基于STM32F411RET6的智能搜救系统
2016-08-08湖北工业大学电气学院卢宝全李仄立
湖北工业大学电气学院 卢宝全 李仄立
基于STM32F411RET6的智能搜救系统
湖北工业大学电气学院 卢宝全 李仄立
【摘要】论文以自动报警营救演示系统为主题,模拟了现实生活中人类在广袤的野外和海上的活动中遇险受困后外部有效及时的救援的场景。设计了当信标以随机顺序报警,救援小车以相应顺序快速、准确、高效的实施救援的一个基于无线传感网络的遇险自动报警与营救系统。该系统采用Zigbee2530模块构成无线网络系统,以ST微控制芯片STM32F411RET6为核心,外接传感器电路和驱动电路,传感器电路采用OV7620摄像头模块和超声波模块对信号进行采集以及处理,驱动电路采用单MOS电机驱动来实现对电机的有效驱动。软件设计中用基于灰度值的光源图像处理算法进行图像处理,用自己设计的超声波避障算法实现避障功能,用经过算法处理得出的PWM信号实现对电机和舵机速度和方向的控制。
【关键词】STM32F411;Zigbee无线传感器网络;超声波避障;摄像头图像处理
1 引言
论文以自动报警营救演示系统为主题,模拟了现实生活中人类在广袤的野外和海上的活动中遇险受困后外部有效及时的救援的场景。在此过程中,遇险人员如能够发送预警定位信息;外部救援人员则能够有效侦查探测遇险人员的位置,然后前往实施营救。其中遇险人员用能够发光的信标模拟,外部救援人员用救援小车来模拟,当小车行驶到信标附近一定半径时,则认为一次救援成功。
系统模拟过程简介:
本系统模拟野外遇险营救,设计有模拟遇险人员的5个信标、模拟救援队员的自动移动的2个车模,如图1-1所示。过程中5个信标先随机点亮一个模拟报警,被点亮的那个信标我们称为信标1,车1从出发区出发,自动前进到信标1的救援半径内。然后信标1自动解除报警,然后随机选择一个信标——信标2开始报警。车模2从出发区出发,前进到信标2 救援区域内。然后信标2解除报警,同理信标3开始报警。上述过程持续下去,直到车模前进至信标5的救援区域。至此模拟完成整个搜救过程。

图1-1 智能搜救示意图
2 系统组成结构
整个系统可以分为信标部分、小车部分和无线传感器网络三部分,信标一共有5个,小车一共有2辆,每一个信标以及每一个小车上都有一个zigbee模块。接下来分别介绍小车、信标和无线传感器三个部分。
2.1小车系统结构
小车的组成结构如图2-1所示,小车部分主要由STM32F411RET6核心主电路板、OV7620摄像头、超声波模块、编码器模块、电机驱动、电机、三个舵机模块以及电源部分组成。

图2-1 小车结构框图

图2-2 摄像头处理流程图
2.1.1OV7620摄像头
