猎雷ROV定位精度试验方法研究*
2016-08-10李践飞
高 峰 李践飞
(1.91439部队96分队 大连 116041)(2.海军潜艇学院 青岛 266042)
猎雷ROV定位精度试验方法研究*
高峰1李践飞2
(1.91439部队96分队大连116041)(2.海军潜艇学院青岛266042)
摘要根据猎雷ROV组合导航系统工作原理,提出了以网络RTK GPS定位输出作为真值,与被试品定位输出进行比对的方法来验证猎雷ROV导航定位精度。在分析战术技术指标的基础上,提出了利用χ2检验法设计出试验样本量。结合作战使用,设计出接近实际使用条件的海上试验实施方案。最后给出了利用坐标转换进行误差解算和χ2假设检验的数据处理和结果评定方法。
关键词猎雷; 定位精度; 试验方法
Class NumberTJ61+7
1引言
猎雷(ROV Remotely-Operated Vehicle)是新型反水雷装备,由潜航体、综合控制系统、布放回收装置、灭雷战斗部、导航定位系统等组成。主要遂行对水雷的探测和定位,并引导舰船规避通过雷区,必要时携带灭雷炸弹和爆破割刀对水雷进行清除[1]。导航定位系统是猎雷ROV重要组成部分,装配于潜航体上,功能是确定潜航体相对工作母船的位置以及大地坐标位置。猎雷ROV定位精度试验的目的是在接近实战使用条件下考核导航定位系统定位精度是否达规定的指标要求。
关于惯性导航系统定位精度试验方面研究有:姚兴太研究了惯性导航系统定位精度与试验路径的关系[2],董忠臣对潜航体定位精度考核方法进行了探讨[3],李琳给出惯导系统最大定位误差的极值分析方法[4],李壮给出了基于短基线的ROV实时高精度定位方法[5],刁中凯给出了使用差分GPS检测火炮惯性导航定位精度的方法[6]。这些研究取得了许多成果,但这些研究只针对惯性导航定位精度试验某一环节,未从整体对定位试验进行研究。其次,对于猎雷ROV为平台的惯性导航定位精度试验缺乏针对性研究。
根据猎雷ROV惯性导航定位系统特点,立足于海上试验实施,从样本量设计、海上试验航路设计和试验保障方案等方面入手,给出了猎雷ROV定位精度试验方法。研究对于考核猎雷ROV作战使用性能,使装备尽快形成战斗力具有一定指导意义。
2猎雷ROV导航定位原理
猎雷ROV导航定位系统采用以捷联式惯性导航系统为主的组合导航系统。单一采用捷联式惯导系统,所提供的精度会随着时间而漂移。在长时间内,导航定位误差增长的速度主要由初始对准精度、系统所使用的惯性敏感器件缺陷和运载体运动轨迹的动态特性决定的[7]。虽然采用更高精度的敏感器件可以提高精度,但成本会大幅增加。猎雷ROV采用的是组合导航技术。运用外部导航信息来提高导航定位系统精度。
