永磁同步电动机转速伺服系统PI控制器的一种新设计方法
2016-08-10左月飞南京航空航天大学自动化学院南京210016
左月飞 刘 闯 张 捷 符 慧 张 涛(南京航空航天大学自动化学院 南京 210016)
永磁同步电动机转速伺服系统PI控制器的一种新设计方法
左月飞刘闯张捷符慧张涛
(南京航空航天大学自动化学院南京210016)
提出了PI控制器的一种新设计方法,将所有已知和未知的扰动集中为总扰动,简化系统模型,再用积分器作为扰动观测器对总扰动进行观测并补偿。新型PI控制器中的参数与系统性能之间的关系非常简单,易于整定。针对连续变化输入,新型PI控制器引入了输入微分前馈,具有更好的跟踪性能,且输入微分前馈仅是一个微分器,与电动机参数无关,进一步简化了控制器的设计。采用离散最速跟踪微分器对阶跃输入安排过渡过程,可以消除PI控制系统阶跃响应的超调,同时提高系统阶跃响应对控制器参数的不敏感性。实验结果验证了所提方法的有效性。
永磁同步电动机PI控制器参数整定连续变化输入输入微分前馈过渡过程
0 引言
永磁同步电动机(Permanent Magnetic Synchronous Motor,PMSM)以其高功率/重量比、高转矩/惯量比、
高效率和具有一定鲁棒性等优点逐渐取代直流电动机和其他电励磁的电动机,被广泛应用于工业调速系统中。传统的PMSM转速伺服系统大多采用双环线性控制结构,内环为电流环,外环为速度环。随着控制理论的发展,多种先进的复杂控制策略如非线性PI控制[1-3]、自适应控制[4,5]、模糊控制[6]、滑模变结构控制[7]、自 抗扰控 制 (ActiveDisturbanceRejectionControl,ADRC)[8-11]等被应用于PMSM转速伺服系统中,但这些控制策略存在参数整定困难、算法复杂或存在抖振等问题。因此,在工业应用中占主导地位的控制仍是线性PI控制。
传统的PI控制器大多根据频域特性来整定控制器参数,文献[12,13]通过幅值裕度和相位裕度得到旨在获得最佳闭环特性的PID参数,文献[14]建立了较为精确的PMSM控制系统模型,并给出了控制器的PI参数的解析计算式。由于考虑了较多的非理想环节,整定方法较为复杂,且难以定量分析它们对系统性能的影响。传统的PI控制器多通过阶跃响应考察系统的跟踪性能,由于阶跃输入的微分量为脉冲信号,因此在建模时常忽略输入的微分量。然而,当输入为连续变化的信号时,忽略输入的微分量将产生建模误差。为此,文献[15]基于内模控制的原理提出前馈控制来提高系统的跟踪性能,但需要知道系统的精确数学模型。
针对传统PI控制器的控制参数与系统性能关系复杂的问题,本文借鉴ADRC的控制思想,将外部扰动、建模误差以及未建模扰动等所有已知和未知扰动集中为总扰动,然后用积分器作为扰动观测器对总扰动进行观测并补偿,得到新型PI控制器。新型PI控制器从传统PI控制器参数中分离出与电动机参数有关的控制增益,简化了控制器参数与系统性能的关系,从而简化参数整定过程。针对输入连续变化的场合,新型PI控制器中同样采用前馈控制的方法进行补偿,不同的是,由于模型得到简化,新型PI控制器的输入微分前馈(Input Derivative Feedforward,IDF)环节只是一个微分器,与电动机参数无关,进一步简化控制器的设计。利用新型PI控制系统能够在无扰动的情况下无误差地跟踪连续变化输入,采用文献[16]提出的改进型离散最速跟踪微分器对阶跃输入安排过渡过程,可以消除阶跃响应的超调,并且可同时提高系统阶跃响应性能对参数的不敏感性。最后通过实验验证了所提方法的正确性和实用性。
1 新型PI控制器的设计
1.1PMSM的数学模型
本文研究的是表贴式永磁同步电动机,则其在转子磁场定向的同步旋转坐标系(d-q坐标系)下的机械运动方程为

