基于GSL科学计算库的主动定向浮标信号处理算法实现*
2016-08-10杨绪峰凌震莹
杨绪峰 乔 斌 凌震莹 张 雷
(中国船舶重工集团公司第七一五研究所 杭州 310023)
基于GSL科学计算库的主动定向浮标信号处理算法实现*
杨绪峰乔斌凌震莹张雷
(中国船舶重工集团公司第七一五研究所杭州310023)
摘要利用GSL开源科学计算库的强大计算功能,实现了主动定向浮标信号处理的编码。采用互谱法求CW回波信号目标方位,依据目标多普勒频移来测速。并做了距离方位可视化显示,使得目标方位显示直观明了。
关键词GSL科学计算库; 声纳浮标; 矢量水听器; 互谱法
Class NumberTN219
1引言
浮标系统[1~3]按照作用功能,分为温深浮标、海洋环境噪声浮标、全向浮标[4]、定向浮标[5];按照工作方式,分为被动浮标[6]和主动浮标。其中,主动全向浮标的换能器只能得到质点声压信息,一枚主动全向浮标只能确定一个目标距离圆和一个径向速度,单枚浮标不具备测向功能。主动定向浮标采用矢量水听器,单枚浮标不仅能精确测定目标距离和径向速度,还实现了目标方位测量,提高了单枚浮标的使用效率。
2原理
2.1主动定向浮标[7]信号处理
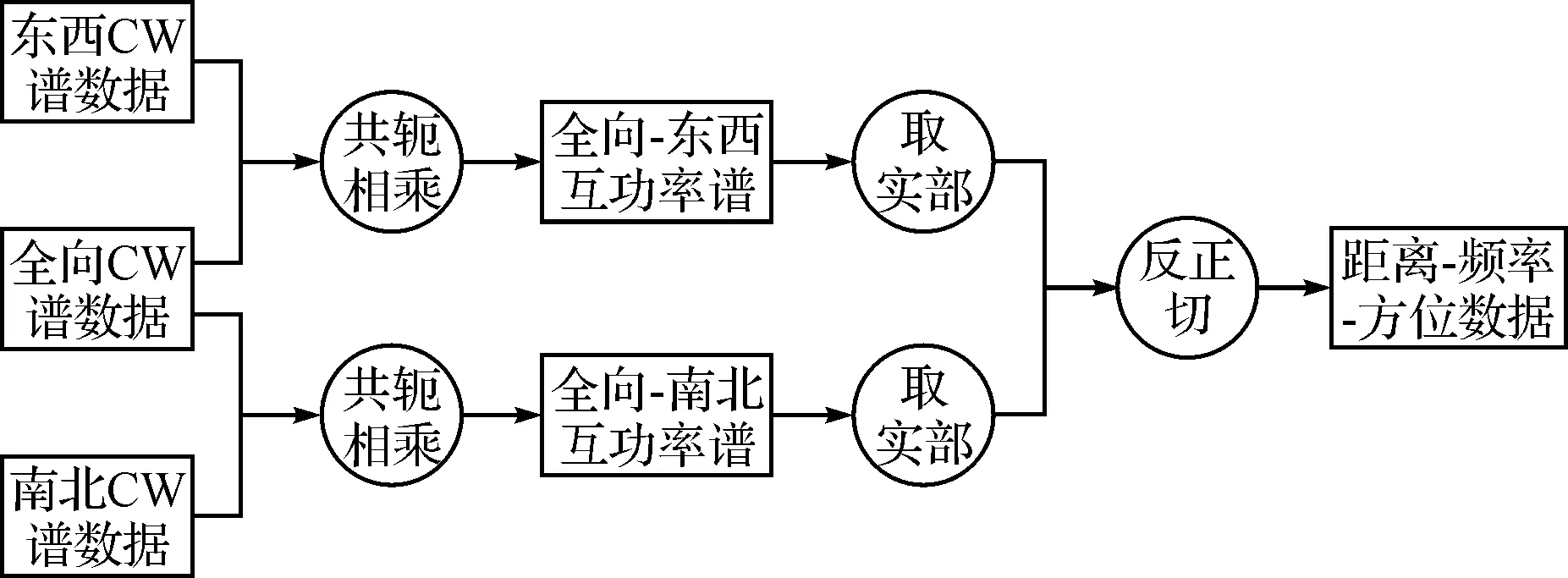
主动定向浮标采用矢量水听器,不仅能得到声压信息,还能测量质点振速信息,这使得单枚主动定向浮标便具备测向功能。采用互谱法进行方位计算,能抵抗各向同性噪声干扰。互谱法由东西、南北互相垂直方向的互功率谱经过反正切计算得到,而目标速度信息则依靠目标多普勒频移来计算。