猎雷ROV组合导航系统以高精度激光捷联惯性导航系统为基础,组合多普勒计程仪和GPS接收机等外部辅助传感器信息,利用卡尔曼滤波算法进行误差估计,确保在动态环境下输出高精度导航信息和姿态信息。导航定位系统组成原理图见图1。这种组合导航系统提供两种具有互补特性的独立信息源:GPS提供时间短精度高的数据,以位置信息的形式给出,对导航位置进行修正;多普勒计程仪提供时间长稳定性高的数据,主要对潜航体速度进行修正。
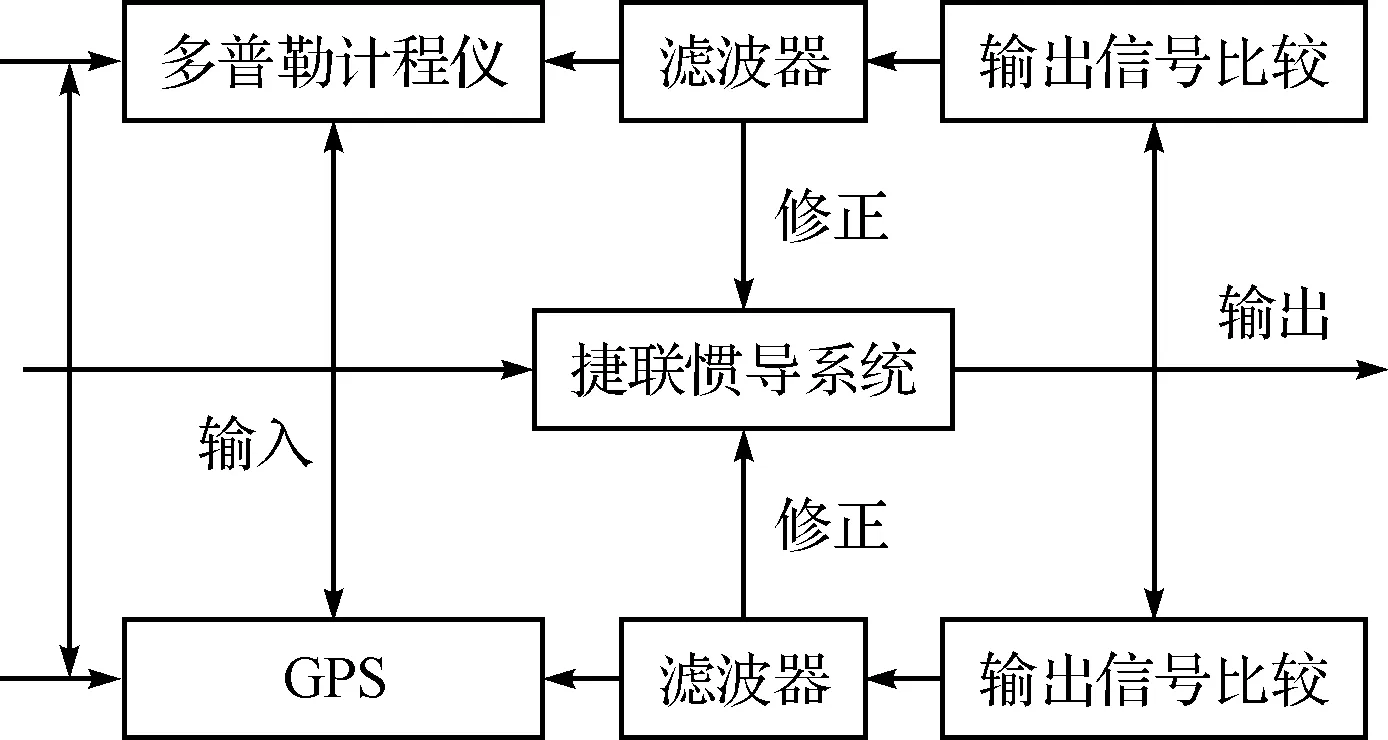
图1 组合导航系统组成原理图
3试验方法选择
对于以捷联惯导为主体的组合导航系统精度试验,以精度更高的惯导系统提供输出作为真值作为比对,是一种常用方法,但这种方法要求提供比对的系统至少比被试品精度高一个数量级。惯导系统精度提高一倍,成本会成倍增长。另外考虑到安装在潜航体也存在问题。综合考虑,这种方法在试验中实现起来存在困难。这里采用网络RTK GPS输出位置信息作为真值,比对组合导航系统输出,来进行猎雷ROV定位精度评定。
网络RTK GPS是一种集卫星大地测量技术、通信技术和计算机技术于一体空间信息实时服务技术。该技术利用CORS(Continuous Operational Reference System)建立连续观测网络,由于参考站坐标已知,即可精确地估计CORS间的空间相关误差,并建立网络范围内的空间相关误差区域模型,经此生成差分改正信息,并通过现代通信手段为用户提供实时高精度定位,网络RTK GPS水平定位精度可达1cm~3cm[8]。对比猎雷ROV组合导航系统定位精度,使用网络RTK GPS作为真值进行比对能够满足试验要求。
4试验航次数确定
组合导航系统的误差特性基本符合正态分布,航次越少,则与正态分布的差异越大。惯导系统试验周期长,试验的航次数应预控制。试验的航次设计,可依据子样标准偏差为χ2分布,建立置信度,置信区间和试验航次之间的关系为
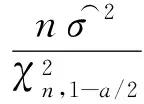

经查χ2分布表并计算得到航次数与置信区间关系如表1。
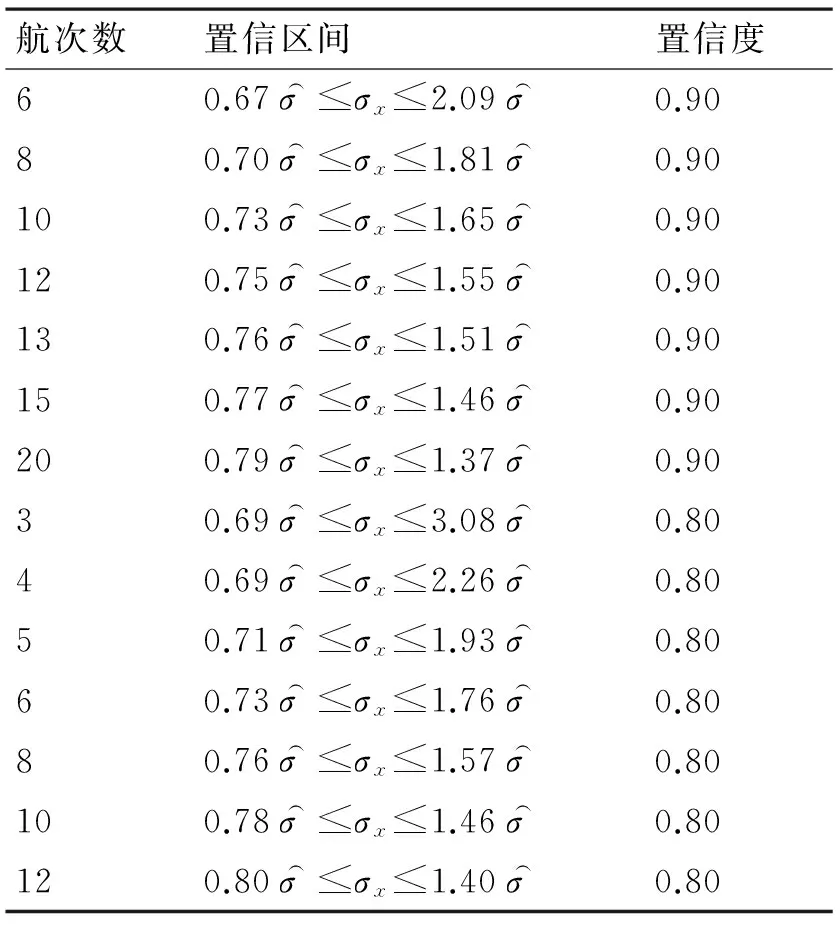
表1 试验航次与置信区间关系表
5海上实施方案