OV7620摄像头和STM32F411主控芯片之间的通讯有两部分,一部分是8bit的数据口DATA[0-7],另外一部分是1个场中断信号线VSYN,1个行中断信号HREF。采集一幅图像的方法是,当一个场中断来了之后,以后每次行中断来都不停的采集8bit数据口的数据(0-255的灰度值数据),将采集到的数据存到一个二维数据中就完成了图像的采集。摄像头处理的流程图2-2所示。
2.1.2超声波
超声波模块是通过测距来判断前方是否有障碍物,超声波测距的原理如图2-3所示,首先由STM32F411一个引脚发射一个10us的高电平的触发信号,超声波模块就会循环发射8个40KHZ的超声波脉冲,当超声波遇到障碍物反射回来时会被模块接收到,这时回响信号引脚会输出一段时间的高电平,而这时STM32F411就会去检测这段高电平的时间,这段时间就是超声波从发生到接受所经历的时间,再乘以声音在空气中的传播速度就得到了小车离前方障碍物的距离。又因为超声波模块发射的角度不广,所以在超声波模块下面加上一个舵机使其可以扫描前方180度的范围,这样就可以把小车前方的情况判断清楚。
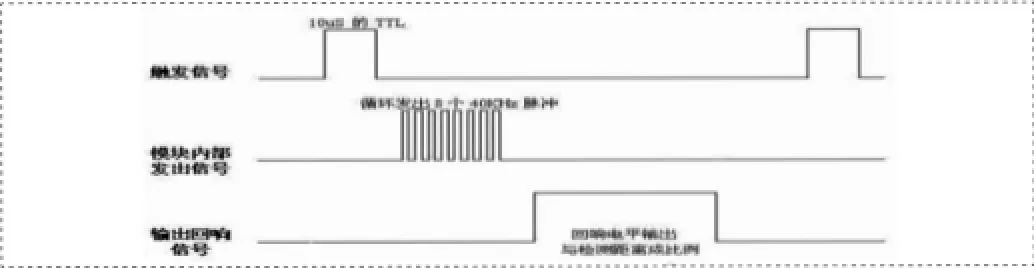

图2-3 超声波测距原理
超声波避障的算法是建立在超声波测距的基础之上的,超声波避障算法流程图如图2-4所示。小车在向目标行驶的过程中,超声波会不停检测前方的障碍物,如果检测到有障碍物就会立即停车,然后再次扫描前方180度范围内的障碍物,这将得到前方180度范围内有无障碍物,以及在前方180度范围内哪些方向有障碍物,哪些方向没有障碍物,还会知道最宽广的出口方向在哪。如果检测到前方的障碍物离小车太近了,那么小车转向的时候即使打到最大的角度也可能会撞上障碍物,那么就让小车先后退一段距离以留出足够的空间让小车转向。
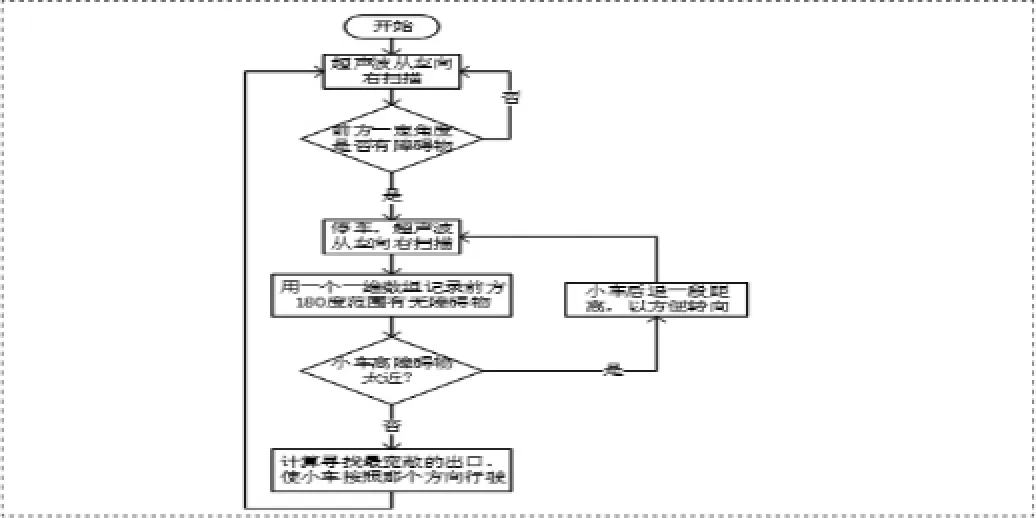
图2-4 超声波避障算法流程图
2.1.3光电编码器
光电编码器的作用是实时记录反馈小车的车速,这样小车的速度就会比不加编码器时得到更好的控制。而小车速的的控制算法采用经典的PID控制算法。PID的控制算法的示意图如图2-5所示。

图2-5 小车速度控制PID算法
2.1.4舵机和电机
小车上一共有三个舵机,一个用于控制小车转向的,我们叫方向舵机;一个用于控制摄像头扫描的,我们叫摄像头舵机;还有一个用于控制超声波扫描的,我们叫做超声波舵机。舵机的控制很简单,就是STM32F411的引脚输出频率为300HZ的PWM,不同的占空比的PWM波控制舵机转不同的角度。
同理输出两路100KHZ的PWM信号给电机驱动可以控制小车电机转动,A相为PWM波,B相为0时,电机正转;A相为0,B相为PWM信号时电机反转。不同的占空比电机输出的力不同。
2.1.5小车系统软件流程
