遗传算法优化的扩展卡尔曼滤波感应电动机速度估算
2016-08-11张文斌陈建清刘子超
周 浩,张文斌,陈建清,刘子超,苏 适
(1.昆明理工大学 机电工程学院,云南 昆明 650500;2.云南电力试验研究院,云南 昆明 650063)
遗传算法优化的扩展卡尔曼滤波感应电动机速度估算
周浩1,张文斌1,陈建清1,刘子超1,苏适2
(1.昆明理工大学 机电工程学院,云南 昆明 650500;2.云南电力试验研究院,云南 昆明 650063)
基于扩展卡尔曼滤波器(EKF)的电动机速度估算器,通常采用试错法来对EKF的噪声矩阵进行试验调整,这样造成EKF估算器具有效率低和估算精度不高的问题。研究使用遗传算法(GA)来优化EKF,得到最佳噪声矩阵。在感应电动机直接转矩控制(DTC)的Simulink仿真中,使用最佳噪声矩阵参数的EKF来估算电动机速度,得到了较好的估算效果。
速度估算;扩展卡尔曼滤波器;遗传算法;直接转矩控制
在高性能交流调速传动系统中,通常采用光电编码器等传感器对转速进行检测,但传感器带来了系统硬件成本增加、难以适应恶劣环境和系统可靠性降低等问题。这些问题促使国内外学者对无速度传感器控制技术进行了大量研究[1-4],并提出了很多比较实用且有效的速度估算器:龙贝格(LO)估算器、滑模(SMO)估算器和扩展卡尔曼滤波器(EKF)估算器。LO和SMO估算器针对的都是确定性系统,EKF估算器则适用于含有噪声的随机系统。LO和SMO估算器的增益矩阵是通过稳定性分析和极点配置来设计的,但由于电动机系统的非线性,基于线性理论的LO和SMO估算器难以应用。EKF估算器的增益矩阵是基于均方差误差最小原理得到的,在动态过程中,增益矩阵通过噪声协方差矩阵Q、R和权重矩阵G来进行实时更新,目的是在下一次得到最优的状态估计。EKF估算器不但可以提供实时状态估测的功能,并且同时将电动机控制系统的误差和测量噪声一并列入考虑,十分符合控制系统的现实物理特性,被认为是速度估算的最好方法;但是,使用试错法来调整EKF估算器噪声矩阵的效率十分低下。因此,使用遗传算法(GA)来优化EKF估算器噪声矩阵的研究,对高性能EKF估算器的工业应用具有重要的现实意义。
1 感应电动机速度估算器的设计
1.1感应电动机的离散扩展状态模型
EKF估算器是依托于电动机模型的一种状态估算器,本文采用的感应电动机动态电气模型有4个状态变量,分别为转子磁链(λdr,λqr)和定子电流(ids,iqs),而定转子电感(Ls,Lr)、互感LM、定转子电阻(Rs,Rr)和极数P是参数,定子电压矢量(Vds,Vqs)是输出。将转速ω0视为一个参数或状态包含在内,则电动机离散扩展模型表达如下[5]:

(1)式中,G(t)是权噪声矩阵;w(t)是状态模型的噪声矩阵(系统噪声);v(t)是输出模型的噪声矩阵(测量噪声);

噪声的协方差矩阵Q、R定义如下:
(2)
1.2基于EKF的速度估算器计算流程
基于EKF的速度估算器的递归形式可用式3~式8的方程来表示。
1)状态预测方程如下:
(3)
2)误差协方差矩阵估算方程如下:
(4)

3)卡尔曼滤波器增益计算方程如下:
(5)

