一种快速自动增益控制方案的设计与实现*
2016-08-10王占友崔立林陈景兵
王占友 何 琳 崔立林 陈景兵
(海军工程大学振动与噪声研究所船舶振动噪声重点实验室 武汉 430033)
一种快速自动增益控制方案的设计与实现*
王占友何琳崔立林陈景兵
(海军工程大学振动与噪声研究所船舶振动噪声重点实验室武汉430033)
摘要模拟信号的采集及处理技术是一项应用广泛的技术,但在一些特殊领域对信号的采集精度要求较高,要求尽量将其幅值控制在合理范围内,即小信号尽量放大而大信号尽量不削波,才能保证所采集的信号信噪比高且不失真,这是固定增益无法做到的。为此,论文提出了一种快速自动增益控制方案,利用模糊控制适用于非线性、不确定性系统的特点,同时设计了超限检测功能,能够对信号突变导致的超限及时反应,从而保证了论方案能够实时地根据信号强度快速改变增益,有效地解决了这一问题。实验结果表明,论文提出的快速自动增益控制方案效果良好。
关键词模拟信号采集; 自动增益; 模糊控制
Class NumberTP273
1引言
模拟信号的采集及处理技术应用广泛[1~3],但在一些特殊领域对信号的采集精度要求较高,例如在故障诊断领域[4~6],信号采集的质量将对结果产生直接影响。高质量的信号有助于得出正确的结果,低质量的信号往往会导致错误的结论。实际的物理信号变化范围大且是随机的。例如设备上的加速度传感器,当设备不工作时,其输出信号幅值小,当设备正常工作时,其输出信号幅值会变大,当设备突发故障时其输出信号幅值会变得非常大,甚至超出检测范围。此种情况下,如果信号采集系统使用固定增益,势必会顾此失彼。例如,如果只考虑信号的最大值不失真,势必会采用最安全的通道增益进行采集,这对于小信号而言信噪比不高,系统本身的噪声对信号的影响会很大,影响分析结果;如果只为了提高信噪比,系统会使用较大的增益进行数据采集,这对于大信号或者突然变大的信号而言,会造成削波,同样会对分析结果造成较为严重的影响。为保证高精度采集数据,系统要求当信号较小时,使用较大的增益进行采集,提高信噪比;当信号突然变大或者一些大的瞬态噪声出现时,系统会快速将增益切换到合理范围,保证信号的完整性。因此,设计一种快速自动增益方案势在必行。为此,本文利用模糊控制适用于非线性、不确定性系统的特点[7~12]设计了一种快速自动增益控制方案,并设计了超限检测功能,能够实时检测信号超限,较好地解决了这一问题。
