态运行过程中,固定阈值分割不适用于此。AGV在运行过程中,路径图像容易受到光照、阴影、噪声等因素的影响,经典的最大类间方差法(Otsu)可能会造成误分割。本文采用一种改进的最大类间方差法完成图像的二值化。基本思想如下:
(2)
(3)
这两个类的灰度均值分别为
(4)
(5)
整幅图像的灰度均值为
(6)
所以可以得到这两个类的类间方差为
σ(t)=w1(t)(μ1(t)-u)2+w2(t)(μ2(t)-u)2
(7)
经典的Otsu法通过遍历图像所有灰度级,找出使类间方差σ(t)达到最大值的t值,从而达到分割目的。文献[10~12]已经指出,经典的Otsu法在背景与前景相差不明显,也就是直方图双峰谷底不深可能会造成误分割。而AGV的运行环境会受到光照、阴影等影响,会出现上述直方图谷底不深的情况。
为了克服上述问题,基于Fan Jiu-lun[10]的论述并兼备均值滤波的思想,本文用领域灰度值概率均值加权类间方差,在克服因为直方图双峰谷底不深而造成的误分割的同时,兼具均值滤波的效果,得到修正的类间方差判别式:
η(t)=(1-h(t))*(w1(t)(μ1(t)-u)2
+w2(t)(μ2(t)-u)2)
(8)
2.3边缘增强
边缘增强的目的是突出导航路径边缘信息,为下一步的路径识别奠定基础。常用的边缘检测算子有:Robert算子、Sobel算子、Prewitt算子等。本文采用Sobel边缘检测算子。Sobel算子反映的是图像的一阶梯度,经过二值化和去噪后,一阶梯度的极值点就是路径的边缘。本文采用水平和垂直方向的卷积核,如图1。
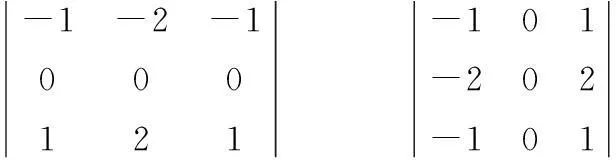
(a)水平核(b)垂直核
图1Sobel算子的卷积核
3 直线的拟合与导航参数的提取
3.1导航线中心线提取
经过预处理后的路径图像包含导引车道线的左右边缘信息,不便于AGV寻线参数的提取。一般情况下,AGV应沿着导引车道线中心线运动,因此,为了更准确地导引AGV,将导航线的检测问题转换为求车道线边缘线的中心线。具体方法步骤如下:
1) 逐行扫描图像中的每一行,记录下每个非零像素点的列坐标。
2) 将每行的非零像素点的列坐标求平均值。
3) 将每行求取的列坐标平均值所属列置255,其他位置置为0。
经过以上的操作,则所有的中心点组成的集合即为中心线可能的位置,另一方面,也减少了Hough变换中的检测点数,对算法的实时性有一定帮助。
3.2导航线的参数提取
经过3.1节的操作,得到一系列离散的中心点,求取导航线参数的过程,也可以认为是一个直线拟合的过程。Hough变换因为其良好的抗噪性能,被广泛地应用于智能车的车道线检测中[13~15]。但传统的Hough变换计算量大,所占内存空间大。不利于AGV的实时导航。鉴于此,考虑到AGV对算法的实时性的要求,本文在传统Hough变换的理论基础上采用一种改进的概率Hough变换[16]来加速算法的执行效率,在保证实时性的同时取得良好的检测效果。
在传统的Hough变换中,图像空间中的每个待检测点依次映射到(ρ,θ)的参数空间,而一条直线的确定理论上只需要两个点即可。对图像空间中的每个点进行映射,固然会得到可靠的拟合直线,但势必会造成计算的浪费。本文基于文献[17],提出一种改进的概率Hough变换,该算法通过一定的判别准则减少图像空间的映射点数,在保证得到正确的检测效果的同时,加速算法的执行效率。具体的实现步骤如下:

2) 检测图像空间边缘点集是否为空,若是,则算法结束。否则,从图像空间中随机取出一个像素,对该像素进行Hough参数空间的映射。将得到的相应vote(ρ,θ)累加1。
3) 删除从图像空间中取出的边缘点。并判断vote(ρ,θ)是否大于阈值thr,否则回到2)。
4) 由上步得到的(ρ,θ)确定一条直线,删除图像空间中位于所确定的直线上的点,并将此vote(ρ,θ)清零。回到2)。
4 实验分析