4)状态估算方程如下:
(6)
5)误差协方差矩阵的更新方程如下:
(7)
上述方程中:
(8)
根据EKF估算器的基本原理,估算电动机转速的计算流程如图1所示。
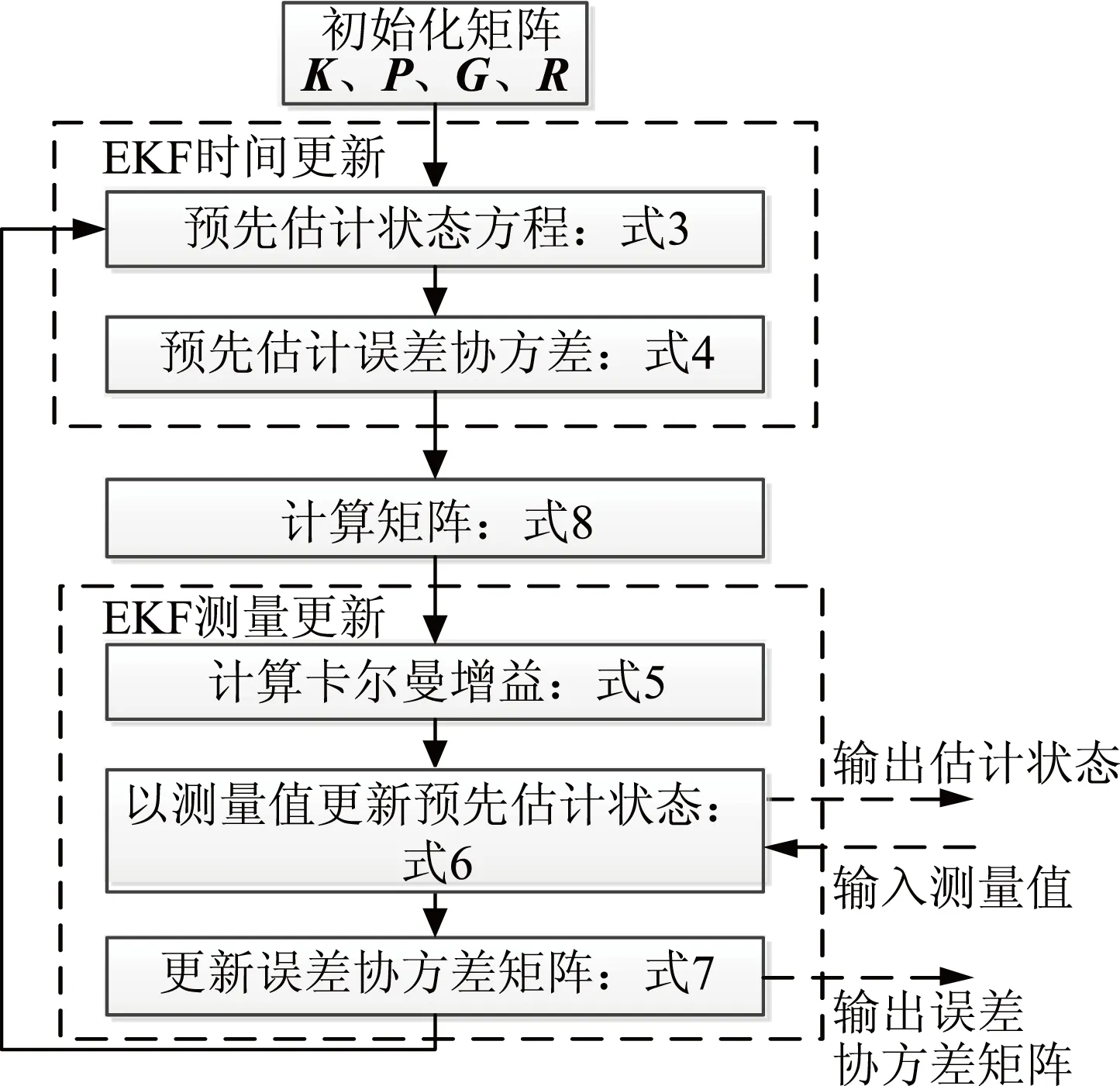
图1 EKF估算电动机转速的计算流程图
1.3应用遗传算法优化EKF的噪声矩阵