2.2距离-方位可视化原理
互谱法求得的是距离-频率维下的振幅-方位值,直接用来显示不能直观明了地观测到目标方位。有必要转化为距离-方位维下的振幅值可视化显示。
如图1所示,首先建立距离-角度(R-θ)坐标系下的振幅(A)三维空间, 对距离-方位空间(R-B)上的每一点(ri,bk)∈[R,B],取最大振幅:
A(ri,bk)=max{Aj1(ri,bk,fj1),…,Aj2(ri,bk,fjN)}
(12)
A(ri,bk)映射到距离-角度(R,θ)空间
(13)
得到了距离-角度(R,θ)空间的振幅值A(ri,θk)显示结果。
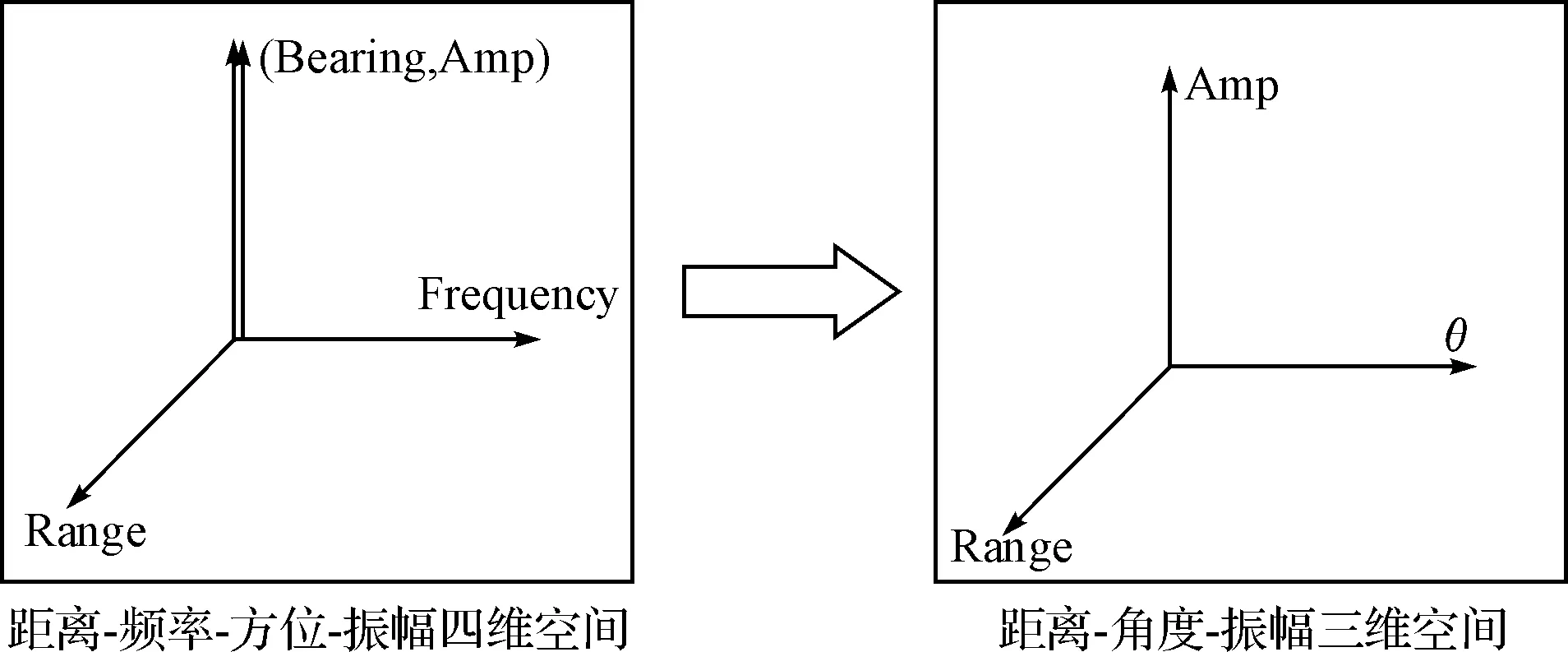
图1 (R-F-B-A)四维空间到(R-θ-A)三维空间的变换
2.3GSL开源科学计算库介绍
GNU科学计算库(GNU Scientific Library)[8]是一个跨平台的科学计算库。它以C语言为底层开发语言,开发出向量、矩阵运算、数值计算、傅里叶分析、小波分析、统计分析等科学计算库,并封装成API接口,方便编程人员直接调用并做进一步的高层次开发。GSL开源库节省了编程人员从最底层编写科学计算代码的过程,提高了编程效率。由于GSL科学计算库是一个开源计算库,可以方便编程人员直接使用,扩大了编程用户群体。