为了验证文中算法的实际性能,采集了导航线图像,图像大小为512×384像素,本文的全部实验是在Core i3 CPU 2.27GHz,4GB内存的计算机上进行的。在Matlab 7.12平台上采用图2(a)所示的导航路径作为原图。其中图2(b)、(c)分别是经典Otsu法和改进的Otsu法得到的分割图像。


图2 分割效果的对比
从图2(b)、(c)、(d)可以看出,经典的Otsu在分割过程中存在一定程度上的误分割,即把一部分背景当作前景。本文提出的改进Otsu较好地分割了背景和前景,获得了良好的分割效果。
采用Sobel边缘检测算子和中心线提取算法的过程如图3所示,其中图3(a)中的两条白线是检测出的路径边缘,图3(b)中的点是包含中心线的点集。

图3 边缘提取
采用本文提出的改进概率Hough变换检测导航线,投票阈值设定为80,检测结果如图4所示,图中的直线表示检测出的导航直线。航向角取逆时针为正,坐标原点为图像的左上角。则由本文概率Hough变换所检测出的极角为27°,极径为232像素。

图4 直线检测
本文算法在执行效率上有明显的提高,实验结果如表1所示。
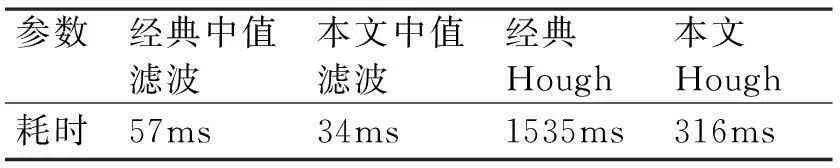
表1 各算法的速度比较
由表1可以看出,本文采用的概率Hough变换来检测车道直线,效率是经典Hough变换的5倍,能较好地满足自动导引车的实时性需求。
5 结语
仿真实验表明,针对Otsu分割算法的固有缺陷,本文提出了利用领域信息的改进Otsu算法,新算法能较好克服Otsu算法的误分割,使得分割效果更加稳定可靠。本文在充分考虑检测算法的有效性的同时,把算法的实时性作为重要衡量指标,在滤波阶段通过一种改进的中值滤波加速算法的执行速度。针对Hough变换耗时的问题,采用了一种改进的概率Hough变换,进一步加速算法的执行速度。
参 考 文 献
[1] Wang, Yifei, Dahnoun, et al. A novel system for robust lane detection and tracking[J]. Signal Processing,2012,92(2):319-334.
[2] 李进,陈无畏.基于自适应导航参数的智能车辆视觉导航[J].农业机械学报,2012,43(6):19-24.
LI Jin, CHEN Wuwei. Navigation of vision-guided intelligent vehicle based on adaptive navigation parameters[J]. Transactions of the Chinese Society for Agricultural Machinery,2012,43(6):19-24.
[3] 陈无畏,孙海涛,李碧春,等.基于标识线导航的自动车跟踪控制[J].机械工程学报,2006,42(8):164-170.
CHEN Wuwei, SUN Haitao, LI Bichun, et al. Tracking control of automatic guided vehicle based on lane marker navigetion[J]. Chinese Journal of Mechanical Engineering,2006,42(8):164-170.
[4] 赵颖,孙群,等.基于机器视觉的非结构化道路导航路径检测方法[J].农业机械学报,2007,38(6):202-204.
ZHAO Ying, SUN Qun, et al. Navigation path detection method of unstructured road based on machine vision[J]. Transactions of the Chinese Society for Agricultural Machinery,2007,38(6):202-204.