(9)
式中,s是实际速度;e是估计速度;n是数据样本数。
使用GA得到最优的噪声协方差和权系数矩阵的流程(见图2)及MATLAB函数的功能(见表1)。

图2 GA优化EKF的步骤

程序名称功能输入输出GA.m 设置GA参数,调用适应度函数Call_EKF.m的ga函数无最佳染色体Gd,Qd,RdCall_EKF.m 适应度估算,调用EKF_train.mdl计算mseGd,Qd,RdmseEKF_train.mdl EKF接收GA.m优化的噪声矩阵估算电动机速度Gd,Qd,Rd估算偏差yout
GA.m的代码如下:
function x1= GA()
X0=rand(1,12);
lb = ones(1,12)*0.00001;
lb=lb';
ub=ones(1,12)*10;
ub=ub';
options = gaoptimset(@ga);
options = gaoptimset(options,'MutationFcn',@mutationadaptfeasible);
options=gaoptimset(options,'PopulationSize',8);
options=gaoptimset(options,'Generations',10);
options=gaoptimset(options, 'EliteCount',2);
options=gaoptimset(options, 'CrossoverFraction',0.9);
options = gaoptimset(options,'PlotFcns',{@gaplotbestf },'Display','iter');
[xx,fval,exitflag]=ga(@Call_EKF,12,[],[],[],[],lb, ub,[], options)
x1=xx;
[A,B]=size(x1);
Error=sum(x1.^2)/A;
…
Call_EKF.m的代码如下:
function s=Call_kal(xx)
x1=xx;
…
[tout,xout,yout]=sim('kal_train',0.5);
[A,B]=size(yout);
y=yout;
y(1)=[];
s=sum(y.^2)/A;
end
EKF估算器的参数矩阵训练模块如图3所示。电动机在额定电源和额定负载下工作。EKF估算器输入为三相额定电压和定子三相电流信号,输出为估算到的角速度w0。
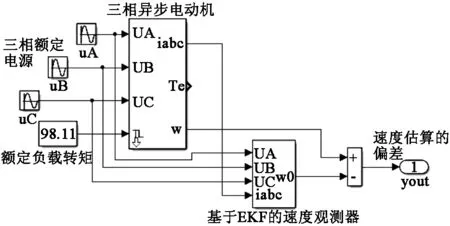
图3 EKF的参数矩阵训练模块(EKF_train.mdl)
2 Simulink仿真实验
2.1最佳EKF噪声矩阵
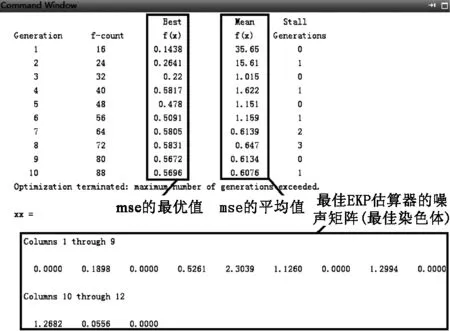
图4 MATLAB命令窗口显示的仿真结果
2.2无速度传感器的直接转矩控制
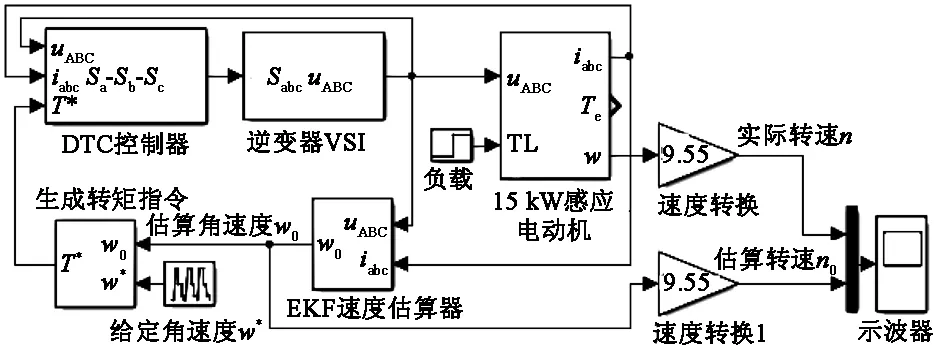
图5 EKF估算转速的DTC仿真模型
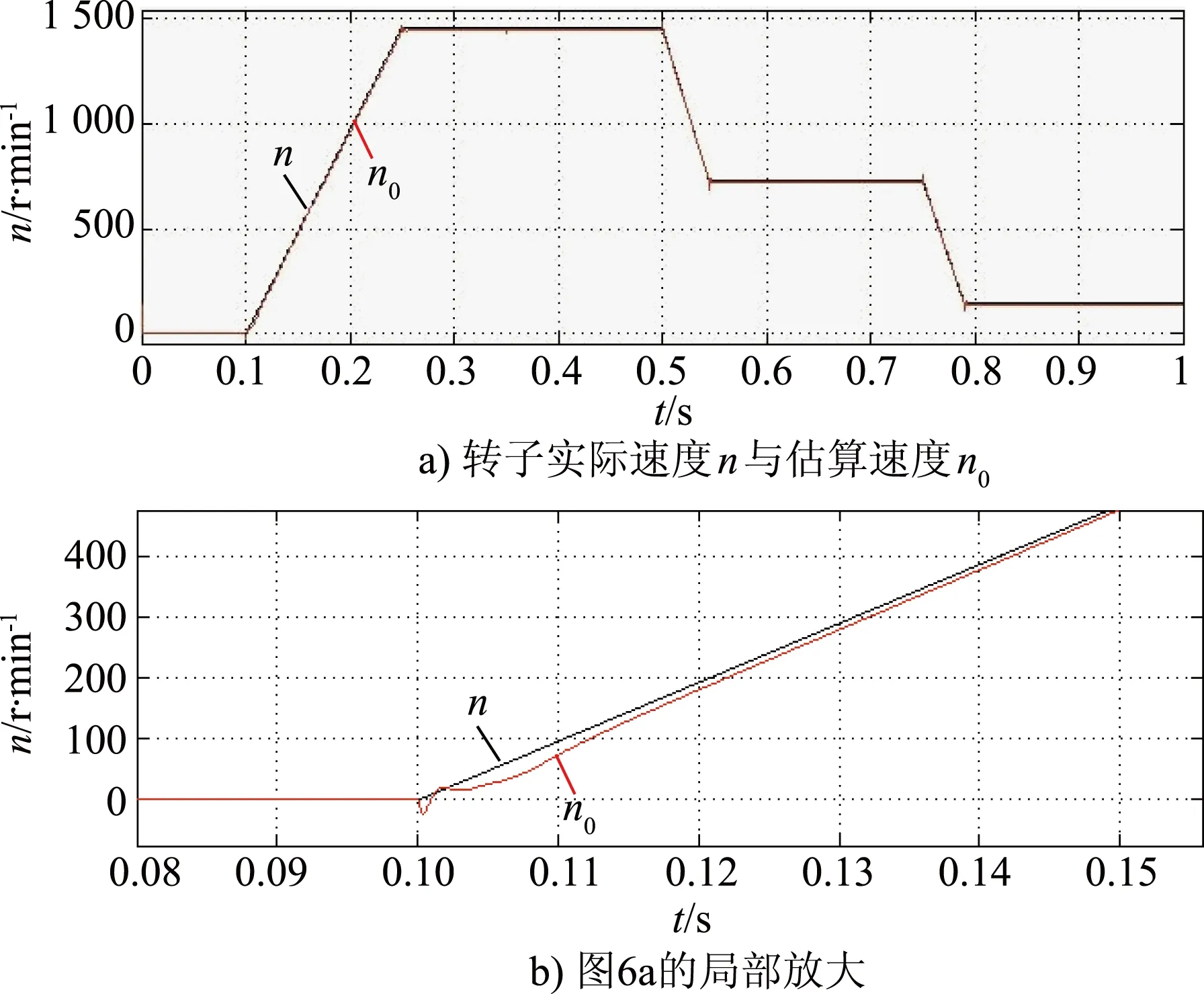
图6 仿真结果
3 结语
本文在GA优化EKF的基础上,短时间内选择出了最佳的噪声协方差矩阵和权重矩阵(最佳染色体)。EKF估算器估算转速的DTC仿真结果表明,使用最佳噪声矩阵参数的EKF估算器具有精度高、响应快和稳定性好的优点。该方法对其他类型电动机的无速度传感器控制也有很好的借鉴意义和实用价值。