式中,J为系统的转动惯量,kg·m2;B为系统的粘滞摩擦系数,N·m/(rad/s);TL为负载转矩,N·m;Ω为机械角速度,rad/s;Kt为转矩常数,N·m/A;iq为交轴电流,A。
1.2误差反馈控制律设计



定义机械角速度给定值v与反馈值x1之差为角速度跟踪误差es,即es=v-x1,则由式(3)可得角速度跟踪误差的状态方程为

采用线性比例反馈控制律,即

式中,kp为控制器的比例系数。
结合式(4)和式(5)可得控制量为

式(6)中的实际状态x1和x2未知,可通过传感器测量或用观测器对其进行观测。
通常,角速度可通过对角度信号直接微分得到,将其定义为y,并设y=x1+δns,其中δns为角速度Ω的测量噪声。用y代替x1,则角速度跟踪误差变为es=v-y。
系统无扰动时,采用比例控制即可实现无稳态误差,系统有扰动时,采用比例积分控制即可消除稳态误差。由此可知,积分的作用就是抵消扰动对系统的影响,或积分器能够观测扰动。将x2替换为跟踪误差的积分,得到PI控制器下的控制量为


由于采用了积分器且输出存在限幅,本文采用遇限停止积分的抗积分饱和方法,于是得到新型PI控制器的结构框图如图1所示。转速环传统PI控制器的结构框图如图2所示,PMSM矢量控制系统结构框图如图3所示。对比图1和图2可看出,新型PI控制器与传统PI控制器在结构上的区别为:新型PI控制器多了一个输入微分前馈环节和控制增益环节。

图1 转速环新型PI控制器结构框图Fig.1 Block diagram of the novel PI controller for speedloop

图2 转速环传统PI控制器结构框图Fig.2 Block diagram of traditional PI controller for speedloop
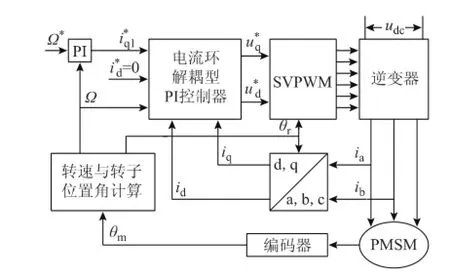
图3 矢量控制系统结构框图Fig.3 Block diagram of vector control system
1.3系统响应
将式(7)代入式(4)可得闭环系统的输出为

式中,λc(s)为闭环系统的特征多项式,λc(s)=s2+ kps+ki。
当无IDF时,系统在给定作用下的传递函数为

2 新型PI控制系统的性能分析
2.1系统对时变输入的跟踪性能
在连续变化输入(如正弦给定)的作用下,输入的微分量对应的控制量通常能够被系统响应,因此输入微分前馈可以起作用。由式(9)知,新型PI控制系统能够在无扰动的情况下无误差地跟踪连续变化输入。由式(10)知,传统PI控制系统对连续变化输入的跟踪存在相位滞后,跟踪误差较大。
2.2系统的阶跃响应


式中,ωd为阻尼自然频率,rad/s;t为时间,s;φ为振荡角,rad;ω1和ω2为两个不同的衰减振荡频率,rad/s;m为振荡频率比;a、b为临时变量。以上参数的计算公式如下

由式(12)和式(13)可知,超调量σ%随阻尼比ζ的增大而减小,与无阻尼自然频率ωn无关。百分超调量σ与阻尼比ζ间的关系如图4所示。由图4可看出,增大阻尼比可减小超调量,但并不能消除超调量。另外,增大阻尼比会减小阻尼自然频率ωd,导致系统响应变慢。因此,为获得较好的阶跃响应,需同时增大ζ和ωn,但这受限于系统噪声。

图4 百分超调量与阻尼比间的关系Fig.4 The relationship between overshoot and damping ratio
2.3系统的抗扰性能及抑制测量噪声性能
由式(9)可得,系统在扰动作用下的传递函数和在测量噪声作用下的传递函数分别为

当ζ=1.0、ωn分别为30、60和90时,抗扰系统和抑制测量噪声系统的频域特性曲线如图5所示。由图5可看出,ωn越大,则抗扰系统的低频幅值越小,抑制测量噪声系统的高频幅值越大,而谐振幅值不变。因此,ωn越大,系统抗低频扰动的能力越强,阶跃响应越快,且超调量不受影响,但抑制测量噪声能力越差。