[5] 康文静,丁雪梅,等.基于改进Hough变换的直线图形快速提取算法[J].光电工程,2007,34(3):105-108.
KANG Wenjing, DING Xuemei, et al. Fast straight-line extraction algorithm based on improved Hough transform[J]. Opto-Electronic Engineering,2007,34(3):105-108.
[6] 金辉,吴乐林,等.结构化道路车道线识别的一种改进算法[J].北京理工大学学报,2007,27(6):501-505.
JIN Hui, WU Lelin, et al. An improved algorithm for the lane recognition of structured road[J]. Transactions of Beijing Institute of Technology,2007,27(6):501-505.
[7] Kim Z W. Robust lane detection and tracking in challenging scenarios[J]. IEEE Transactions on Intelligent Transportation System,2008,9(1):16-26.
[8] Jung Gap Kuk, Jae Hyun An, et al. Fast lane detection & tracking based on Houng transform with reduced memory requirement[J]. IEEE Transactions on Intelligent Transportation System,2010:1344-1349.
[9] Ruey-Ming Chao, Hsien-Chu Wu, et al. Image segmentation by automatic histogram thresholding[C]//Conference on Interaction Sciences: Information Technology, Culture and Human,2009:136-141.
[10] Fan Jiu-lun, Bo Lei. A modified valley-emphasis method for automatic thresholding[J]. Pattern Recognition Letters,2012,33(6):703-708.
[11] Mengxing Huang, Wenjiao Yu, Donghai Zhu. An improved image segmentation algorithm based on the Otsu method[C]//International Conference on Software Engineering, Artificial Intelligence, Networking, and Parallel/Distributed Computing,2012:135-139.
[12] He Jun, Ge Hong, Wang Yu-feng. Survey on the methods of image segmentation research[J]. Computer Engineering & Science,2009,31(12):58-61.
[13] Assidiq, Abdulhakam A. M, et al. Real time lane detection for autonomous vehicles[C]//International Conference on Computer and Communicaion Engineering,2008:82-88.
[14] Jianfeng Wang, Ye Wu, et al. Lane detection based on random hough transform on region of interesting[C]//IEEE Information and Automation,2010:1735-1740.
[15] 樊超,狄帅,等.一种基于直线模型的车道线识别算法研究[J].计算机应用研究,2012,29(1):326-332.
FAN Chao, DI Shuai, et al. Linear model based lane mark identification algorithm[J]. Application Research of Computers,2012,29(1):326-332.
[16] Kiryatin, Eldary, Brucksetin A M. A probabilistic hough transform[J]. Pattern Recognition,1991,24(4):303-316.
收稿日期:2015年10月7日,修回日期:2015年11月22日
作者简介:潘涛,男,硕士研究生,研究方向:智能检测与智能控制。吴晓波,男,教授,研究方向:检测技术。周晓龙,男,助理工程师,研究方向:测井仪器。张先超,男,硕士研究生,研究方向:光电检测。
中图分类号TP391
DOI:10.3969/j.issn.1672-9722.2016.04.035
Path Detection Algorithm Based on Linear Model
PAN Tao1WU Xiaobo1ZHOU Xiaolong2ZHANG Xianchao1
(1. Department of Logistics Imformation & Logistics Engineering, Logistics Engineering University, Chongqing401311)(2. CNPC Logging, Shanshan838202)
AbstractPath recognition is one of the key technologies of automatic guided vehicle based on image processing. A path detection algorithm based on linear road model is developed. An improved Otsu is used to segment the path image in the algorithm, while a fast median fitering and Sobel operator are adopted to remove point-like noise and extract path edge information. In order to extract the center line parameter of navigation path more accurately, central line fitting algorithm is proposed. Finally, the path detection and parameter extraction are realized by using the probabilistic Hough transform. The experimental results show that this algorithm can detect the navigation path parameters accurately and has good real-time performance.
Key Wordspath recognition, Otsu threshold, Sobel operater, Hough transform