2自动增益方案设计
自动增益方案的原理如图1所示,该方案包括信号调理模块、模数转换模块、峰值计算模块、超限检测模块、模糊推理模块、增益调整模块及输出模块。信号调理模块是嵌入到前向通道中的模块,该模块通过配置程控增益放大器及其它必要的电路完成增益控制功能;模数转换模块完成模拟信号的AD转换;峰值计算模块实时计算并判断信号峰值;模糊推理模块完成增益控制量的推理计算;超限检测模块实时检测信号是否超量程;增益调整模块根据模糊推理模块的输出,输出增益控制编码给信号调理模块,完成自动增益的控制;输出模块将采集的数据还原输出给系统。其工作原理为:原始信号经过信号调理模块后分为两路,一路直接进入模数转换模块,另一路进入超限检测模块用于判断是否超量程。信号经过模数转换后,一路进入输出模块,另一路进入峰值计算模块,信号进入峰值计算模块后计算信号的峰值,并与目标峰值比较后得到两者的误差及误差变化率,作为模糊推理模块的输入。模糊推理模块将峰值误差及变化率作为输入,通过将二者模糊化,再进行模糊推理,最后解模糊输出当前增益编码给增益调整模块。增益调整模块根据该编码调整增益,完成自动增益控制。
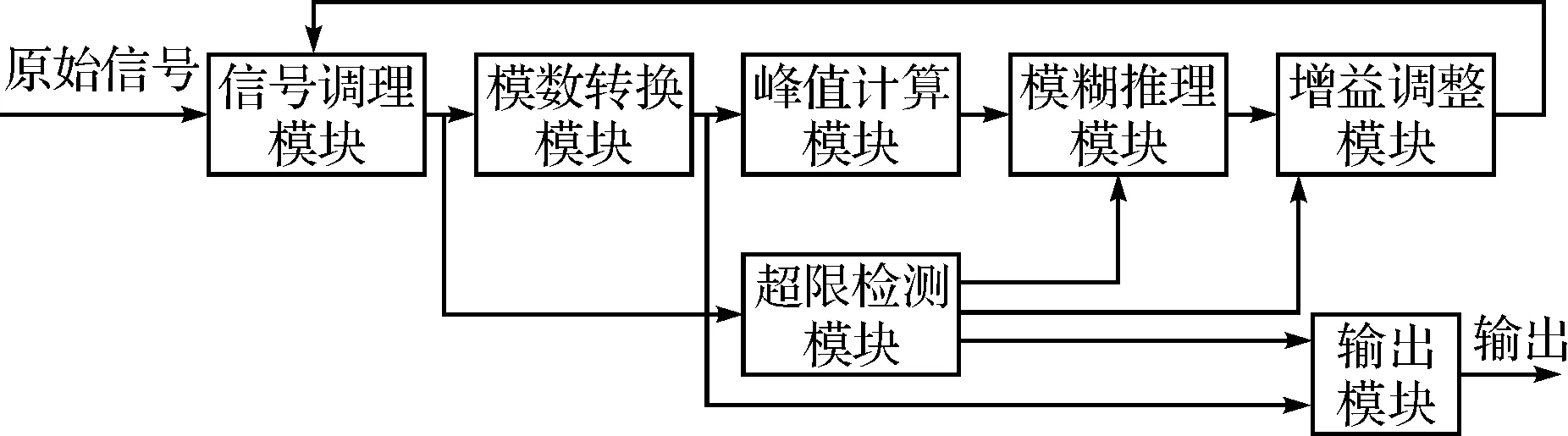
图1 方案原理图
3主要功能模块的设计
3.1模糊推理模块
模糊推理模块是核心,该模块包括三个工作步骤,分别为模糊化、模糊推理和解模糊。
模糊化:将输入精确量(输入量为峰值误差及其变化率,输出量为控制增益)转换为模糊量。利用式(1)对基本论域进行离散、分档,将基本论域变换为模糊论域,再确定输入输出的语言变量及隶属函数,完成模糊化过程。
(1)
式中:x∈[a,b],n为离散度,a,b为基本论域的下限值和上限值。
模糊推理:根据设计的控制规则对峰值误差及其变化率进行推理(采用MAX-MIN关系合成推理法),最终得出增益模糊量;根据上下文可知,本模糊推理模块是双输入(峰值误差及其变化率)单输出(控制增益)系统,利用Matlab将模糊蕴含关系矩阵计算好后存入微控制器,运行时直接查表可得结果,大大提高了效率。