3算法设计与软件实现
3.1三路信号预处理
经矢量水听器接收的全向信号是由矢量水听器的声压信息得到,两路正交的东西、南北信号由质点振速信息得到。假设目标方位为θ,全向、东西、南北三路CW时域信号分别为XOm、XEW和XNS,则三路信号有如下关系:

图2 信号预处理流程
(1)
(2)
经矢量水听器接收的全向、东西、南北三路CW时域信号,都要做预处理。首先经过复解调将信号的中心频率搬移到零频;然后对时域信号做FFT得到信号的频谱;经过谱线选择,得到了全向、东西、南北三路CW信号的谱数据。
全向、东西、南北三路CW时域信号经FFT变换为频谱数据的公式为
(3)
=YOm(k)·sin(θ)
(4)
=YOm(k)·cos(θ)
(5)
经过3.1节的预处理,得到三路信号的频谱,对全向频谱数据进行求模运算,便得到距离-频率维下的振幅值。公式为
YABS=abs|YOm(k)|
(6)
CW信号预处理程序代码如下:
// inData输入时域数据
//index numPerbich输入数据批次与点数
//nfft ndft fft与dft点数
//sel_out selnum谱线选择输出结果与点数
_LOCAL_ void CWPreProc(double *inData, int index, gsl_complex *sel_out, int numPerbich, int ndft, int nfft, int selnum)