图5 不同ωn时抗扰系统和抑制测量噪声系统的频域特性Fig.5 Frequency-domain characteristic of anti-disturbance system and measurement noise suppression system under different undamped natural frequency ωn
当ωn=60、ζ分别为0.5、1.0和2.0时,抗扰系统和抑制测量噪声系统的频域特性曲线如图6所示。由图6可看出,ζ越大,则抗扰系统在频率接近ωn处的幅值越小,抑制测量噪声系统的高频幅值越大,而谐振幅值越小。因此,ζ越大,系统对频率接近自然频率ωn的扰动抑制能力越强,阶跃响应越快,且超调量越小,但抑制测量噪声能力越差。
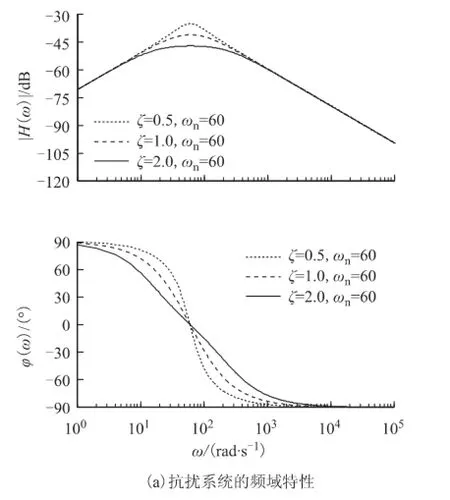

图6 不同ζ时抗扰系统和抑制测量噪声系统的频域特性Fig.6 Frequency-domain characteristic of anti-disturbance system and measurement noise suppression system under different damping ratio ζ
由式(9)可得新型PI控制系统的输出

于是,式(7)中的积分项经Laplace变换为

由式(17)可知,积分器观测到的扰动项中包含测量噪声的微分信号。ωn越大,则积分器对扰动的观测速度越快,系统抗扰性能越好,但同时噪声也越大,即系统抗扰性能与抑制测量噪声性能之间存在矛盾。对比式(10)和式(15)可知,系统在输入作用下的传递函数和系统在测量噪声下的传递函数相同,因此系统的阶跃响应快速性与抑制测量噪声性能之间也存在矛盾。
3 安排过渡过程以消除超调
新型PI控制系统能够在无扰动的情况下无误差地跟踪连续变化输入,但阶跃响应却存在超调,原因就在于阶跃输入下的输入微分前馈环节不起作用。如果对阶跃输入安排过渡过程,减小输入的微分量以便输入微分前馈环节能够起作用,则可消除系统阶跃响应的超调。
文献[8]提出了多种过渡过程,为使系统能对输入的微分量有较好的响应,应选择能使输入微分量缓慢变化的过渡过程。因此,本文采用离散最速跟踪微分器(DFTD)来安排过渡过程。由于文献[8]提出的DFTD存在超调的问题,为此采用文献[16]中改进后的DFTD,其结构框图如图7所示。
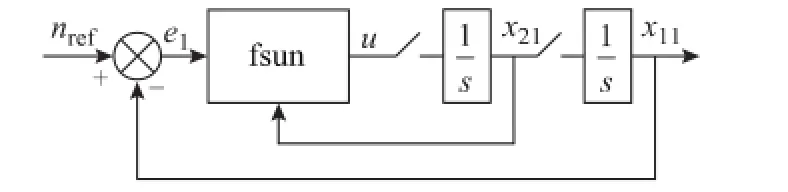
图7 DFTD的结构框图Fig.7 The block diagram of DFTD
图7中x11为安排过渡过程后的新给定,x21为新给定的微分,对应的离散系统方程及其中的最速控制综合函数fsun的算法公式分别为

式中,h为计算步长;nref为转速给定,r/min;ceil(m0)表示取比m0大的最小整数。
假设过渡过程的时间为T,则函数fsun中的r及x21的最大值x21m分别为
若给定nref=800 r/min,则T分别为0.15 s、0.10 s 和0.05 s时,r分别为14 200、32 000和128 000。
4 实验验证
为验证所提控制方法的有效性,对采用新型PI控制器永磁同步电动机调速系统的阶跃响应、抗扰性能、跟踪正弦输入性能进行了实验验证。实验中PMSM参数如表1所示。

