仿生蛇形机器人结构研究与设计*
2016-08-08徐志佳
张 琢,徐志佳,王 俊
仿生蛇形机器人结构研究与设计*
张 琢1,徐志佳1,王 俊2
(1.贵阳学院机械工程学院,贵州贵阳,550005;
2.中航工业贵州贵航汽车零部件股份有限公司华阳电气公司,贵州贵阳,550006)
摘 要:蛇形机器人各种单元连接结构中,单关节内万向节连接形式具有单元少、结构协调性好等优点。从生物蛇身体结构出发,结合蛇形机器人工作环境,设计一种单关节内万向节连接形式的仿生蛇形机器人结构。对常用万向节结构所用十字轴的分体设计,简化了机器人的结构形式,机器人单元长度为91 mm,单元直径为80 mm,机器人零件数量为521件。
关键词:仿生机器人;蛇形机器人;结构设计
1 引言
生物蛇的运动主要是由脊椎骨(构成脊柱)、肋骨(结构周向支撑)、腹鳞(提供摩擦)和与之有关的肌肉(提供动力)共同组成。其脊柱(生物蛇运动和身体支撑等主要由脊柱完成,图1)由100~400个脊椎骨(图2)组成,每对脊椎骨之间均形成转动副(万向节),单个运动副能够进行水平10°~20°、垂直2°~3°范围的转动,但由于数量的优势,使得生物蛇可以进行大幅度的弯曲,也使得其各种运动形式均能协调地进行。[1-3]
生物蛇身体构造是经过自然法则的竞争、选取、发展而来,极具合理性,若用机械结构完全模拟其结构几乎不可能,然而机械结构是机器人动作的必备条件,设计出合理的机器人结构十分重要。

图1 生物蛇脊柱Fig.1 Biological snane spine
2 蛇形机器人常用结构
2.1 单元连接结构
Hirose教授经过试验研究总结出来蜿蜒(Ser-penoid)曲线后,产生了多种满足该曲线的仿生蛇形机器人结构,常用形式主要有以下几类。
(1)关节间平行方式连接
机器人两关节之间只能够绕相互平行的轴旋转(图3),ACMⅢ[4-9]等较早的蛇形机器人便属于此种结构,该结构简单可靠,功能单一。
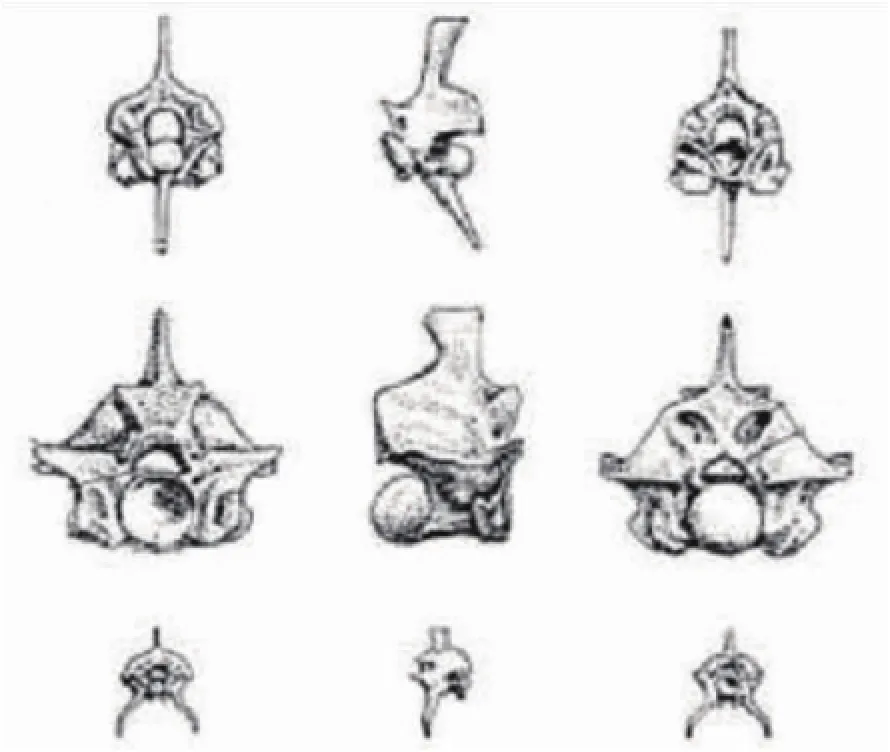
图2 生物蛇脊椎骨Fig.2 Biological snake Verterae

图3 关节间平行方式连接简图Fig.3 The diagram of joints and parallel
(2)相邻关节间正交连接
机器人在单关节连接处仅能够绕单轴旋转,但相邻两关节之间的旋转轴是正交[10]的(图4),机器人可以通过多个关节实现生物蛇脊柱的万向节结构。该结构能实现空间翻转[11]等三维运动。此结构相对第一种结构形式要复杂,比第一种结构形式接近生物蛇结构。