{
int i;
//复解调
// cwppReal复解调输出实部
// cwppImag复解调输出虚部
//FC FS 信号中心频率与采样率
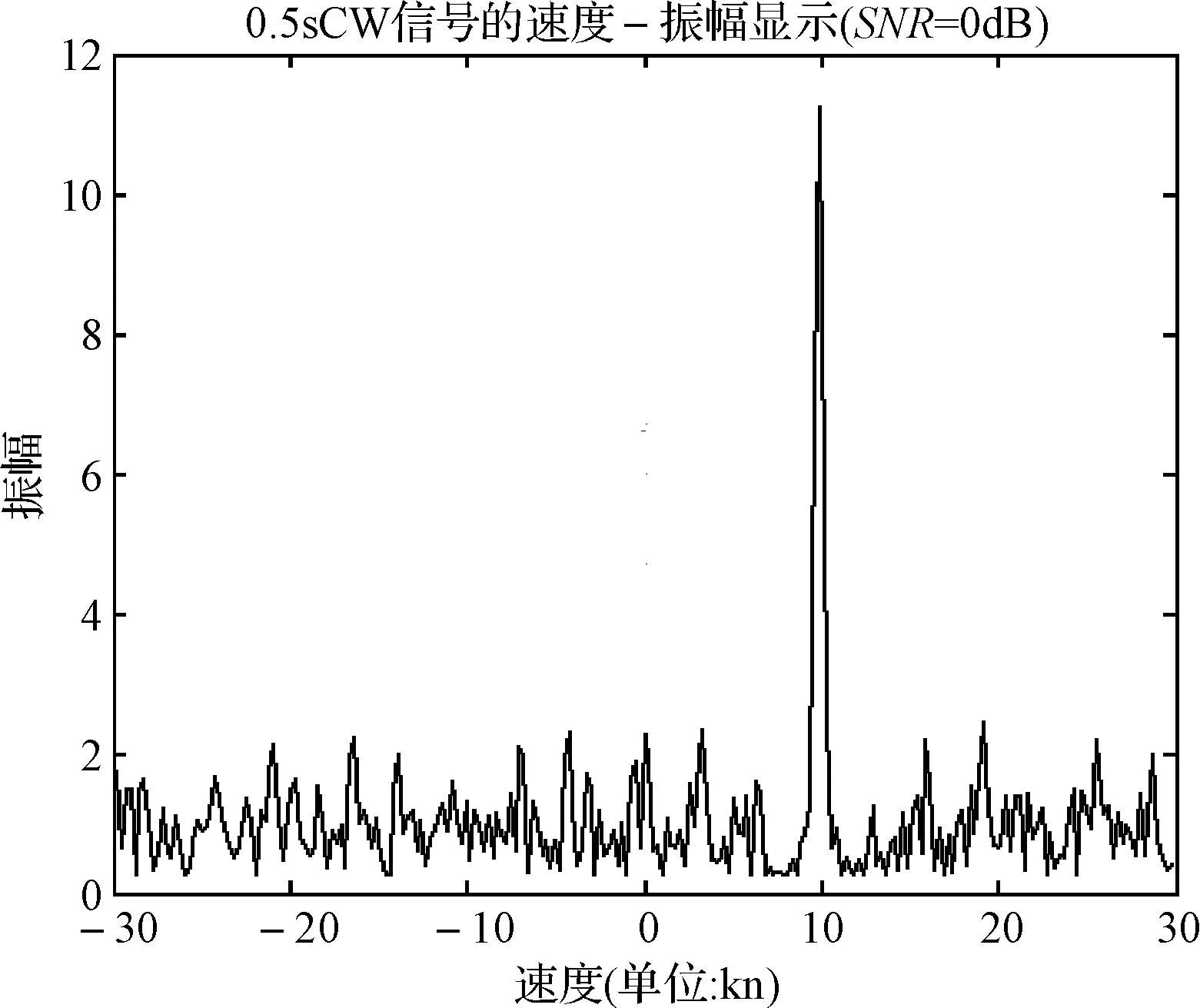
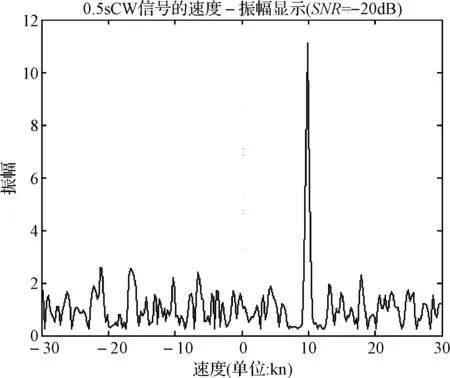
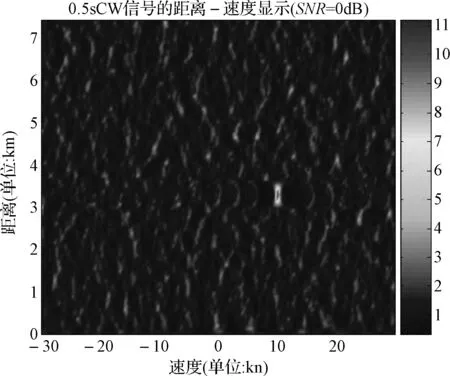
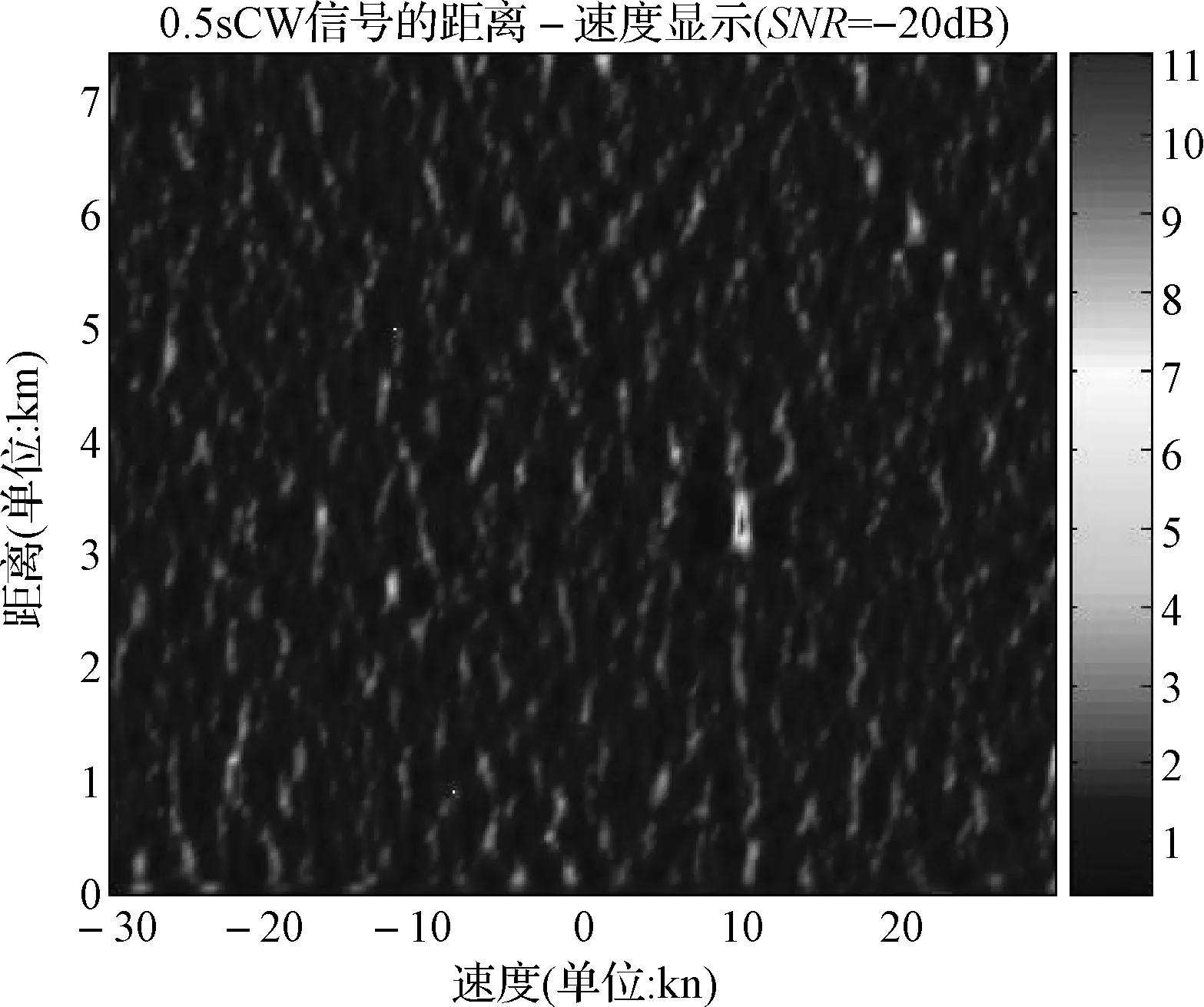
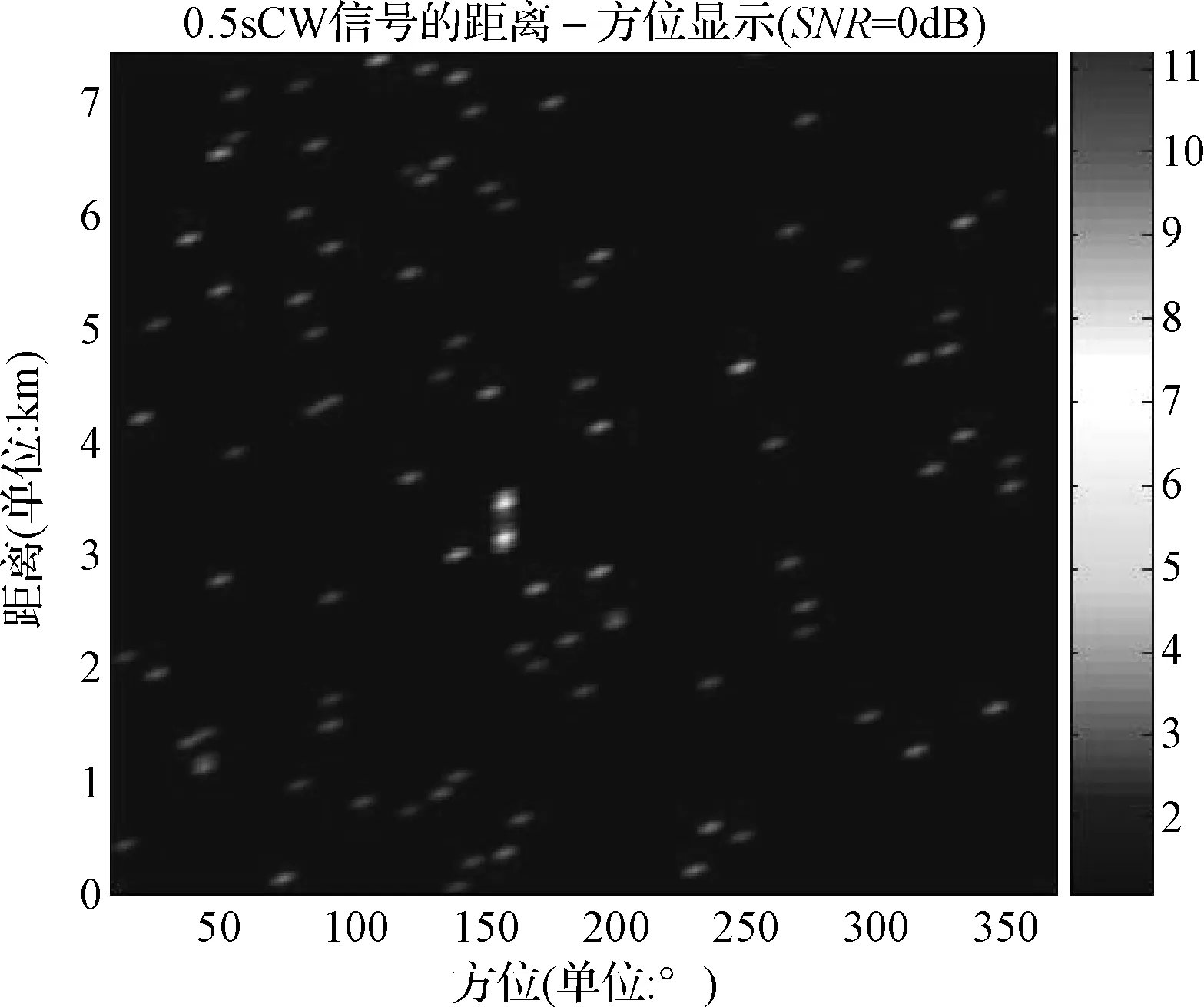
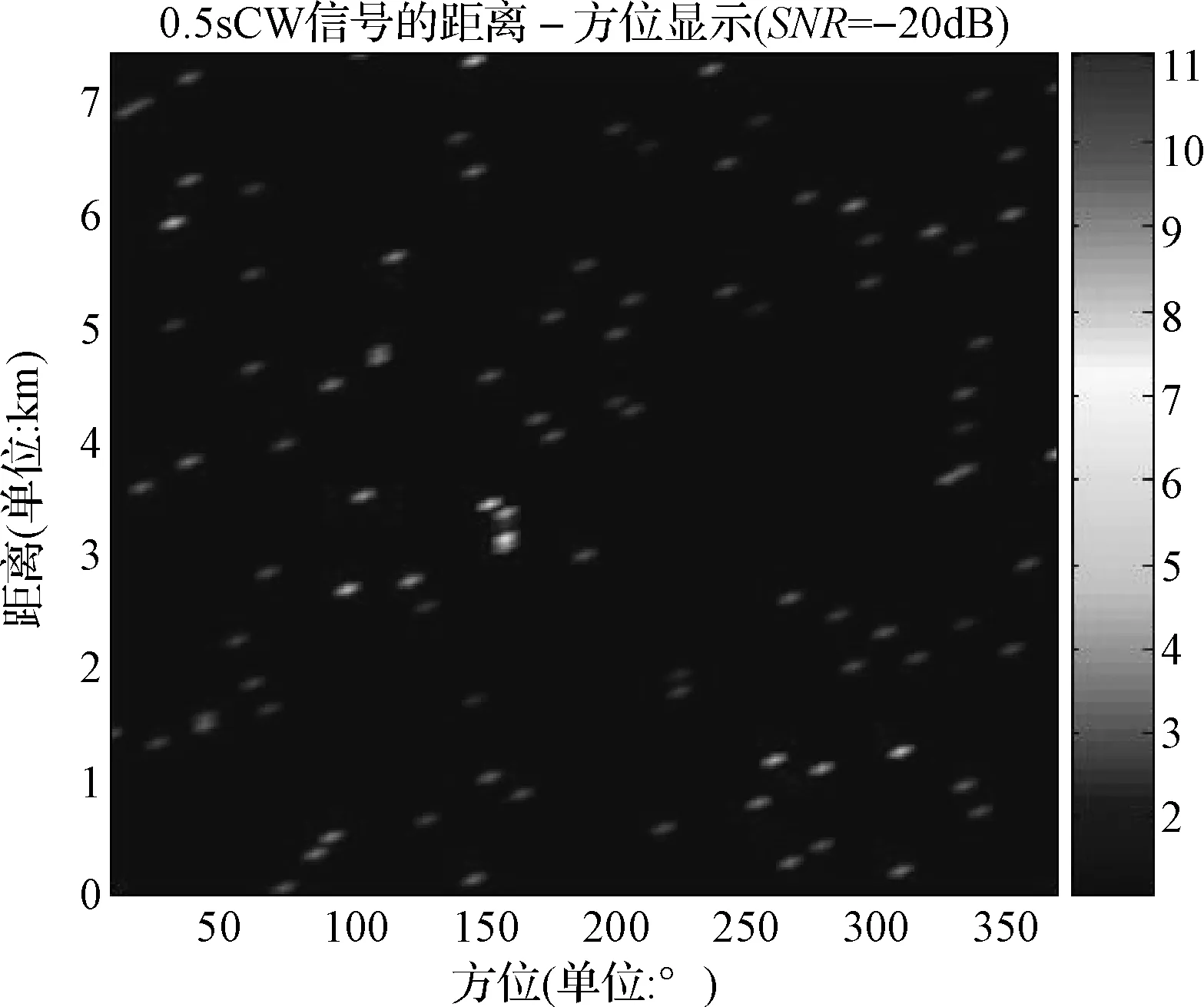
for(i=0;i { cwppReal[i] = *(inData+i) *cos(2*pi*(index*numPerbich+i)*FC/FS); cwppImag[i] = *(inData+i) *sin(2*pi*(index*numPerbich+i)*FC/FS); } //重叠FFT //DFT旧矩阵右移 // cwppDFT_real cwppDFT_ imag DFT数据实虚部 GslVectorCpy(cwppDFT_real, 1, cwppDFT_real+numPerbich, 1, ndft-numPerbich, 1); GslVectorCpy(cwppDFT_imag, 