解模糊:将增益模糊量清晰化,输出给增益调整模块对模拟信号进行调理。模糊推理后得到是增益的模糊量,采用重心法解模糊,计算公式为
(2)
式中:zi为推理结论模糊集中各元素,U(zi)为zi对该模糊集的隶属度,u为增益的清晰量。
由式(2)解模糊后,通过式(3)进行论域变换后得到实际控制量:
(3)
式中:Umin、Umax分别是基本论域的下限和上限,Uomin、Uomax分别是模糊论域的下限和上限。
模糊推理模块具体设计如下:
将各语言变量在论域上的模糊子集的隶属函数均取用下式:
μ(x)=exp(-(x-c)2/2b2)
(4)
设当前峰值误差E、误差变化率EC及增益K的语言值为:{负大,负中,负小,0,正小,正中,正大},用字母{NB,NM,NS,0,PS,PM,PB}表示,三者的论域为(离散度n=3):
{-3,-2,-1,0,+1,+2,+3}
根据本控制装置的要求制定了模糊控制规则,如表1所示。
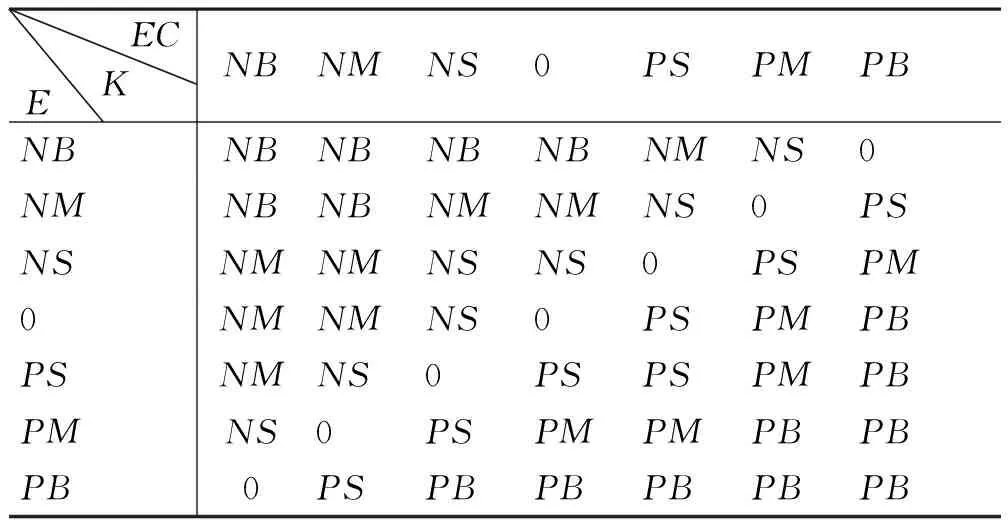
表1 增益K的模糊控制规则表
根据表1可计算出每条控制规则对应的模糊关系子矩阵Ri(i=1,2,…,49),通过式(5)计算出总的模糊蕴含关系矩阵R:
R=R1∪R2…Rn
(5)
将该矩阵存入微控制器,实时检测计算峰值的误差及其变化率并通过式(6)计算输出增益模糊量:
U=(E×EC)·R
(6)
3.2超限检测模块
超限检测模块采用硬件电路方式实现,保证中断的快速性。其核心元件为LM139比较器,设计必要的外围电路实现其功能。其原理图如图2所示。图中,实际信号由4脚和7脚接入LM139,用于比较的量程上限电压值由5脚接入,量程下限电压值由6脚接入,由图可知,当信号在正常范围时,比较器不翻转,正常输出1,当信号值大于上限电压或低于下限电压时,比较器翻转为0,从而及时发出中断信号。电路的输出由电阻R1上拉到电源电压VCC,同时设置过压保护电路,由D1构成电压钳位电路,将最大电压钳位VCC之内,保护微控制器不会过压损坏。

图2 超限检测电路
3.3峰值计算模块
实时计算并判断信号峰值,其峰值基本判别方法为:采集一组数据搜索最大值并结合数据变化趋势(判别拐点)来确定峰值。信号峰值确定后与目标峰值作差,两者的误差及误差变化率作为模糊推理模块的输入。