猎雷ROV定位精度试验海上实施方案的制定,主要依据定位指标要求和猎雷ROV作战使用。猎雷ROV海上作战使用时有两种工作模式,即母舰区域定位作业和前置作业。母舰区域工作方式中,母舰锚泊,猎雷ROV在母舰锚泊区域内对水雷进行探测定位,必要时采用灭雷方法清除水雷。在前置工作模式中,猎雷ROV在前方引导母舰规避水雷航行。猎雷ROV定位精度指标为航程Xkm时相对误差小于xm。在精度试验中,猎雷ROV工作模式应为前置工作方式,海上实施的主要过程有初始对准、综合校准、海上母船与猎雷ROV同步航行、GPS测量等过程。
5.1试验保障条件
试验海区的选取应结合猎雷ROV的实际使用需求和定位精度试验需求,试验海区可选底质平坦,最好为泥沙底或沙贝底,水深在Hm海域进行,海况满足使用要求。
需要的测控设备为声速梯度仪、水声定位系统、流速剖面仪。网络RTK GPS接收机。试验舰船保障为:试验母船一艘,能够提供潜航体工作所需动力。警戒艇一艘,主要是处理意外和警戒使用。
5.2组合惯导初始对准与综合校准
猎雷ROV组合惯导初始对准阶段主要完成条件输入初始条件,调整平台到预定的坐标系,对陀进行陀螺进行测漂[10]。在试验时,将潜航体布放入水,在水面漂浮Xmin,完成组合惯导的初始对准。
综合校准,在导航工作中利用外部基准信息对惯导进行校准的过程。由于潜航体在水中机动,而捷联式惯导又直接安装在潜航体上,没有物理平台隔离,受环境影响大。导航过程中采用人工操控潜航体与母船水面同步航行模式,沿直线往返航行完成潜航体惯导综合校准。惯导综合校准航路图见图2。
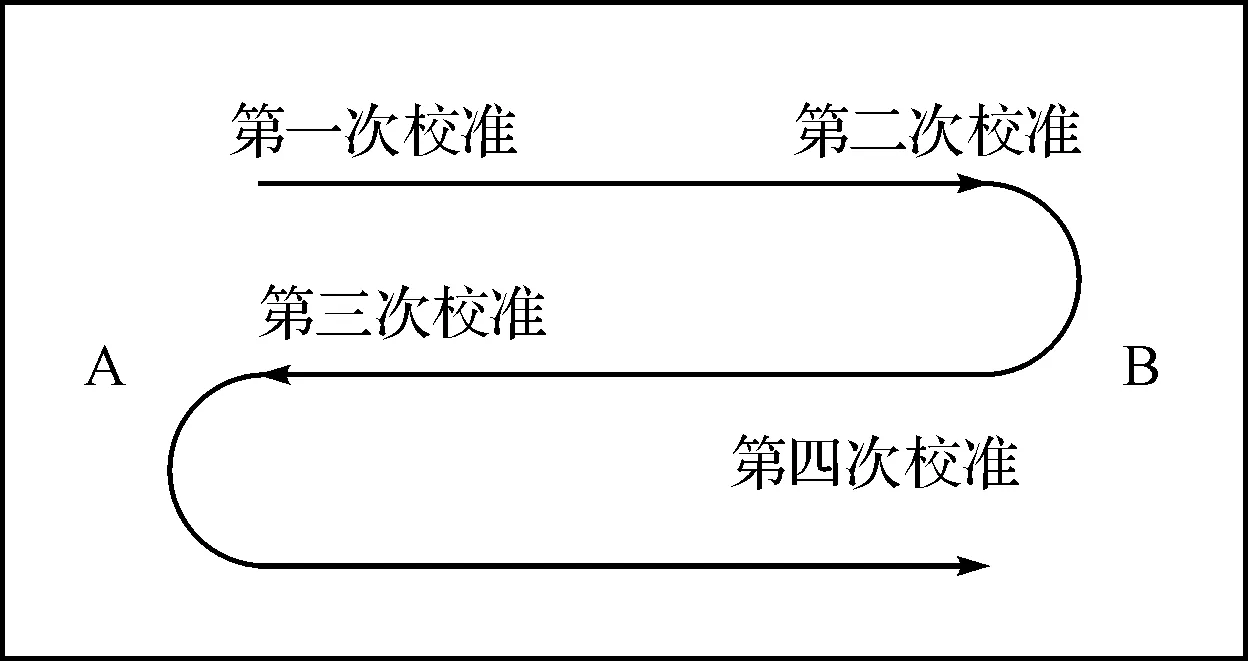
图2 组合惯导综合校准试验航路图
母船在A点布放潜航体,下达导航系统标定指令到潜航体,潜航体在水面漂浮15min,完成第一次校准。人工操控潜航体沿航线向B点方向以一定速度与母船进行水面同步航行,航程略大于Xkm后,开始第二次校准。校准完毕后调头向A点方向航行略大于Xkm,开始第三次校准。校准完毕后调头向B点方向航行略大于Xkm,进行第四次校准。第四次校准后完成综合校准试验。
5.3母船与猎雷ROV同步航行
在试验海区设定起始点,规划试验航路。潜航体采用人工操控模式,母船保持与潜航体后方100m~200m、横距5 m~30m进行同步航行,航速由慢到快逐步上升,同时在综合显控台监控母船和猎雷ROV航行态势。航程结束后,读取惯导和GPS输出位置信息。
6数据处理方法
在猎雷ROV定位精度试验中,主要的数据处理及结果评定过程是:通过坐标转换,来求解每航次定位误差,然后在异常值检验的基础上,得用χ2假设检验进行试验结果评定。
6.1定位误差解算