1, cwppDFT_imag+numPerbich, 1, ndft-numPerbich, 1); //左边添加新进复解调点 GslVectorCpy(cwppReal, 1, cwppDFT_real, 1, numPerbich, 1); GslVectorCpy(cwppImag, 1, cwppDFT_imag, 1, numPerbich, 1); //实数向量化复数向量 //cwppDFT_compx DFT复数数据 GslVectorRect(cwppDFT_real, cwppDFT_imag, &cwppDFT_compx[0], nfft); //FFT GslVectorFFT((double *)cwppDFT_compx,cwppFFT_out,nfft); //谱线选择 GslVectorCpy(cwppFFT_out+nfft-1-selnum, 1, sel_out,1, selnum, 1);//谱线选择前半部分 GslVectorCpy(cwppFFT_out, 1,sel_out +selnum,1, selnum, 1);//谱线选择后半部分 } 3.2互谱法计算目标方位并显示 利用互谱法[9~10]计算目标方位的流程图如图3所示,东西、南北CW谱数据分别与全向谱数据共轭相乘,得到全向-东西互功率谱和全向-南北互功率谱,公式为 图3 互谱法测向流程图 IOm_EW(k)=YOm(k)YEW(k)* =YOm(k)YOm(k)*·sin(θ) (7) IOm_NS(k)=YOm(k)YNS(k)* =YOm(k)YOm(k)*·cos(θ) (8) (9) 4实验仿真 仿真实验中,设定目标距离为3km,目标方位为150°,速度为10节。在0dB、-20dB不同信噪比下,0.5s脉宽下的CW信号距离-速度、距离-方位探测结果见图4~图9。 4.1速度-振幅显示 图4 速度-振幅显示(SNR=0dB) 图5 速度-振幅显示(SNR=-20dB) 4.2距离-速度显示 图6 距离-速度显示(SNR=0dB) 图7 距离-速度显示(SNR=-20dB) 4.3距离-方位显示 图8 距离-方位显示(SNR=0dB) 图9 距离-方位显示(SNR=-20dB) 5结语 本文基于GSL科学计算库进行主动定向浮标信号处理的软件编码。利用GSL科学计算库中提供了大量的科学计算API接口,使得软件编码变得简捷高效。同时,给出了距离-方位可视化显示,使得图形界面显示更加直观。 参 考 文 献 [1] 潘勤升.声呐浮标最新进展[J].声学与电子工程,1991(24):45-48. [2] 尹晓东,刘清宇,徐江.国外航空声学探潜装备研究进展[J].声舰船科学技术,2008(30):175-172. [3] 凌国民,王泽民.声呐浮标技术及其发展方向[J].声学与电子工程,2007(87):1-5. [4] 潘勤升.