图 4 相邻关节间正交连接简图Fig.4 The diagram of orthogonal joints and adjucent connecfion
(3)单关节内万向节连接
机器人两单元之间连接为万向节结构(图5),ACM R5、GMD Snakes2[12]等便属于该结构形式,此结构相对前两种结构更接近生物蛇,但比较复杂,这也是目前普遍使用的一种单元连接形式。
2.2 辅助结构
除采用常用连接方式连接外,还有根据功能和工作环境的特殊要求,用绳索辅助连接[13]等方式进行辅助连接,对机器人进行防水防尘密封设计。为使机器人运动的实现,多数蛇形机器人还加上从动轮或运用棘轮机构,如ACM R5、GMD Snake2、AmphiBot II[14]。
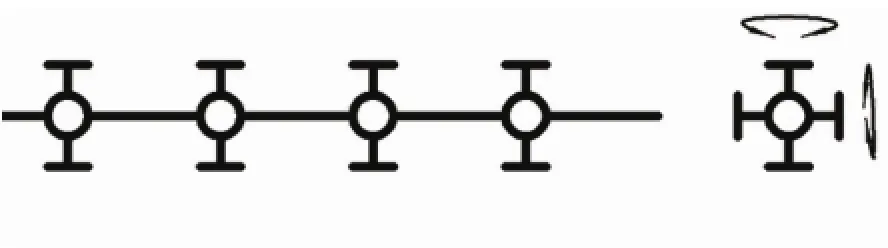
图 5 单关节内万向节连接Fig.5 Vnicersal joinfs intraarticular
3 蛇形机器人结构设计
3.1 作业环境分析及功能要求
蛇形机器人主要在安全性不高的坍塌建筑物、污染严重的下水道等环境作业,要求机器人具有协调的运动步态、良好的密封性、耐高低温等特性。要更接近生物蛇的运动,具有抬头、蜿蜒、蠕动、侧向、翻滚等运动步态,在遇障碍物时能翻越障碍物或规避障碍。
3.2 对生物蛇结构的抽象处理
生物蛇两脊椎骨之间的万向节结构转动范围有限,但数量占有绝对优势,能够完成多种运动步态,在各种环境能运动自如。机械结构数量上不具优势,不能对生物蛇完全模拟,故在结构设计时需要机器人两单元之间转动范围尽量大,以满足蛇形机器人的功能要求。
众多万向节[15]结构中,十字轴形式万向节最为常见,也非常简便,若直接选择一种十字轴进行单元连接,会缩小机器人万向节转动角度。本次设计选用两轴叠加形式十字轴(如图6所示),来完成机器人单元连接,不仅保证机器人的万向节结构,还可增大万向节的转动角度。

图6 十字轴Fig.6 Cross shaft
3.3 机器人结构的设计
蛇形机器人结构设计总要求,是在保证整机性能基础上,尽量使结构精、简、小。
3.3.1 基本参数确定
基于蛇形机器人的相关要求,对蛇形机器人设计相关参数进行合理选择。