1) 将潜航体惯导输出坐标和实际测得GPS坐标从大地坐标系转换至地球空间直角坐标系
在大地标系中,任意地面点P的坐标为(B,L,H)。该坐标系的定义是:地球椭球的中心与地球的质心重合,椭球短轴与地球自转轴重合,大地纬度B为过地面步的椭球法线与椭球赤道面的夹角,大地经度L为过地面步的椭球子午面与格林尼治平子午面之间的夹角,大地高H为地面点沿椭球法线至椭球面的距离[11]。
在地球空间直角坐标中,任意地面点P的坐标为(X,Y,Z),该坐标系的定义是:以地球质心为坐标原点O,其Z轴指向地球北极,X轴指向格林尼治平子午面与地球赤道的交点E,Y轴垂直于XOZ平面并构成右手坐标系。
大地坐标系至空间直角坐标系的转换公式为

2) 求定位误差在站心坐标系下的坐标(xi,yi,zi)
为解算方便,常取测点为原点建立坐标系,这种坐标系称为站心坐标系。站心坐标定义如下:以测点的法线方向为Z轴,大地平行圈(东方向)与大地地平面的交线为Y轴,构成左手坐标系。空间直
则在站心地平直角坐标系下,求潜航体定位误差为di。

6.2定位误差的假设检验χ2检验法[12]
设di是来自试验的样本,要求的假设检验(显著性水平为α):
H0:σ2=σ02=182H1:σ2>182
7结语
定位精度是猎雷ROV重要指标,对作战效能起决定因素。定位精度试验方法研究,对于完成该试验项目考核,从而为系统设计定型试验,指导部队训练和作战使用,使猎雷ROV快速形成战斗力具有重要意义。
参 考 文 献
[1] 刘成胜,符敏.反水雷UUV发展技术[J].水雷战与舰船防,2014,22(2):69-72.
[2] 姚兴太.惯性导航系统定位精度与试验路径的关系[J].火炮发射与控制学报,2007(4):27-30.
[3] 董忠臣.潜航体定位精度考核方法探讨[C]//反水雷兵器技术与装备发展研讨会论文集,北京:兵器工业出版社,2012:242-244.
[4] 李琳,丁春蕾,白伟.惯导系统最大定误差的极值分析[J].天津航海,2005(4):45-47.
[5] 李壮,乔钢,孙宗鑫.基于短基线的ROV实时高精度定位系统[J].高技术通讯,2013,23(12):1230-1235.
[6] 刁中凯,周开志,孙宝岩.基于差分GPS检测火炮惯性导航定位精度[J].四川兵工学报,2009,30(12):1230-1235.
[7] 张天光,王秀萍.捷联式惯性导航技术[M].北京:国防工业出版社,2010:263-264.
[8] 黄丁发,熊永良.GPS卫星导航定位技术与方法[M].北京:科学出版社,2009:201-203.