主动全向声呐浮标系统简介[J].声学与电子工程,1994(33):41-39. [5] 潘勤升.被动定向声呐浮标系统[J].声学技术,1992(Z1):76-78. [6] 潘勤升.被动声纳系统在多干扰源场景下的探测性能分析[J].舰船电子工程,2016(36):133-138. [7] 潘勤升.主动定向的声呐浮标及系统[J].声学与电子工程,1988(1):28-30. [8] Mark Galassi, Jim Davies,etal. GNU Scientific Library Reference Manual,2010(3):1-504. [9] 陈涛,韩强强,刘鲁涛等.改进的基于互谱的宽带信号测向算法[J].系统工程与电子技术,2014(36):879-883. [10] 刘伯胜,田宝晶.矢量传感器估计目标方位的误差的仿真研究[J].哈尔滨工程大学学报,2003(24):491-494. 收稿日期:2016年1月7日,修回日期:2016年2月22日 作者简介:杨绪峰,男,硕士,助理工程师,研究方向:水声信号处理与编码。乔斌,男,硕士,高级工程师,研究方向:水声信号处理与编码。凌震莹,女,硕士,高级工程师,研究方向:软件编码与软件体系。张雷,男,硕士,高级工程师,研究方向:显示控制与编码。 中图分类号TN219 DOI:10.3969/j.issn.1672-9730.2016.07.011 Realization of Directional Sonobuoy Signal Process Algorithm Based on GNU Scientific Library YANG XufengQIAO BinLING ZhengyingZHANG Lei (No.715 Research Institute of CSIC, Hangzhou310023) AbstractUsing the strong computing ability of GSL, coding Directional Sonobuoy signal process is realized. In our algorithm, target bearing of CW signal is calculated by cross spectrum method and target speed is calculated by Doppler frequency shift. In order to make target display intuitire and clear, range to bearing display visualization is done in this paper. Key WordsGNU scientific library, sonobuoy, vector hydrophone, cross spectrum method