(1)材料选择。蛇形机器人结构部分设计时,不仅要结构满足刚强度、耐腐蚀等要求,还要使其质量尽量小,减小机器人运行过程中动力源在负担,选择合适的材料就异常关键。为保证材料采购成本,除密封材料外,将支撑结构材料统一。
从力学性能、物理性能、价格几方面综合考虑,对45号碳钢、304不锈钢、TC4钛合金、7A09硬质铝合金几种常用材料分析对比,选用性价比高的7A09硬质铝合金作为机器人结构件材料,其基本性能参数为:抗拉强度σb=530 MPa,屈服强度σs:=400 MPa,密度ρ:2.85 g/cm3,断后伸长率A:6%。
(2)动力源。舵机参数对机器人结构设计有决定性影响,舵机尺寸参数决定着机器人尺寸和质量大小,舵机驱动扭矩的大小和运动速度,又是决定机器人结构复杂程度的关键因素。所以蛇形机器人用舵机需要满足质量小、速度快、输出扭矩大、占用空间小等要求。在众多机器人舵机中,舵机DS-238 MG质量小、占用空间小,而输出扭矩较大,适用于小型蛇形机器人的动力源,其参数如下:
基本尺寸为29×13×30 mm,质量为22 g;工作电压为4.8 V~6.0 V;扭矩为4 kg.cm~4.6 kg.cm;速度为0.15 s/60°(4.8 V)。
(3)能量源。为使机器人在运行过程中,机器人有足够能量来源,在机器人每一个单元上配一12V锂离子电池,与控制板一起放置于单元连接支架上,给两侧舵机供电。
3.3.2 结构设计
(1)舵机布局
为实现蛇形机器人万向节结构的要求,将舵机输出轴以相互垂直的形式摆放,机器人结构形式则变得简单可靠。由舵机外形尺寸、电池尺寸、控制板电路共同决定单元内两舵机距离,同时决定了机器人直径大小。
舵机布局形式如图7所示,舵机一侧面与单元连接支架贴合,通过挡块定位,使得机器人在运行过程中舵机稳定。为保证机器人运行过程中机器人单元内部无干涉,同时兼顾机器人单元不至于过长,将舵机输出轴距离定为31.8 mm。
(2)连接支架设计
该零件为装配母件,用于能量源和驱动电路的摆放、机器人整体的支撑,同时舵机、连接板等零部件也安装于该零件上。根据控制板和电源形状及尺寸,为保证电源与控制板的安装及机器人单元尺寸的控制,结合舵机尺寸、控制电路及电源形状大小,设计连接支架形状及尺寸如图8所示。

图7舵机布局摆放示意Fig.7 The layout display of servo schematic
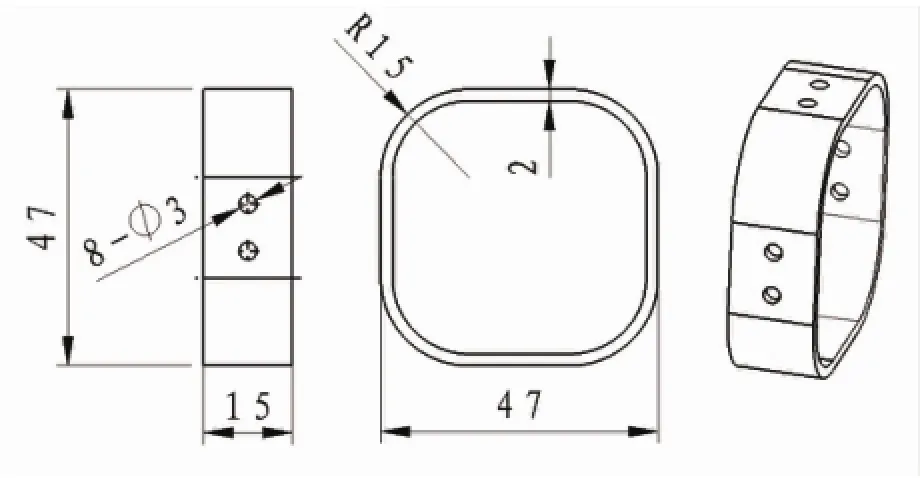
图8 连接支架示意图Fig.8 Bracket connection schematic