表1 电动机参数Tab.1 Motor parameters
永磁同步电动机调速系统的实验平台采用dSPACE实时仿真系统DS1103,利用快速原型法通过Simulink自动完成代码生成与下载。实验中的逆变器开关频率为10 kHz,通过PWM中断触发电流采样和占空比更新。
实验中所用的负载曲线如图8所示。由图8可看出,加载过程时间较长,且负载变化率不恒定,而卸载时间较短(约80 ms),且负载变化率近似恒定,因此只做了卸载实验。
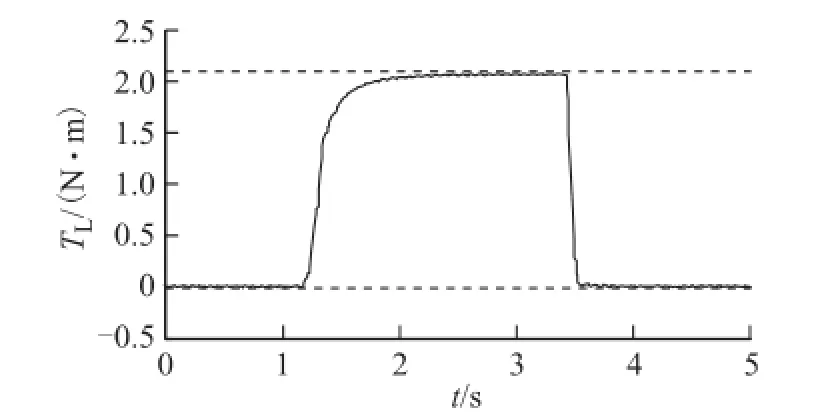
图8 实验负载曲线Fig.8 Load curve in experiment
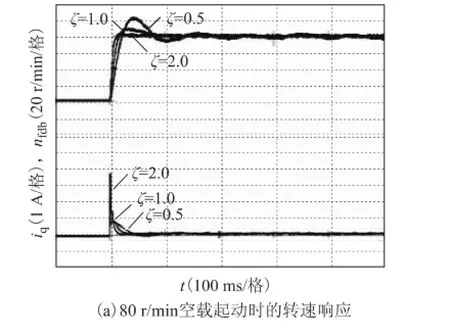

图9 不同ζ下起动和变负载时的动态响应Fig.9 Dynamic response when starting and load varing under different damping ratio


图10 不同ωn下起动和变负载时的动态响应Fig.10 Dynamic response when starting and load varingunder different undamped natural frequency

表2 不同ζ和ωn时的超调量和转速变化量Tab.2 Overshoot and speed variation under different ζ and different ωn
由表2可看出,80 r/min起动时超调量的实验值与理论值基本相符,验证了理论的正确性,偏差是由实际起动时存在负载转矩导致的。800 r/min起动时超调量的实验值比80 r/min时的还要小,这是由系统控制量饱和导致的。卸载时转速变化量的实验值与理论值也基本相符,存在较小的偏差是由于理论卸载曲线与实际卸载曲线之间存在偏差导致的,并不影响ζ和ωn对系统抗扰性能的影响性质。
给定500 r/min、5 Hz的正弦转速,取ζ=1、ωn分别为60和200时,系统的正弦跟踪响应如图11所示。由图11a可看出,传统PI控制器下的跟踪误差为±120 r/min,而新型PI控制器下的跟踪误差只有±10 r/min。由图11b可看出,传统PI控制器下的跟踪误差为±12 r/min,而新型PI控制器下的跟踪误差只有±1 r/min。新型PI控制器下仍存在较小的跟踪误差而不是理论情况下的零,这是由于实际系统中存在摩擦转矩等负载扰动。对比图11a和图11b可看出,增大ωn尽管提高了系统的抗扰性能,但同时也增大了系统的噪声,与理论分析结果一致,进一步验证了理论分析的正确性。