[9] 郑梓祯,刘德耀.船用惯性导航系统海上试验[M].北京:国防工业出版社,2006:105-106.
[10] 朱家海.惯性导航[M].北京:国防工业出版社,2008:174-175.
[11] 李明峰,冯宝红,刘三枝.GPS定位技术及其应用[M].北京:国防工业出版社,2007:23-28.
[12] 盛骤,谢式千,潘承毅.概率论与数理统计[M].北京:高等教育出版社,1989:202-204.
收稿日期:2016年1月9日,修回日期:2016年2月29日
作者简介:高峰,男,工程师,研究方向:试验技术。
中图分类号TJ61+7
DOI:10.3969/j.issn.1672-9730.2016.07.015
Mine-hunting ROV Location Precision Test Method
GAO Feng1LI Jianfei2
(1. Unit 96, No.91439 Troops of PLA, Dalian116041)(2.Navy Submarine Academy, Qingdao266042)
AbstractAccording to the operational theory of ROV integrated navigation system, a network positioning output as the true value is proposed, the tested product is compared to verify navigation and positioning accuracy. In the analysis of tactical and technical indicators, χ2 test method is given to design sample size, And according to operational use, offshore experiment implementation is designed. Finally, the coordinates conversion method is given for error solve, and the χ2 hypothesis testing is given for data processing and evaluation of results.
Key Wordsmine-hunting, location precision, test method