基于MC9S12XDT256的混合动力控制器的开发
2016-08-06任钢南京越博动力系统股份有限公司江苏南京210000
任钢(南京越博动力系统股份有限公司,江苏 南京 210000)
基于MC9S12XDT256的混合动力控制器的开发
任钢
(南京越博动力系统股份有限公司,江苏 南京210000)
介绍一种基于MC9S12XDT256开发的混合动力控制器的软硬件系统。详细描述控制器的硬件结构框图,包括抗电磁干扰设计,以及控制系统的软件控制策略。并以某混联式混合动力公交为对象,实现混联式混合动力系统纯发动机驱动、纯电机驱动、混合驱动、行驶充电、停车充电、怠速起停、制动能量回收等多种工作模式。证明该控制器的硬件及控制策略可以满足混合动力系统的控制需求。
混合动力;控制器;控制策略
混合动力汽车是指车辆驱动系由2个或多个能同时运转的单个驱动系联合组成的车辆,车辆的行驶功率依据实际的车辆行驶状态由单个驱动系单独或共同提供。通常由发动机、电机、电池组构成,它充分发挥了内燃机车和电动汽车的优点,具有良好的燃油经济性以及较低的排放[1]。
混合动力控制器作为混合动力系统的核心关键部件,根据驾驶员的驾驶意图、油门踏板位置、发动机转速、车速、行驶工况,对电机以及发动机的能源进行合理分配,使发动机及电机输出相应的扭矩,从而达到降低排放和燃油消耗的目的[2]。
混合动力系统一般分为串联、并联、混联3种。为了最优化分配电机以及发动机的能源,本文基于混联式混合动力系统进行研究,它具备纯发动机驱动、纯电机驱动、混合驱动、行驶充电、停车充电、怠速起停、制动能量回收等多种工作模式[3]。
1 混合动力系统构成
混联式系统结构如图1所示。发动机的动力通过离合器经过ISG后,和6挡变速器组成的传动系统驱动后轮,为典型的混合式混合动力系统。在该混合系统中,发动机为柴油机,ISG为直流电机,动力电池为镍氢电池,6挡变速器为AMT自动变速器。
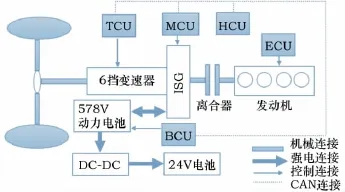
图1 混合动力系统构成图
为了减少整车线束,采用CAN总线技术实现整车控制单元HCU、电机控制单元MCU、变速器控制单元TCU、发动机控制单元ECU、电池控制单元BCU组成。
2 混合动力控制器硬件设计
控制硬件包括微处理器、CAN通信模块、数字量采集模块、模拟量采集模块、频率量采集模块、功率驱动模块电源模块等。控制器硬件框图如图2所示。
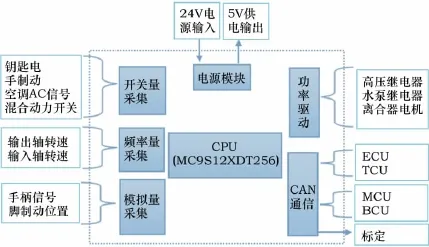
图2 控制器硬件框图
微处理器CPU采用飞思卡尔公司生产的MC9S12XDT256,它拥有16位的中央处理器,16路10 bit的AD转换模块,8路ETC输入捕捉模块以及8路PWM占空比输出模块,3个符合CAN2.0标准的CAN控制器。该控制器主频可到达40MHz,完全适合混合动力控制的使用。
开关量采集电路、频率量采集电路采用RC滤波、过压保护、滞回比较设计,具有较强的抗电磁干扰能力。
模拟量采集电路采用π滤波以及过压设计,具备较强的EMC能力。
CAN收发器采用TJA1050,其最高收发速率可达1Mb/s,同时具备良好的抗干扰能力。CAN收发电路具有120Ω的匹配电阻及ESD保护,可过15kV的静电。
3 混合动力控制器控制策略设计
混合动力控制器控制策略流程图如图3所示。总共分为上电自检、系统调度、停车控制、换挡控制、在挡运行、故障诊断、换挡规律、能量分配等模块[4]。
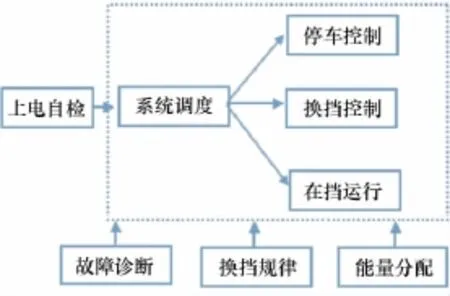
图3 控制策略流程图
3.1上电自检
上电自检模块用于混合动力系统上电自诊断,检查系统是否能符合正常启动的条件。检测步骤如下。
1)检测CAN通信网络是否正常。控制器检测能否收到ECU、BCU、MCU、TCU等发来CAN信息,从而判断CAN网路系统状态以及各系统的工作状态。