[1]ManesC,ParasilitiF.AcomparativestudyofrotorfluxestimationininductionmotorswithanonlinearobserverandtheextendedKalmanfilter[C]//IECON.Bologna:IEEE, 1994.
[2] 奚国华,沈红平.异步电机无速度传感器直接转矩控制系统[J].中国电机工程学报,2007,27(21):76-82.
[3]AlsofyaniIM,IdrisNRN.UsingNSGAIImultiobjectivegeneticalgorithmforEKF-basedestimationofspeedandelectricaltorqueinACinductionMachines[C]//PEOCO.Langkawi:IEEE, 2014.
[4]ShiKL,ChanTF.SpeedestimationofaninductionmotordriveusinganoptimizedextendedKalmanfilter[J].IEEETransonIndustrialElectronics, 2002, 49(1):124-133.
[5]LewisFL.Appliedoptimalcontrol&estimation[M].NewYork:Prentice-Hall, 1992.
责任编辑郑练
GA-optimizedExtendedKalmanFilterforInductionMotorSpeedEstimation
ZHOUHao1,ZHANGWenbin1,CHENJianqing1,LIUZichao1,SUShi2
(1.FacultyofMechanicalandElectricalEngineering,KunmingUniversityofScienceandTechnology,Kunming650500,China; 2.YunnanElectricPowerTestandResearchInstitute,Kunming650063,China)
ThenoisematricesofEKFspeedestimatorareusuallytunedexperimentallyusingatrial-and-errormethodinEKFobserver,causingEKFdonotyieldthebestdriveperformance.Thegeneticalgorithm(GA)isusedtooptimizeEKFforgettingthebestnoisematrices.Intheinductionmotordirecttorquecontrol(DTC)ofthesimulinksimulation,usingtheEKFofthebestnoisematricestoestimatethemotorspeed.Theresultsshowthattheproposedmethodhasagoodeffectonthespeedestimation.
speedestimation,EKF,GA,DTC
2016-03-09
TM346.2A
周浩(1989-),男,硕士研究生,主要从事智能交流传动系统等方面的研究。