(3)齿轮设计
由于舵机输出轴在舵机中心位置,需要将其动力传递到下一单元关节。在各种传动方式中,齿轮对动力的传动能够节省空间,并且传动效率高(达到98%),故在设计中选用齿轮来对动力进行传递。
根据舵机尺寸,结合相关受力及空间条件,考虑齿轮制作等方面因素,选择齿轮参数为:齿数z =25、模数m=1、压力角α=20°、齿顶高系数为1、顶隙系数为0.25,两齿轮的中心距确定为25 mm,保证了齿轮加工的便利性和传递可行性。
与舵机连接的齿轮中心为与舵机输出轴配对的花键孔,与传动轴配对的齿轮中心为螺纹孔。齿轮与舵机输出轴、传动轴的连接还需要通过紧固螺钉胶进行紧固连接,以保证机器人运行的稳定性。齿轮等相关零部件的安装连接如图9所示。
(4)连接板设计
根据功能需求,要将各个单元连接起来,同时需对舵机、传动轴等进行定位,再结合连接支架、齿轮、舵机及控制板等形状尺寸,设计出如图10中a所示的连接板。连接板对舵机、传动轴进行支撑与固定,同时将两不同单元连接起来。连接板安装在连接支架上,先用两颗螺钉进行预定位,然后通过点焊形式固定,如图10中b所示。

图9 齿轮布置图Fig.9 The layoat of gear
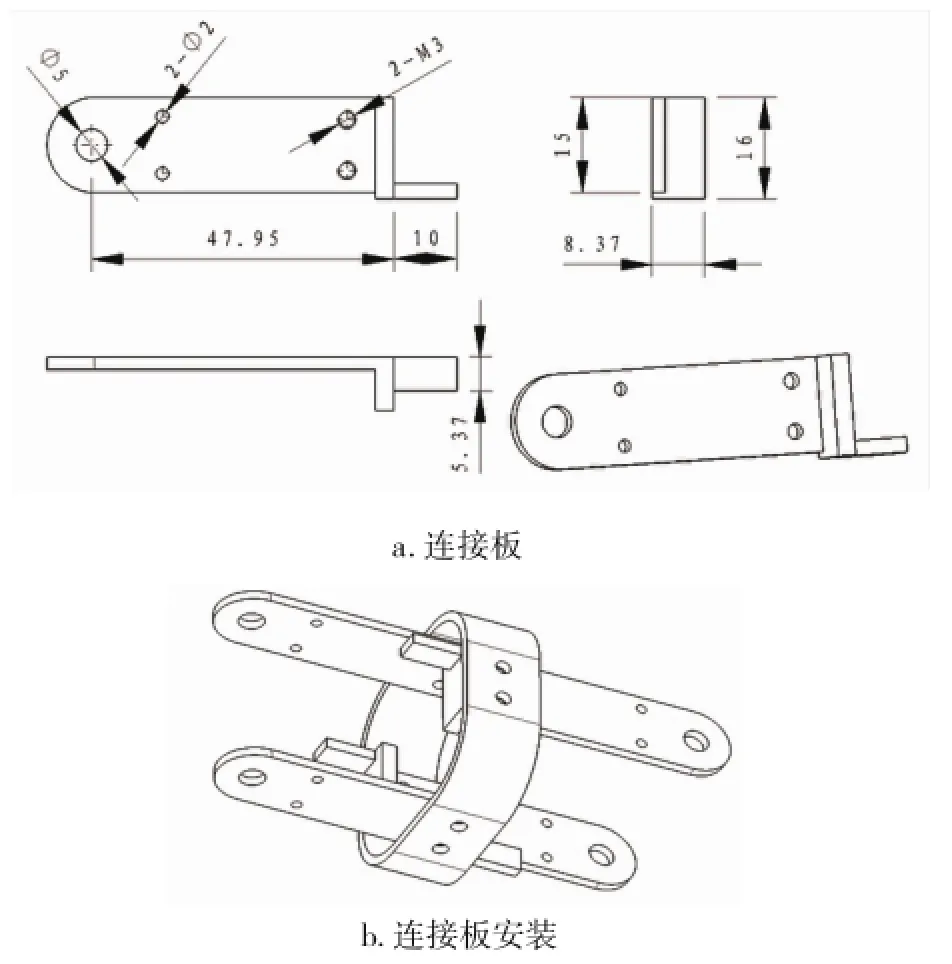
图10 机连接板示意图Fig.10 The schematic of Machine webs
(5)挡块设计
为使舵机完全固定,保证机器人有效运行,根据舵机布局形式及安装位置及尺寸,设计档块对舵机进行固定,如图11中a所示。将连接支架、连接板、电源、控制板与舵机及舵机齿轮初步装配后,用螺钉将挡块紧固于连接板上对舵机定位(如图11中b所示),保证机器人的有效运行。
(6)十字轴设计
为尽可能地模拟生物蛇万向节结构形式,减小机器人单元长度,增大单元间转角。将常用万向节用十字轴分体设计,将两单轴空间正交连接而成,由于十字轴是主要受力零件,所以设计一辅助零件来对连接部分加强。
分体式十字轴形式如图12所示,由①紧固螺钉销4件、②传动轴2件、③中转十字连接件1件、④连接螺钉1件等零件组成。零件②一端加工有螺纹,用于与传动齿轮的连接,另一端为光轴,轴两端均加工有螺纹孔,中间为方形,中心加工为螺纹孔;零件③两侧槽正交加工,两正交槽中心一孔;零件④将零件②、③进行连接,形成设计所需十字轴;将齿轮与十字轴组装,在两单元连接时将部件置于其间,然后通过零件①用于将机连接板与十字轴轴端螺纹孔连接,从而达到机器人万向节效果,完成单元间连接装配。

