水下目标探测项目设备应用和发展趋势
2016-08-05王久曹敬涛卢秉武何邦涛广州海事测绘中心
◎ 王久 曹敬涛 卢秉武 何邦涛 广州海事测绘中心
水下目标探测项目设备应用和发展趋势
◎ 王久 曹敬涛 卢秉武 何邦涛 广州海事测绘中心
摘 要:本文介绍了近两年水下目标探测项目和设备的特点,总结了未来扫测设备应用的发展趋势等。
关键词:目标探测 多波束 侧扫声纳
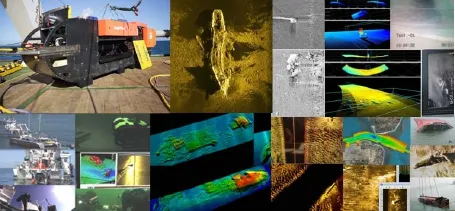
图一、相关项目部分探测设备和探测图像
1.引言
近年来,以侧扫声纳和多波束系统为代表的水下探测设备发展迅速,相关项目应用越来越多。现选取以下比较有代表性的几类进行比较分析:深浅水的失事飞机搜救、大小面积的扫海测量、深浅水的沉船扫测,这些项目上的设备应用在一定程度上代表了目前国际水下探测设备的前沿与未来发展趋势。
2.近两年相关项目应用概述
2.1马航MH370和亚航QZ8501搜索
(1)MH370于2014年3月8日失联,现荷兰辉固(Fugro)公司的赤道、Havila和谐号和中国的东海救101船仍在进行搜索。按ATSB(澳大利亚运输安全局)对MH370搜索声纳的技术指标要求,特别强调目标特征探测能力。飞机坠海后残骸中一般会有几块面积较大的物体,参考法航447残骸,发现引擎约4m长、3m宽,落地门2m长,也就说特征探测能力要求至少2m3,相当于IHO S-44规范40米以浅目标探测要求。适时,伍兹霍尔运行的AUV Nereus在探索克马德克海沟时疑发生陶瓷层内爆失踪。故最后确定方案为声学深拖设备进行高效率扫测,AUV进行疑似目标确认。主要搜索设备:
①Bluef in-21标配EdgeTech 2200-M侧扫声纳(120/410KHz,230/850KHz),Reson Seabat 7125多波束(200/400KHz),EdgeTech DW-216浅地层剖面仪(2-16KHz)。
②马来政府雇佣的Go Phoenix配备ProSAS-60合成孔径声纳,退出任务后,由东海救101继续进行搜索。ProSAS-60中央频率60KHz,最高分辨率10㎝×10㎝,单侧扫宽1500m。
③承担主要任务的辉固赤道号通过Dragon Prince深拖组合EdgeTech 2400 Deep Tows(DT1)进行探测,发现疑似目标后,由Havila和谐号释放AUV (HUGIN 4500)进行精扫,标配为Kongsberg EM2040多波束和EdgeTech 2400侧扫声纳。如2016年初,DT1发现疑似金属构件,AUV确认目标为19世纪商船(图一左上)。DT1侧扫声纳扫测时最低频率默认75KHz,Range700-800m。EM2040多波束低频200KHz,扫宽890m。船速控制:辉固船只的速度为2.7节,凤凰行号的速度为1.8节。综上,测线大概按照700-800m要求进行布设,忽略恶劣海况、凹凸地形和仪器本身性能极限,按测量面积和船速可以估算出扫测计划时间。
(2)2014年12月底,QZ8501在爪哇海域坠毁。以参与搜索的印尼方为例。MGS GEOSURVEY船配备EdgeTech 4200MP侧扫声纳、R2Sonic SONIC 2020多波束,Fugro的Starfix 9200-G2 差分系统定位。搜索时划分了失联区域、雷达捕获区域和漂浮物区域,最后在雷达捕获区域发现机翼、机尾和大部机身,进行侧扫声纳、多波束复测和ROV拍摄图像(图一右上)。
2.2珍珠港沉船和诺曼底登陆水域测量
(1)为观测沉船降解和构建3D可视化模型,2014年亚利桑那号战舰纪念馆对亚利桑那号和犹他号进行了水下、水上三维测量。测量同时采用多波束测深系统、激光扫描仪、水下相机进行。浅水采用无人船搭载R2SONIC SONIC 2020多波束进行扫测,深水采用R2SONIC SONIC 2024进行扫测,水上部分采用FARO激光进行测量,PPK(后处理)差分定位。
(2)为纪念诺曼底登陆,构建GIS数据库申遗,截至2014年,一些公司和个人志愿完成了诺曼底附近大概500㎞2海域的扫测。项目水域多在15~49m水深之间,采用EdgeTech 4600 (540KHz)组合测深声纳进行了大面积扫测,R2SONIC SONIC 2024 (700KHz)多波束进行精扫,SeaBotix 的ROV、潜水员和载人潜水器同时进行摄像确认目标(图一左下),Trimble SPS 855实现RTK和Fugro Marinestar的星基差分定位。
2.3El Faro商船和湛江彩虹应急搜救
(1)El Faro于2015年10月1日在百慕大遭遇飓风沉没,失事船长241m,宽32m,水深约4600m,根据航迹、救生圈和集装箱残片漂流路径进行分析扫测,于月底发现残骸,但主桅杆和船舶航行数据记录仪(VDR)未找到。船体的搜索由CURV-21组合TPL、ORION侧扫声纳进行,CURV-21可以在侧扫声纳和ROV功能之间切换;侧扫声纳(57/240KHz)高频300m扫宽用来分辨小目标,低频1800m和3000m扫宽搜索飞机残骸和大型沉船。在发现船体残骸后,由伍兹霍尔提供的AUV哨兵(Sentry)继续搜索VDR,VDR仅水桶大小,搜索难度大,AUV标配BlueView的P900-90前视声纳、EdgeTech 2200-M侧扫声纳(120/410KHz)、Reson 7125 多波束(200/400KHz),还搭载了EdgeTech 2205侧扫声纳(850KHz以上)。在使用多波束精扫沉船附近水域后,根据浅点分布细划扫测区域,于2016年4月底发现VDR。