2)检测控制器能否控制离合器分离和结合,检测离合器执行机构及控制器内部驱动电路是否正常。
3)检测TCU工作状态。控制器发送空挡命令给TCU,TCU执行命令使机构换为空挡,同时反馈执行状态以及TCU故障信息给控制器。
4)如果以上自检都通过,则HCU自检成功,同时控制器控制高压继电器,使高压动力电池供电给电机。
3.2系统调度
系统调度模块用于判断停车控制、换挡控制、在挡运行模式间的切换,它根据换挡规律模块输出进行判断。当目标挡位与实际挡位不符合时,进入换挡控制模块,当换挡控制模块完成换挡工作,如果为空挡则进入停车控制模块,否则进入在挡运行模块。
3.3停车控制
停车控制模块用于进行停车时的一些系统处理工作,其中包含停车等待、怠速起停、停车充电。
当发动机为工作状态,SOC电量低于30%则进入停车充电模块;当SOC电量高于40%,而且空调AC未开,则进入怠速起停模块;否则进入停车等待模块。
1)停车等待该模式下,发动机处于怠速状态或停机状态,变速器处于空挡,电机处于自由状态。
2)怠速起停当进入该模式时,控制器通过CAN通信请求ECU将发动机断油熄火,同时控制器控制离合器接合。当驾驶员控制手柄进入行驶模式时,控制器通过CAN通信请求MCU将电机工作在800r/min,使电机将发动机发动起来,然后MCU控制电机进入自由状态。
3)停车充电当进入该模式时,控制器控制离合器接合,然后通过CAN通信请求MCU负扭矩控制,使电机给高压电池进行充电。当SOC电量高于40%时MCU控制电机进入自由状态,同时控制器控制离合器分离。
3.4换挡控制
1)发动机降扭矩控制器根据当前发动机实际扭矩、油门开度计算目标扭矩,防止离合器分离时出现发动机转速飞升的现象。
2)离合器分离控制器使离合器分离,为变速器摘挡做准备。
3)请求TCU换挡控制器发送目标挡位给TCU,TCU响应目标挡位并反馈执行情况。
4)离合器接合控制器根据油门开度计算离合器目标位置。接合快慢影响车辆换挡舒适性。
5)发动机恢复扭矩控制器根据油门开度计算发动机目标扭矩。
3.5在挡运行
控制器根据能量分配模块的输出对发动机以及电机的功率进行控制。
3.6故障诊断
控制器检测MCU、BCU、ECU、TCU发送的故障信息进行故障处理,例如1级故障停车;2级故障限扭30%;3级故障限扭60%;4级故障报警不作处理。
3.7换挡规律
控制采用车速、油门开度两参数的换挡规律实现目标挡位的计算,如图4所示。
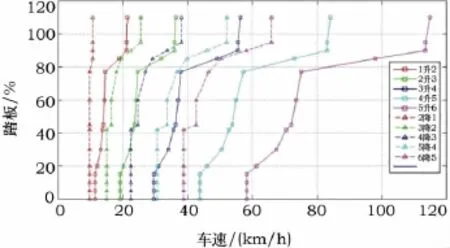
图4 两参数换挡规律
3.8能量分配
能量分配模块分为纯发动机驱动、纯电机驱动、混合驱动、行驶充电、制动能量回收5种工作模式[4]。
1)纯发动机驱动当SOC低于30%而且不满足行驶充电模式或不满足混合驱动模式时,系统进入纯发动机驱动模式。在该模式下,发动机的响应扭矩等于驾驶员请求扭矩。
2)纯电机驱动模式当SOC大于40%而且目标挡位低于3挡时,系统进入纯电机驱动模式。在该模式下,电机响应扭矩等于驾驶员请求扭矩。
3)混合驱动模式当油门开度大于95%,SOC大于40%,发动机转速低于1 300 r/min时,系统进入混合驱动模式。在该条件下发动机工作效率低,整车加速性差,排放也高。在该模式下,发动机的响应扭矩等于驾驶员请求扭矩,电机扭矩根据车辆加速度情况进行扭矩分配输出。
4)行驶充电控制器根据驾驶员需求扭矩Tt以及发动机万特性图进行优化。首先计算在当前转速下的发动机效率最高时的扭矩Ti。当Ti>Tt时,进入行驶充电模式;发动机响应扭矩等于Ti,电机响应扭矩等于Ti-Tt。
5)制动能量回收控制器根据制动踏板开度作为输入,对电机输出负扭矩,使系统进入能量回收模式。
4 试验验证与结果分析
控制器在某混联式混合动力车上进行了试验,对混合动力系统的整个控制流程进行了验证。