小车的整个软件流程图如图2-6所示。首先小车会检测zigbee有没有发来信息,并根据情况自己决定自己需不需要通过zigbee向外发送信息,然后就会用超声波检测前方有没有障碍物,如果有障碍物则进一步判断障碍物是否是信标,因为当小车行驶到信标的救援半径内时,信标首先会被超声波检测到为障碍物,在通过摄像头的图像处理被判断为信标而不是障碍物,这时小车会停车,并发送相应信息。如果小车判断前方是障碍物而不是信标,那么就根据超声波避障算法避障。确认前方没有障碍物的时候,就通过摄像头扫描信标,扫描到了信标就跟踪信标,使小车向信标的方向行驶。
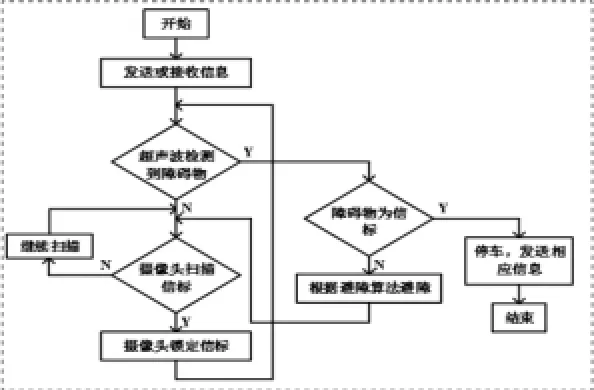
图2-6 小车系统的软件流程图
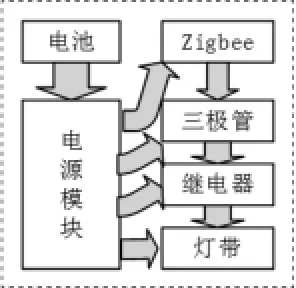
图2-7 信标结构框图
2.2信标系统结构
信标的系统结构框图如图2-7,信标的部分主要由电源部分,zigbee,灯带驱动电路以及灯带组成。Zigbee的IO口如果是高电平就会导通三极管进而闭合继电器最后使灯带点亮。
2.3zigbee无线网络
整个系统之间的无线通讯采用的是zigbee无线传感网络。Zigbee的网络拓扑如图2-8所示。整个系统zigbee通讯结构图如图2-8所示。
图2-8a 星形网络拓扑

图2-8c 网络形网络拓扑
Zigbee的网络拓扑又可以分为星形,树形和网络型。而在本系统中我们采用的是网络型拓扑结构。其中车一为协调器,车二以及5个信标均为路由器。他们两两之间可以相互通讯。
系统各部分之间的通讯图如图2-9所示。系统整个流程是:首先开启车1的协调器,然后依次开启信标1-5的路由器(随机开启,最先开启的为信标1,以此类推),最后开启车2的路由器,信标1-5以及车2逐一将自己的网络地址发送给车1协调器,车一协调器接受到了所有的短地址之后将这些地址发送给车2。这样车1和车2就知道了网络中每个节点的地址了。然后车一给信标1发送信号,让信标1报警,车1根据以上算法搜寻信标1,到达了信标1的救援半径之后,向信标1发送信息让信标1停止报警,并给信标2发送信息使信标2开始报警,并通知车2开始搜寻信标,以此类推,完成整个搜救过程。
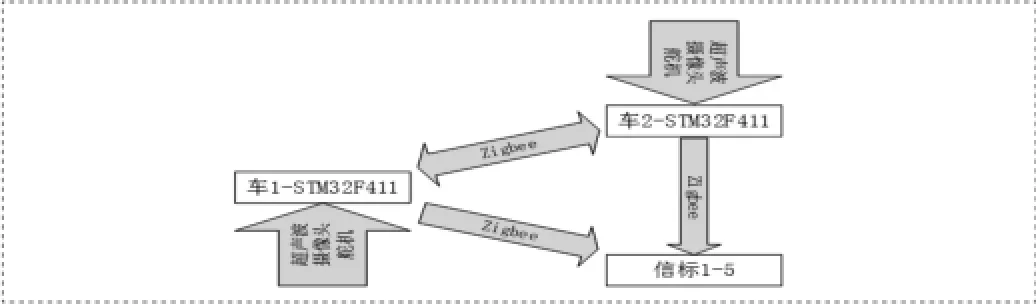
图2 -9 系统各部分之间的通讯图
3 结论
本论文中介绍了自行设计的基于无线传感网络的遇险自动报警与营救系统的基本思路,它包括机械、电路以及控制算法的思想。在机械结构方面,自主设计信标,利用舵机增加了摄像头以及超声波的扫描广度;在电路方面,设计并选择了电源模块、最小系统、主板、电机驱动、摄像头、超声波、速度传感器这几个模块;在算法方面,使用C语言编程,调试程序,设计出一套比较实用的、稳定的程序。
参考文献
[1]薛美盛,薛生辉,雷超杰,吴军.一种改进的脉宽调制PID控制算法及其应用[J].环境工程.2013(05).