图11 跟踪正弦给定时的动态响应Fig.11 Dynamic response of tracking sine reference
给定阶跃转速800 r/min,安排过渡时间T分别为0.15 s、0.10 s和0.05 s的3种过渡过程,ζ=1,ωn= 60,传统PI控制系统和新型PI控制系统下的空载起动实验波形如图12所示。由图12可看出,传统PI控制系统在T分别为0.15 s、0.10 s和0.05 s时的超调量分别为10%、10%和5%,新型PI控制系统在T为0.15 s时的超调量约为0.4%,在T分别为0.10 s和0.05 s时均无超调。新型PI控制系统在T为0.15 s时存在超调是由控制量饱和导致的,不过此超调量相比于传统PI控制器下的10%小得多。以上结果验证了安排过渡过程的有效性。


图12 安排过渡过程时的阶跃响应Fig.12 Step response with transient profile
5 结论
针对传统PI控制器存在参数整定困难、对时变输入跟踪性能差等问题,本文基于自抗扰控制器的设计思想提出了PI控制器的一种新设计方法。
新型PI控制器的系数kp、ki与系统阶跃响应、抗扰性能以及对时变输入的跟踪性能之间的关系非常简单,易于整定。ζ越大,则系统的阶跃响应越快,且超调量越小,对频率接近ωn的扰动抑制能力越强,但恢复时间越长,且系统对测量噪声的抑制能力越差;ωn越大,则系统的阶跃响应越快,且超调量不受影响,对中低频扰动的抑制能力越强,但对测量噪声的抑制能力越差。
对于输入连续变化的应用场合,由于存在输入微分前馈环节,新型PI控制器相对于传统PI控制器具有更好的跟踪性能。另外,输入微分前馈环节只是一个微分器,与电动机参数无关,简化了控制系统的设计。
新型PI控制器下的系统阶跃响应仍存在超调,且超调量只与阻尼比有关;尽管通过增大阻尼比可以减小超调量,但并不能消除超调量;系统的阶跃响应快速性与抑制噪声性能之间存在矛盾,抗扰性能与抑制噪声性能之间也存在矛盾。
通过安排过渡过程,将阶跃输入变为连续变化输入,从而可以消除阶跃响应的超调,另外还可以提高系统阶跃响应对控制参数的不敏感性。
[1]王江,王静,费向阳.永磁同步电动机的非线性PI速度控制[J].中国电机工程学报,2005,25(7): 125-130.
Wang Jiang,Wang Jing,Fei Xiangyang.Nonlinear PI speed control of permanent magnetic synchronous motor [J].ProceedingsoftheCSEE,2005,25(7): 125-130.
[2]王瑞萍,皮佑国.基于分数阶PI速度控制器的永磁同步电动机控制[J].电工技术学报,2012,27 (11):69-75.
Wang Ruiping,Pi Youguo.Fractional-order PI speed controllerfor permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society,2012,27(11):69-75.
[3]李虹,尚佳宁,陈姚,等.基于fal函数的非线性PI控制器在DC-DC变换器中的应用.电工技术学报,2014,29(S1):326-331.
LiHong,ShangJianing,ChenYao,etal.The applications of nonlinear PI cotroller based on the fal function in the DC-DC converter[J].Transactions of ChinaElectrotechnicalSociety, 2014, 29(S1): 326-331.
[4]鲁文其,胡育文,梁骄雁,等.永磁同步电机伺服系统抗扰动自适应控制[J].中国电机工程学报,2011,31(7):75-81.
Lu Wenqi,Hu Yuwen,Liang Jiaoyan,et al.Antidisturbanceadaptivecontrolforpermanentmagnet synchronous motor servo system[J].Proceedings of the CSEE,2011,31(7):75-81.
[5]梁骄雁,胡育文,鲁文其.永磁交流伺服系统的抗扰动自适应控制[J].电工技术学报,2011,26 (10):174-180.
LiangJiaoyan, HuYuwen, LuWenqi.Antidisturbance adaptive control of permanent magnet AC servo system[J].Transactions of China Electrotechnical Society,2011,26(10):174-180.
[6]张洪帅,王平,韩邦成.基于模糊PI模型参考自适应的高速永磁同步电机转子位置检测[J].中国电机工程学报,2014,34(12):1889-1896.
Zhang Hongshuai,Wang Ping,Han Bangcheng.Rotor position measurement for high-speed permanent magnet synchronous motorsbasedonfuzzyPIMRAS[J]. Proceedings of the CSEE,2014,34(12):1889-1896.
[7]黄佳佳,周波,李丹,等.滑模控制永磁同步电动机位置伺服系统抖振[J].电工技术学报,2009,24 (11):41-47.
Huang Jiajia,Zhou Bo,Li Dan,et al.Sliding mode control for permanent magnet synchronous motor servo system[J].TransactionsofChinaElectrotechnical Society,2009,24(11):41-47.
[8]韩京清.自抗扰控制技术—估计补偿不确定因素的控制技术[M].北京:国防工业出版社,2008.
[9]LiShihua,XiaCunjian,ZhouXuan.Disturbance rejectioncontrolmethodforpermanentmagnet synchronousmotorspeed-regulationsystem[J]. Mechatronics,2012,22(6):706-714.