(2)湛江台风彩虹应急扫测于2015年10月3日开始,投入5条船舶,3套多波束,2套侧扫声纳,完成约50㎞2面积水域扫测。湛港拖3船配备EdgeTech 42 0 0 M P、湛港引3船配备K l e i n HydroScan侧扫声纳分别扫测沉船和集装箱,海巡1761船携Reson SeaBat 7101、租用船舶安装R2SONIC SONIC 2024多波束进行全港池航道扫测,RBN/ DGPS定位。在航道内扫测到两处沉船影像,参考失事船舶的AIS路径制定计划进行集装箱扫测后,沿轨迹方向发现五十余个集装箱影像(图一右下)。
3.项目特点和设备应用发展趋势
(1)对目标特征点探测要求变高。IHO S-44、LINZ、USACE、CHS等规范对目标探测和覆盖率的规定都越来越严格,IHO特等测量要求在40m以浅水深,大于1m3的特征物必须被探测到;而USACE硬底质探测目标要求0.5m3,命中波束数大于3个。业内较为严格的LINZ标准规定特等水域需200%覆盖,并且:1)为描述海底特征,必须纵横各3次命中探测目标;2)为达到上述要求,Ping与Ping中心的距离不能超过被探测目标的一半。而CHS则考虑CUBE建面的需要(如15m以浅0.25m分辨率),网格内至少要有5个波束以保证数据密度。基于以上条件,目标探测对船速控制和覆盖率等都有更高要求。
(2)探测设备的分辨率也越来越高。①现水下探测主流设备仍然是浅水多波束和侧扫声纳,但UHR(Ultra High Resolution)设备开始推广应用,高频多波束如R2SONIC SONIC 2024 (700KHz),高频侧扫声纳(900KHz-2400KHz)如Sea Scan HDS、EdgeTech 4125、Klein 5900等,其他高频三维声纳如Echoscope、BV5000等,新技术设备如SAS和水下激光扫描仪等,对目标特征探测更加详细;②动态聚焦、多脉冲、姿态稳定等新技术普遍应用在各种探测设备上;③定位设备的精度也逐渐提高,RTK、PPK等技术成熟,OmniStar G4、Veripos、StarFire等星基差分应用陆续开始支持北斗系统,水下USBL、DVL、INS广泛应用在ROV、AUV导航上。
(3)成果格式要求由多样化日趋一致。以NOAA多波束提交成果为例,在2014年之前要考虑Fledermaus面、ESRI Arc ASCII、KML、GeoTIFF、XYZ、TXT等各种软件支持格式的需求,现则只需要提交符合S-102规范的BAG(水深属性网格)和GeoTIFF格式文件,BAG格式已被CARIS、ARCGIS等海洋GIS类软件支持。
(4)平台多样化,USV、AUV、ROV应用越来越广泛。近年来,水上USV和水下AUV、ROV等新技术在海道测量、应急搜索、科学探测等方面的应用有所进展。ATLAS、Kongsberg、LRI等公司的产品推广很快,多可同时搭载测深仪、多波束、侧扫声纳、SAS、照相机等设备,实现不同的功能,大量节省时间和成本,还达到了更准确探测的目的。
(5)设备向小型化、集成化发展。多波束设备的应用尤为明显,如2014 年Teledyne Odom、LRI、CARIS在夏威夷进行的海试,使用波浪滑翔者SV3无人船搭载Odom MB1多波束集成剖面声速仪、GPS、姿态、罗经进行测量,CARIS开发的Onboard模块自动生成BASE Surface,输出BAG文件上传,全程无需人工参与,极大地解放了人力。
(6)设备扩展开发、综合和组合应用越来越多。扩展应用方面,多波束测深系统的侧扫声纳/Snippets、WCI数据广泛应用于沉船扫测中;综合应用如船载激光和多波束三维测量等方面的研究技术成熟,EdgeTech 6205和2000-DSS等组合设备的使用频率增多。
7、IT技术的发展影响明显。SSD固态硬盘、4G通讯技术等新技术产品的推广普及,在数据存储和传输等方面,极大推动了水下探测技术的发展。以3D打印为例,在2014年的HMS Erebus(幽冥号)扫测项目中有典型的应用。

图二、幽冥号沉船扫测图像和3D模型
4.结语
通过比较不难发现:①合理利用已有资料进行分析、计划,针对项目要求选用合适设备,对微小障碍物采用多种方法综合判断等都有助于提高目标探测的效率;②水下探测设备和技术的更新应用越来越快,也不在局限于传统的保障航海安全范围,我们在探测技术和设备的推广应用上还有待提高。
参考文献:
[1]POERBANDONO. Seafloor Swathe Survey for Search and Rescue Mission of Air Asia QZ8501 [J]. Geodesy and Geomatics Engineering.2015.