4增益控制流程设计
软件流程图如图3所示。开始时,将通道增益试设为1,然后检测超限检测模块是否输出中断信号。如果没有收到中断信号,则进入正常采集流程;若此时收到中断信号,则将增益切换至最安全增益,继续检测中断信号。若仍然收到中断信号,则判为超量程;否则正常采集。数据采集后首先进入输出模块输出数据, 然后进行峰值计算、模糊推理及增益调整,增益控制完成后再判断是否收到中断信号,是则将推理模块所有变量复位,然后增益切换至最安全增益,继续判断是否超量程,是则判为超量程;否则继续采集数据。
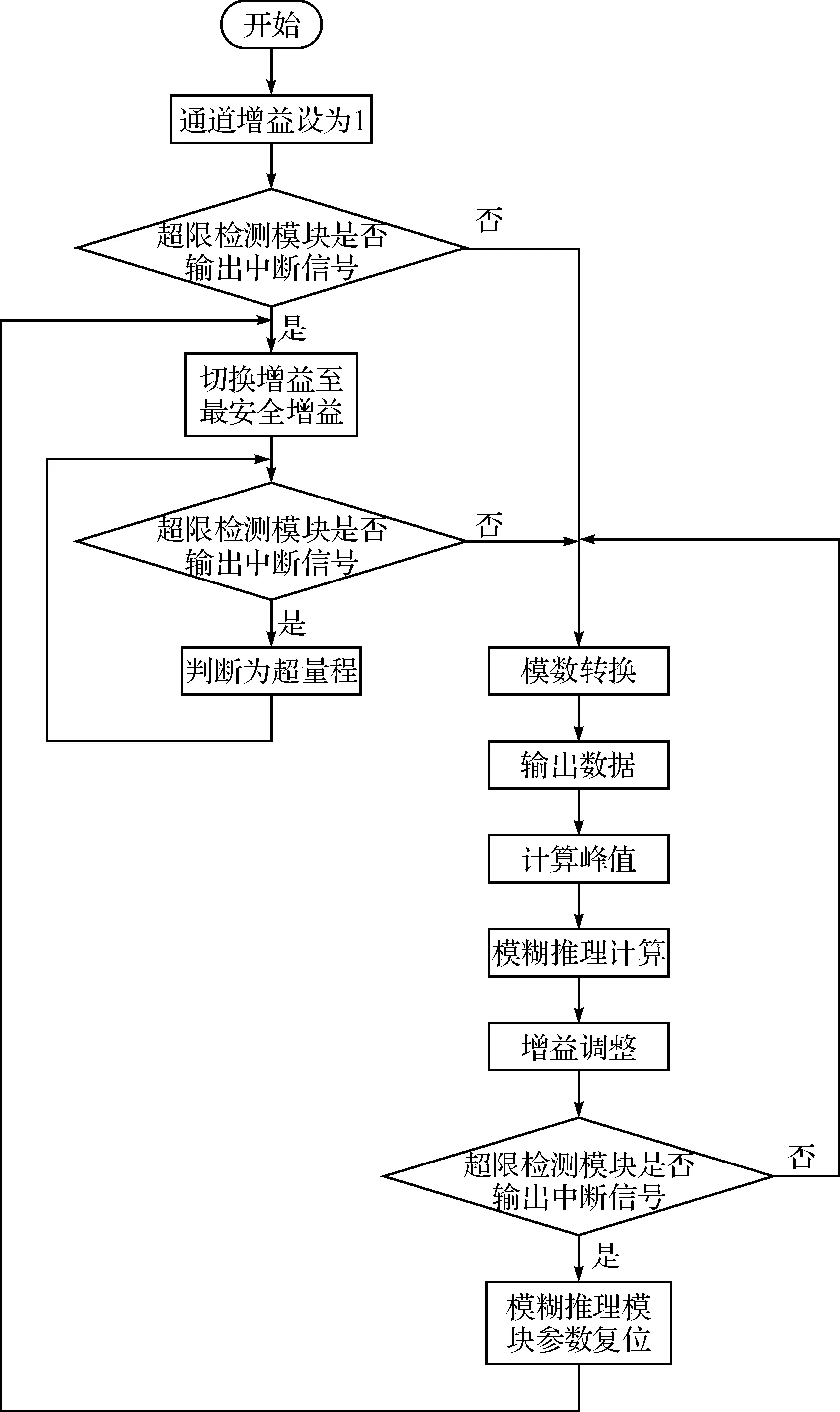
图3 增益控制流程图
5实验验证
为验证本方案的有效性,针对图4和图5两种信号进行了实验验证。信号由任意波形发生器产生,通过采用带有本文设计的自动增益控制方案的数据采集系统采集原信号并观察增益的变化情况,图4是模拟信号突变的情况,图5是模拟瞬态信号情况。增益的变化情况如图6和图7所示。结果表明,本方案能够根据信号的幅值及时调整增益,使得系统尽量以较大的增益采集信号以提高信噪比,同时在信号突变时能够不失真地采集信号,保证了后续信号分析与处理的有效性及可信度。
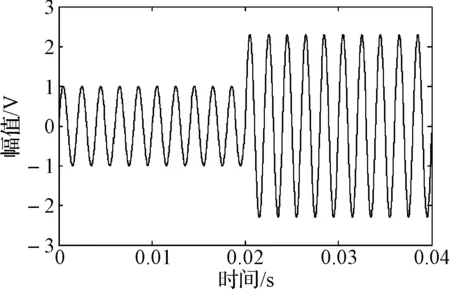
图4 幅值突变信号
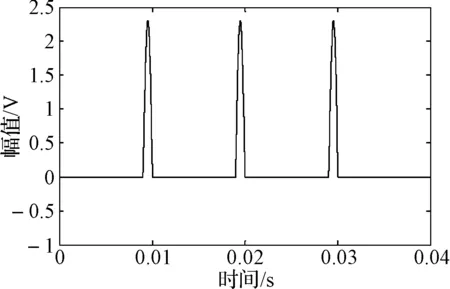
图5 冲击信号
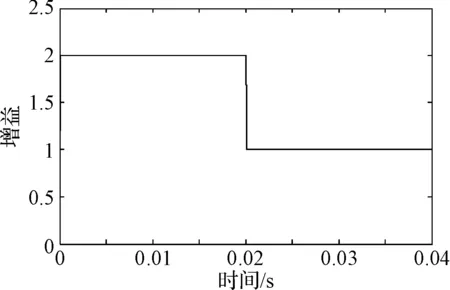
图6 幅值突变信号情况下增益变化
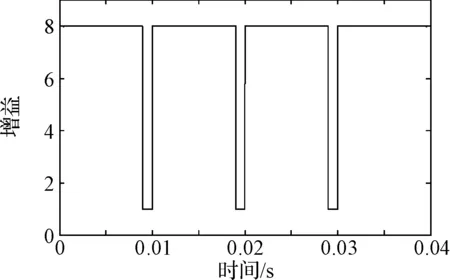
图7 冲击信号情况下增益变化
6结语
本文针对高精度信号采集需求的实际情况,提出了一种快速自动增益切换方案,结合模糊控制策略,很好地满足了要求。实验结果表明,本文提出的方案,能够快速适应信号幅值的变化,将信号幅值控制在合理的范围内,使得小信号信噪比高、大信号不削波失真,提高了检测结果的准确性和可靠性,从而证明了本方案是有效可行的。
参 考 文 献
[1] 周超.多带模拟信号的采样与重构[J].传感器与微系统,2011,30(5):83-85.