图11 挡块示意图Fig.11 The schematic stopper

图12 十字轴示意图Fig.12 The Schematic of cross
(7)头尾部结构设计
为避免机器人在细小的死胡同无法工作,让机器人能够时刻调头转向,将机器人头尾部设计统一,使机器人运行过程中头尾可以交互使用。在头尾部装上视频探测器及传输设备,使机器人将前方探测结果传回后方主机,机器人头尾部结构如图13所示。
(8)关键零件的验算
设计时需要对十字轴、齿轮等受力传动零部件进行设计验算,为便于计算,可取极端情况进行验算。根据相应验算结果对其进行再度优化设计,直到蛇形机器人更轻、更小、更简单、功能更多元化。

图 13 机器人头尾关节示意图Fig.13 The schematic of Robot head and tail joints
(9)优化及整体布局
设计出机器人单元及连接结构后,为增强机器人运动效率,在蛇形机器人各单元外部加上从动轮,用螺钉固定到连接支架上。综合加工可行性、装配便利性和功能实现稳定性等问题后,将从动轮架与机器人密封骨架设计为一体,如图14中a所示。在组装时,只需将装有从动轮的从动轮架紧固于机器人单元上即可,如图14中b所示。
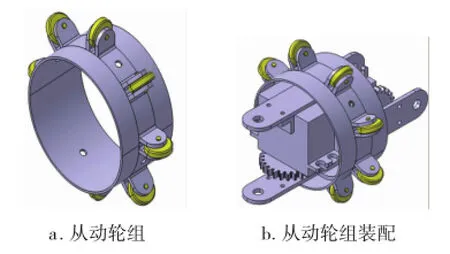
图14 从动轮示意图Fig.14 The schematic of drivon wheel
同时为使机器人能在更多的环境中运行,在机器人两单元的连接关节处用可伸缩波纹管进行密封,波纹管两端装配粘接到从动轮架上,使得机器人不会因为水或细微杂质导致失效。经过优化设计后机器人单元长度为90 mm,加上从动轮后机器人直径为80 mm,以后10单元机器人为准,统计出机器人零件数量为521件。其模型见图15。
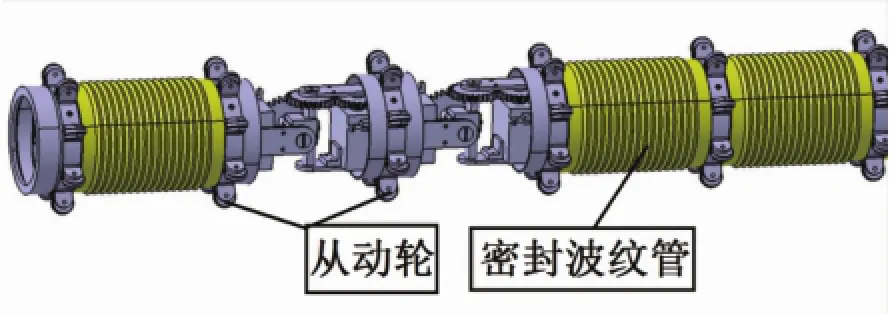
图15 机器人模型示意图Fig.15 The schematic model of the robot
4 总结
通过对蛇形机器人十字轴进行分体设计,简化了机器人单元之间连接结构,根据冲压件、注塑件零件设计原理,对机器人各零件进行简化设计,减小了传动部分的误差,增强了机器人的运动协调性、装配制造便利性,降低了机器人成本。
参考文献:
[1]林可干.蛇是怎样运动的[J].蛇志,1989(2):19.