[2]李香宇,王世功,王萌,张亚周.基于PID算法和PWM控制的温控系统设计[J].仪表技术,2016,05:31-33.
[3]张岩,裴晓敏,付韶彬.基于单片机的智能循迹小车设计[J].国外电子测量技术,2014,03:51-54.
[4]李香宇,王世功,王萌,张亚周.基于PID算法和PWM控制的温控系统设计[J].仪表技术,2016,05:31-33.
[5]臧杰,阎岩.汽车构造[M].北京:机械工业出版社,2005.
[6]童诗白,华成英.模拟电子技术基础[M].北京:高等教育出版社,2001.
[7]阎石.数字电子技术基础[M].北京:高等教育出版社,2000.
[8]尹勇.Protel DXP电路设计入门与进阶[M].北京:科学出版社,2004.
[9]曹晶.CMOS图像传感器在智能车路径识别中的应用分析[J].电子测试,2016,06:36-37.
[10]刘涛,吕勇,刘立双.智能车路径识别与控制性能提高方法研究及实现[J].电子技术应用,2016,01:54-57.
[11]徐跃.基于超声波测距的机器人定位与避障[D].齐鲁工业大学,2013.
[12]柴锁柱.基于超声波测距的自动避障智能车设计[J].沧州师范学院学报,2016,01:56-58.
[13]高守玮,吴灿阳,等.ZigBee技术实践教程[M].北京:航空航天大学出版社,2009.
[14]蔡绍滨.无线传感器网络关键技术的研究与应用[M].哈尔滨:哈尔滨工业大学出版社,2011:47-51.
[15]李宇,王卫星,陈润泽.基于ZigBee的物联网智能家居系统[J].电子测试,2016,05:71-75.
[16]章伟聪,俞新武,李忠成.基于CC2530及ZigBee协议栈设计无线网络传感器节点[J].计算机系统应用,2011,07:184-187+120.
[17]李俊斌,胡永忠.基于CC2530的ZigBee通信网络的应用设计[J].电子设计工程,2011,16:108-111.
[18]蔡利婷,陈平华,罗彬,魏炎新.基于CC2530的ZigBee数据采集系统设计[J].计算机技术与发展,2012,11:197-200.
作者简介:
卢宝全(1987—),男,硕士研究生,研究方向:工程管理。
Intelligent search and rescue system based on STM32F411RET6
School of electricity, Hubei University of Technology LU BaoquanLI Zeli
Abstract:The paper take the automatic alarm and rescue demonstration system as its theme, simulate the scene when human beings are trapped in distress in the vast field and the sea and then the external personnel implement effective and timely rescue. The paper design a distress auto alarm and rescue system based on wireless sensor networks , which the beacon alarm in random order, and then the rescue vehicle implement the rescue rapidly,accurately and efficiently in the corresponding order. The system uses Zigbee2530 module to form a wireless network system, take the ST micro control chip STM32F411RET6 as the core, extend sensor circuits and drive circuits. The sensor circuit uses OV7620 camera module and ultrasonic module to collect and process the signal. Drive circuit using a single MOS motor drive to achieve the effective drive of the motor. In the software design, the image processing algorithm based on the gray value of the light source is used for image processing, and use my own designed ultrasonic obstacle avoidance algorithm to achieve the function of obstacle avoidance, lastly, use the PWM signal obtained by algorithm to control of speed and direction of motor and servo motor.
Keywords:STM32F411; Zigbee wireless sensor network; Ultrasonic obstacle avoidance algorithm; Camera image processing algorithm