[2] 谢述理.一种基于PCI的测井模拟信号采集系统[J].石油仪器,2005,19(3):18-20.
[3] 姚从潮,王新民,黄誉,等.基于FPGA的高速模拟信号采集卡设计[J].计算机测量与控制,2011,19(10):2574-2577.
[4] 殷海俊,黄惠宁.舰船电子装备的状态监测与故障诊断[J].舰船电子工程,2015,35(1):144-147.
[5] 马晋,江志农,高金吉.基于瞬时转速波动率的内燃机故障诊断方法研究[J].振动与冲击,2012,31(13):119-124.
[6] 马波,魏强,徐春林,等.基于Hilbert变换的包络分析及其在滚动轴承故障诊断中的应用[J].北京化工大学学报,2004,31(6): 95-97.
[7] 崔小鹏,王公宝,王洁.一种故障诊断模糊专家系统的实现[J].舰船电子工程,2014,34(1):135-139.
[8] 王松林,谢顺依,王鼎.直流调速系统模糊复合控制的建模与仿真[J].舰船电子工程,2010,30(9):117-120.
[9] 赖于树,李迅波,熊燕,等.基于模糊群决策的智能仪器故障诊断专家系统[J].仪器仪表学报,2008,29(1):206-211.
[10] 荣健,乔文钊.基于模糊神经系统的多传感器数据融合算法[J].电子科技大学学报,2010,39(3):376-378.
[11] 高炳微,邵俊鹏,韩桂华.电液伺服系统位置和力模糊切换控制方法[J].电机与控制学报,2014,18(5):99-104.
[12] 梁霄,张均东,李巍,等.水下机器人T_S型模糊神经网络控制[J].电机与控制学报,2010,14(7):99-104.
收稿日期:2016年1月8日,修回日期:2016年2月22日
作者简介:王占友,男,博士后,工程师,研究方向:检测与控制。何琳,男,硕士,教授,博士生导师,研究方向:振动与噪声控制。崔立林,男,博士,助理研究员,研究方向:振动与噪声控制。陈景兵,男,硕士,助理研究员,研究方向:振动与噪声控制。
中图分类号TP273
DOI:10.3969/j.issn.1672-9730.2016.07.034
Design and Implementation of A Fast Automatic Gain Control Project
WANG ZhanyouHE LinCUI LilinCHEN Jingbing
(Institute of Noise & Vibration, National Key Laboratory on Ship Vibration &Noise, Naval University of Engineering , Wuhan430033)
AbstractAnalog signal acquisition and processing has been applied widely, but high signal acquisition precision is demanded in some special field. The signal amplitude is required to be controlled within reasonable limits, that is, small signal should be amplified to improve noise ratio and big signal should be reduced to avoid clipping distortion, thus the high noise ratio and signal integrity can be ensured. The fixed-gain signal acquisition system can’t meet the qualification. For this reason, this paper proposes a fast automatic gain control project, which adopts fuzzy control for its feature of applying to nonlinear and uncertain system, at the same time, the function of overrun detection is designed to ensure fast reaction for signal mutation, thus this project can change gain according to signal intensity, consequently, this problem is resolved effectively. The experimental results show that this project possesses good effect.
Key Wordsanalog signal acquisition, automatic gain, fuzzy control