[2]顾雪玲.蛇养殖与蛇产品加工[M].北京:科学技术文献出版社,2003:10.
[3]赵尔宓.中国动物志·爬行纲(第三卷)[M].北京:科学出版社,1998:11.
[4]Hirose S.Biologically inspired robots-snake-like locomotor and manipulator[M].Oxford:Oxford University Press,1993:1-13.
[5]Endo G,Togawa K,Hirose S.Study on self-contained and terrain adaptive active cord mechanism[C]//IEEE International Conference on Intelligent Robots and Systems. Kyongju:IEEE,1999:1399-1405.
[6]Togawa K,Mori M,Hirose S.Study on three-dimensional active cord mechanism:development of ACM-R2[C]// IEEE International Conference on Intelligent Robots and Systems.Takamatsu:IEEE,2000:2242-2247.
[7]陈丽,王超越,李斌.蛇形机器人研究现状和进展[J].机器人,2002,24(6):560-563.
[8]刘洋,李世其,谢涛.单马达驱动蛇形机器人的设计研究[J].中国机械工程,2009,20(4):401-404.
[9]宋能松.欠驱动蛇形机器人模块的设计研究[J].机器人技术,2010,1(37):75-77.
[10]崔春.仿生蛇的设计及其运动仿真[D].哈尔滨:哈尔滨工业大学,2009.
[11]陈丽,王越超,李斌,等.蛇形机器人的翻滚运动及其越障研究[J].高技术通讯,2003:7.
[12]B.Klaassen and K.L.Paap.GMD-SNAKE2:a snake -like robot driven by wheels and a method for motion control[J].IEEE International Conference on Robotics and Automation,Detroit,Michigan,1999.
[13]http://v.youku.com/v_show/id_XMzI2NjI1NTEy.html?f=16705896.
[14]Alessandro Crespi,Auke Jan Ijspeert.AmphiBot II:An Amphibious Snake Robot that Crawls and Swimsusing a Central Pattern Generator[J].Swiss Federal Institute of Technology,2006,9:19-27.
[15]http://baike.baidu.com/link?url=esKa_ac7CjLkqvK1 AP5YnCq_ gHnPllWknobD0MW41wOwG8xY7yIh65yRur 4KJDw4bUIgHqolUqJ4fm8Y8gL5Iq.
中图分类号:TP242
文献标识码:A
文章编号:1673-6125(2016)02-0032-05
收稿日期:2015-12-06
基金项目:2013年贵州省科学技术基金项目:“一种仿生蛇机器人的结构设计与步态规划研究”(黔科合J字LKG[2013]60号)阶段性成果。
作者简介:张 琢(1985-),男,贵州思南人,助教、硕士。主要研究方向:微型机器人,微制造技术。
Structural research and design of a bionic snake-like robot
ZHANG Zhuo1,XU Zhi-jia1,WANG Jun2
(1.College of Mechanical Engineering,Guiyang University,Guiyang 550005,Guizhou Province,China;
2.Huayang Electrics Company,AVIC Guiyang Guihang Automotive Components Limited Company,Guiyang 550006,Guizhou Province,China)
Abstract:Compared with other unit connection structures,universal joint connection inside single joint provides many advantages:less unit,better structural performance,etc.Viewed by structure of the snake body and working environment of snake-like robot,a bionic snake-like robot structure of universal joints connection inside single joint is designed.The cross-shaft of common universal joint structure is separately designed,which has simplified the robot structure.The robot length,diameter and the number of robot parts is 91 millimeters,80 millimeters and 521 respectively.
Key words:Bionics;Snake-like Robot;Structure Design