[10]Li Shihua,Liu Huixian,Ding Shihong.A speed control for a PMSM using finite-time feedback control and disturbancecompensation[J].Transactionsofthe Institute of Measurement and Control,2010,32(2): 170-187.
[11]李世华,丁世宏,都海波,等.非光滑控制理论与应用[M].北京:科学出版社,2013.
[12]Li Keyu.PID tuning for optimal closed-loop performance withspecifiedgainandphasemargins[J].IEEE Transactions on Control Systems Technology,2012,21 (3):1024-1030.
[13]王莉娜,朱鸿悦,杨宗军.永磁同步电动机调速系统PI控制器参数整定方法[J].电工技术学报,2014,29(5):104-117.
Wang Lina,ZhuHongyue,YangZongjun.Tuning method for PI controllers of PMSM driving system[J]. Transactions of China Electrotechnical Society,2014,29(5):104-117.
[14]Lidozzi A,Solero L,Crescimbini F,et al.Direct tuning strategy for speed controlled PMSM drives[C]// IEEE International Symposium on Industrial Electronics (ISIE),Bari,2010:1265-1270.
[15] 黄科元,周滔滔,黄守道,等.永磁伺服系统基于微分自适应补偿的快速无超调控制策略[J].电工技术学报,2014,29(9):137-144.
Huang Keyuan,Zhou Taotao,Huang Shoudao,et al. Non-overshoot and fast response control of PMSM servo system based on differential adaptive compensation[J]. Transactions of China Electrotechnical Society,2014,29(9):137-144.
[16] 孙彪,孙秀霞.离散系统最速控制综合函数[J].控制与决策,2010,25(3):473-477.
SunBiao,SunXiuxia.Optimalcontrolsynthesis functionofdiscrete-timesystem[J].Controland Decision,2010,25(3):473-477.
左月飞男,1989年生,博士研究生,研究方向为永磁同步电机伺服系统控制。
E-mail:zuo@nuaa.edu.cn(通信作者)
刘闯男,1973年生,教授,博士生导师,研究方向为现代交流调速、开关磁阻电机、航空航天电源系统、新能源发电等技术。
E-mail:lc@nuaa.edu.cn
A Novel Design Method of PI Controller for Permanent Magnetic Synchronous Motor Speed Servo System
Zuo YuefeiLiu ChuangZhang JieFu HuiZhang Tao
(College of AutomationNanjing University of Aeronautics and AstronauticsNanjing210016China)
A novel design method of the PI controller is proposed in this paper.The controller lumps various known and unknown quantities that affect the system performance into a total disturbance,simplifies the system model,and then uses the integrator as an observer to realize total disturbance estimation and rejection.The parameters in the novel PI controller have simple relationship with system performance,and are easy to tune.With the input derivative feedforward(IDF)used in the novel PI controller,better performance of tracking the continuous varying input can be obtained.The IDF is just a differentiator irrelative to the parameters of the permanent magnetic synchronous motor(PMSM),which further simplifies the controller design process.The discrete fastest tracking differentiator(DFTD)is used to diminish the overshoot in the step response,which improves the parameter insensitivity of the system at the same time.Extensive experiments are performed to verify the validity of the proposed algorithm.
Permanent magnetic synchronous motor,PI controller,parameter tunning,continuously varying input,input derivative feedforward,transient profile
TM351
国家自然科学基金(51377076)、江苏省“六大人才高峰”项目(YPC13013)和江苏省产学研资金(BY2014003-09)资助。
2015-03-27改稿日期 2015-05-24