1)整车起步当操纵手柄从N挡换至D挡时,控制器控制离合器分离,同时发送指令给TCU请求换2挡。当TCU完成换挡后,系统进入纯电动模式,控制器发送调速指令给ECU,使发动机转速保持怠速650r/min。同时控制器发送扭矩指令给MCU,使MCU响应驾驶员请求扭矩。为了防止驱动电机过流或减少电机驱动冲击性,控制器发送给MCU的目标扭矩需要以一定的速度缓慢增加,而不能瞬时响应驾驶员请求的扭矩。具体过程如图5所示。
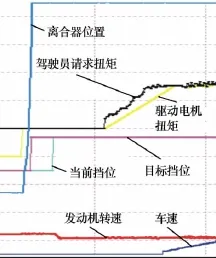
图5 整车起步
2)纯电动换挡当车速达到一定速度,达到目标挡位为3挡的要求。控制器请求MCU按照一定速率进行降扭,当扭矩为0时,控制器发送指令给TCU请求换3挡。TCU完成换挡后,控制器请求MCU按照一定的速率恢复扭矩。具体过程如图6所示。
3)制动能量回收当驾驶员松开油门开始滑行减速时,控制器MCU按照一定的速率进行负扭矩增扭,使驱动电机开始给高压电池进行充电。具体过程如图7所示。

图6 纯电动换挡
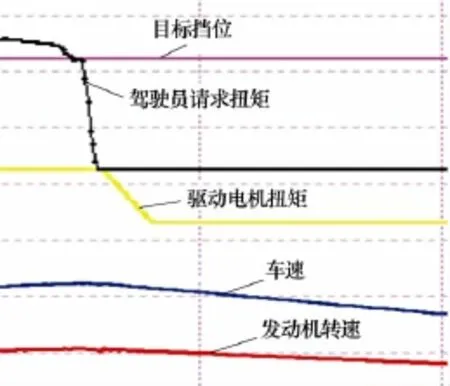
图7 制动能量回收
5 总结
1)所研发的混合动力控制器抗电磁干扰能力强,能基于CAN通信实现与MCU、TCU、ECU、BCU四大系统之间的相互配合,降低了线束设计难度。
2)所研发的控制策略能很好地完成混联式混合动力的各个功能,包括系统自检、系统调度、能量分配、换挡规律计算、换挡等功能,工作稳定可靠。
3)所研发的能量分配策略能很好地分配好发动机、电机的扭矩,从而提高了发动机的燃油经济性以及降低了发动机的排放。
[1]张亚明,何洪文,张晓伟.混合动力汽车整车控制器开发[J].中北大学学报 (自然科学版),2009,30(6):530-535.
[2]袁银南,王忠,钱恒荣,等.ISG混合动力汽车整车控制器的设计[J].汽车工程,2009,31(7):601-605.
[3]麻友良,陈全世.混合动力电动汽车的发展[J].公路交通科技,2001(1):77-80.
[4]王渊.并联式混合动力车整车控制单元的开发[J].西华大学学报 (自然科学版),2008,27(4):34-37.
(编辑杨景)
Development of Hybrid Controller Based on MC9S12XDT256
REN Gang
(Nanjing YueBoo Power System Co.,Ltd.,Nanjing 210000,China)
The hardware and software system of hybrid controller based on MC9S12XDT256 is introduced.The hardware structure block diagram of the controller is described,including anti electromagnetic interference design and software control strategy.Taking a hybrid bus for example,various working modes can be realized such as pure engine driving,pure motor driving,hybrid driving,charging in driving,charging in parking,idle start and stop,braking energyrecuperation.The hardware and control strategy of this controller is proved to meet the control requirements of the hybrid system.
Hybrid;controller;control strategy
U469.72
A
1003-8639(2016)02-0016-04
2016-01-07
